一种体素型机器人及包含其的系统的制作方法
本发明属于机器人,特别涉及一种体素型机器人及包含其的系统。
背景技术:
1、随着科技的发展,机器人技术也呈现爆炸式的增长,并且逐渐向着智能化、集成化、模块化的方向发展。目前,单一种类的机器人适应场景的局限性比较高,尤其是特殊场景下,往往需要设计专用的机器人,这样使机器人对环境适应性大打折扣。所以,相较于现有机器人技术中功能部件的模块化,具有足够高的自主驱动能力的体素型集群机器人系统拥有更高的通用性及适应性。
2、专利cn110561388a公开了一种模块化网状机器人,其特点是组成机器人的若干单元均为相同的,通过多个单元之间的连杆相互伸缩,从而使机器人产生各种运动模式。其不足点为:由于单元间只依靠连杆的伸缩相对运动,整体灵活性较差,所谓的模块化只能扩大机器人的规模,而不能依靠单元叠加实现功能拓展。
3、专利cn109050698a公开了一种模块化柔性爬行机器人,可通过支撑模块、伸缩模块、连接模块三种模块组成具备爬行能力的柔性机器人,其特点为全部采用柔性材料制作能实现前进、后退、转向等功能。其不足点为:由于机器人全部由软材料组成,造成自身的刚度和负载都较小,所以驱动系统无法集成在单元体上,每增加一个单元即需要增加一条控制气管,无法组成复杂的系统。
4、专利cn109676598b公开了一种自组装的模块化机器人,包括一个头部模块和可任意增减的相同的身体模块,模块和模块之间通过钩爪-插销机构连接。其不足点为:由于其单元只能在单一方向上连接,所以只能组成串行的机器人体,灵活性大打折扣,且单元体全部由刚体组成,整体质量大,造成驱动力浪费。
5、专利cn105172932a公开了一种基于细胞机器人单体的四足机器人,采用模块化设计思想,在结构上前后左右完全对称,可实现前进、后退、左移、右移等多种行走模式,各模块间便于拆卸、更换、组成。其不足点为:需要独立的供电模块,各单元体内不具备自供电能力,且各单元体不具备自主移动能力,所述的拆卸、更换、组装均需要人力介入。
6、因此,现有的机器人的灵活性、通用性及环境适应性均有所欠缺,亟需一种自主性强、灵活性高、通用性好的体素型机器人。
技术实现思路
1、为了解决上述问题,本发明提供了一种体素型机器人及包含其的系统,具有独立自主的运动能力,以及极高的环境及场景适应能力。
2、为此,本发明的技术方案是:一种体素型机器人,包括柔性体及柔性体轴向两侧端面;侧端面内部设有驱动及支承装置,且均可以轴线为中心相对柔性体旋转运动;所述柔性体为具有柔性结构的驱动器,具有至少一个特定方向的致动能力;所述侧端面上均设有若干轴向外耦合器和轴向内耦合器,柔性体的圆周面上设有若干径向耦合器。
3、在上述方案的基础上并作为上述方案的优选方案:所述柔性体具有沿轴向伸长和缩短的致动能力,和/或具备向任意方向摇摆的致动能力,并可以在任意角度停止或启动;所述摇摆包括正交方向上的前后左右摆动,以及圆周上任意角度的弯曲形变。
4、在上述方案的基础上并作为上述方案的优选方案:所述柔性体包括但不限于由连续刚体关节组成、由柔性材料制成、由柔性材料与刚性材料混合制成。
5、在上述方案的基础上并作为上述方案的优选方案:同一端面上的轴向外耦合器、轴向内耦合器数量一致,均为2的倍数,且所有轴向外耦合器、轴向内耦合器均匀分布在同一圆周线上,轴向内耦合器与轴向外耦合器对称分布。
6、在上述方案的基础上并作为上述方案的优选方案:所述柔性体外侧的径向耦合器两两一组,同组两个径向耦合器分布在柔性体两端,且同组两个径向耦合器沿轴向中心距长度与轴向外耦合器所在圆周线的直径一致。
7、在上述方案的基础上并作为上述方案的优选方案:所述径向耦合器与轴向外耦合器或轴向内耦合器结构一致。
8、在上述方案的基础上并作为上述方案的优选方案:所述轴向外耦合器、轴向内耦合器、径向耦合器均为机械式耦合器,或均为电磁式耦合器。
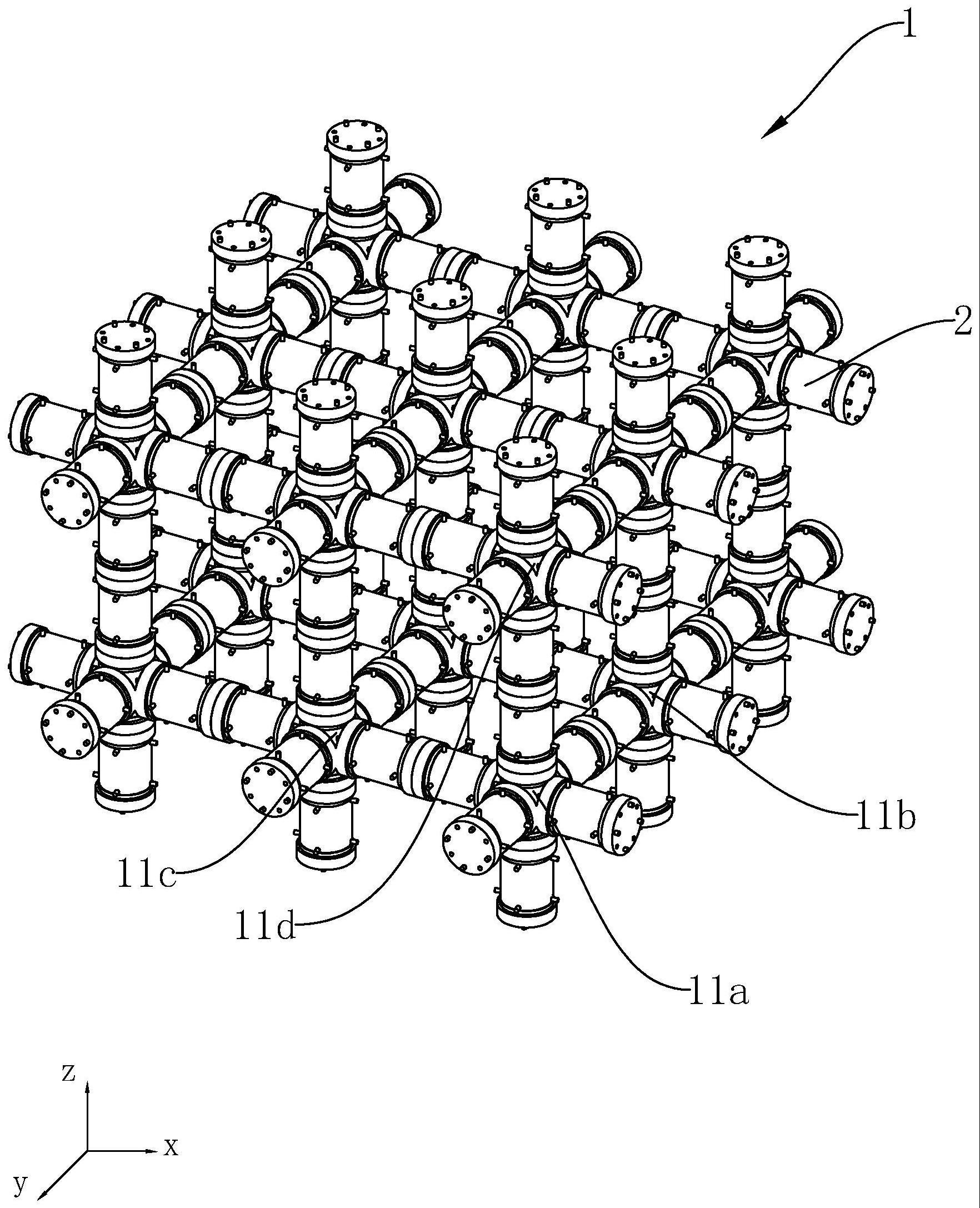
9、本发明的另一个技术方案是:一种包含上述体素型机器人的系统,由若干个耦合节点组成,每个耦合节点由至少1个体素型机器人构成,且任一耦合节点均可耦合不同方向设置的其他耦合节点。
10、在上述方案的基础上并作为上述方案的优选方案:相邻体素型机器人之间的耦合为径向耦合和/或轴向耦合,即:轴向外耦合器与轴向内耦合器耦合,或者,轴向外耦合器与径向耦合器耦合,或者,径向耦合器与轴向内耦合器耦合。
11、与现有技术相比,本发明的有益效果是:
12、1、单个体素机器人具有独立自主的运动能力和复杂的运动模式,端面可相对柔性体旋转,柔性体可沿轴向伸缩、在任意方向摇摆,或者同时伸缩摇摆,使得单个体素机器人具有很强的自主性和灵活性。
13、2、体素机器人的端面和圆周面上均设有配套的耦合器,每个体素机器人均可在轴向、径向等多方向来耦合其他体素机器人,从而形成不同类型的耦合节点;
14、3、每个耦合节点都在多方向进行拓展,实现机器人系统的无限可能,拓扑后的机器人系统复杂程度高,其驱动能力远高于单体素或多个非耦合的体素,具备极高的环境及场景适应能力。
技术特征:
1.一种体素型机器人,其特征在于:包括柔性体及柔性体轴向两侧端面;侧端面内部设有驱动及支承装置,且均可以轴线为中心相对柔性体旋转运动;所述柔性体为具有柔性结构的驱动器,具有至少一个特定方向的致动能力;所述侧端面上均设有若干轴向外耦合器和轴向内耦合器,柔性体的圆周面上设有若干径向耦合器。
2.如权利要求1所述的一种体素型机器人,其特征在于:所述柔性体具有沿轴向伸长和缩短的致动能力,和/或具有向任意方向摇摆的致动能力,并可以在任意角度停止或启动;所述摇摆包括正交方向上的前后左右摆动,以及圆周上任意角度的弯曲形变。
3.如权利要求1所述的一种体素型机器人,其特征在于:所述柔性体包括但不限于由连续刚体关节组成、由柔性材料制成、由柔性材料与刚性材料混合制成。
4.如权利要求1所述的一种体素型机器人,其特征在于:同一端面上的轴向外耦合器、轴向内耦合器数量一致,均为2的倍数,且所有轴向外耦合器、轴向内耦合器均匀分布在同一圆周线上,轴向内耦合器与轴向外耦合器对称分布。
5.如权利要求4所述的一种体素型机器人,其特征在于:所述柔性体外侧的径向耦合器两两一组,同组两个径向耦合器分布在柔性体两端,且同组两个径向耦合器沿轴向中心距长度与轴向外耦合器所在圆周线的直径一致。
6.如权利要求1所述的一种体素型机器人,其特征在于:所述径向耦合器与轴向外耦合器或轴向内耦合器结构一致。
7.如权利要求1所述的一种体素型机器人,其特征在于:所述轴向外耦合器、轴向内耦合器、径向耦合器均为机械式耦合器,或均为电磁式耦合器。
8.一种包含权利要求1~7任一项所述体素型机器人的系统,其特征在于:由若干个耦合节点组成,每个耦合节点由至少1个体素型机器人构成,且任一耦合节点均可耦合不同方向设置的其他耦合节点。
9.如权利要求8所述的系统,其特征在于:相邻体素型机器人之间的耦合为径向耦合和/或轴向耦合,即:轴向外耦合器与轴向内耦合器耦合,或者,轴向外耦合器与径向耦合器耦合,或者,径向耦合器与轴向内耦合器耦合。
技术总结
本发明公开了一种体素型机器人及包含其的系统,包括柔性体及柔性体轴向两侧端面;侧端面内部设有驱动及支承装置,且均可以轴线为中心相对柔性体旋转运动;所述柔性体为具有柔性结构的驱动器,具有至少一个特定方向的致动能力;所述侧端面上均设有若干轴向外耦合器和轴向内耦合器,柔性体的圆周面上设有若干径向耦合器。本发明的单个体素机器人具有独立自主的运动能力和复杂的运动模式,拓扑后的机器人系统复杂程度高,其驱动能力远高于单体素或多个非耦合的体素,具备极高的环境及场景适应能力。
技术研发人员:江楠,张弘,陈一凡,张学成,曲绍兴,钱劲
受保护的技术使用者:浣江实验室
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!