一种含恰约束主动支链的四自由度并联机构的制作方法
本发明属于并联机器人;尤其涉及一种含恰约束主动支链的四自由度并联机构。
背景技术:
1、并联机构具有刚度大、误差小、承载能力大、动态响应性能好等优点而受到人们的青睐。四自由度并联机构是并联机构中的一个重要类型,有着广泛的应用前景。比如车辆在行驶过程中,由于受到路况等环境条件的影响,会产生横摇、纵摇、横荡、纵荡和垂荡等多个自由度的耦合运动。将四自由度并联机构用于运动模拟台,能够模拟车辆的运动过程,为人员的训练和设备的测试提供平台。由于该类机构大多数为欠秩机构,导致运动学的分析较为复杂,且这类机构的奇异位形较多,使得目前可选用的机构构型也比较有限,影响了这类机构的实际应用。
技术实现思路
1、本发明的目的是提供了一种含恰约束主动支链的四自由度并联机构。
2、本发明是通过以下技术方案实现的:
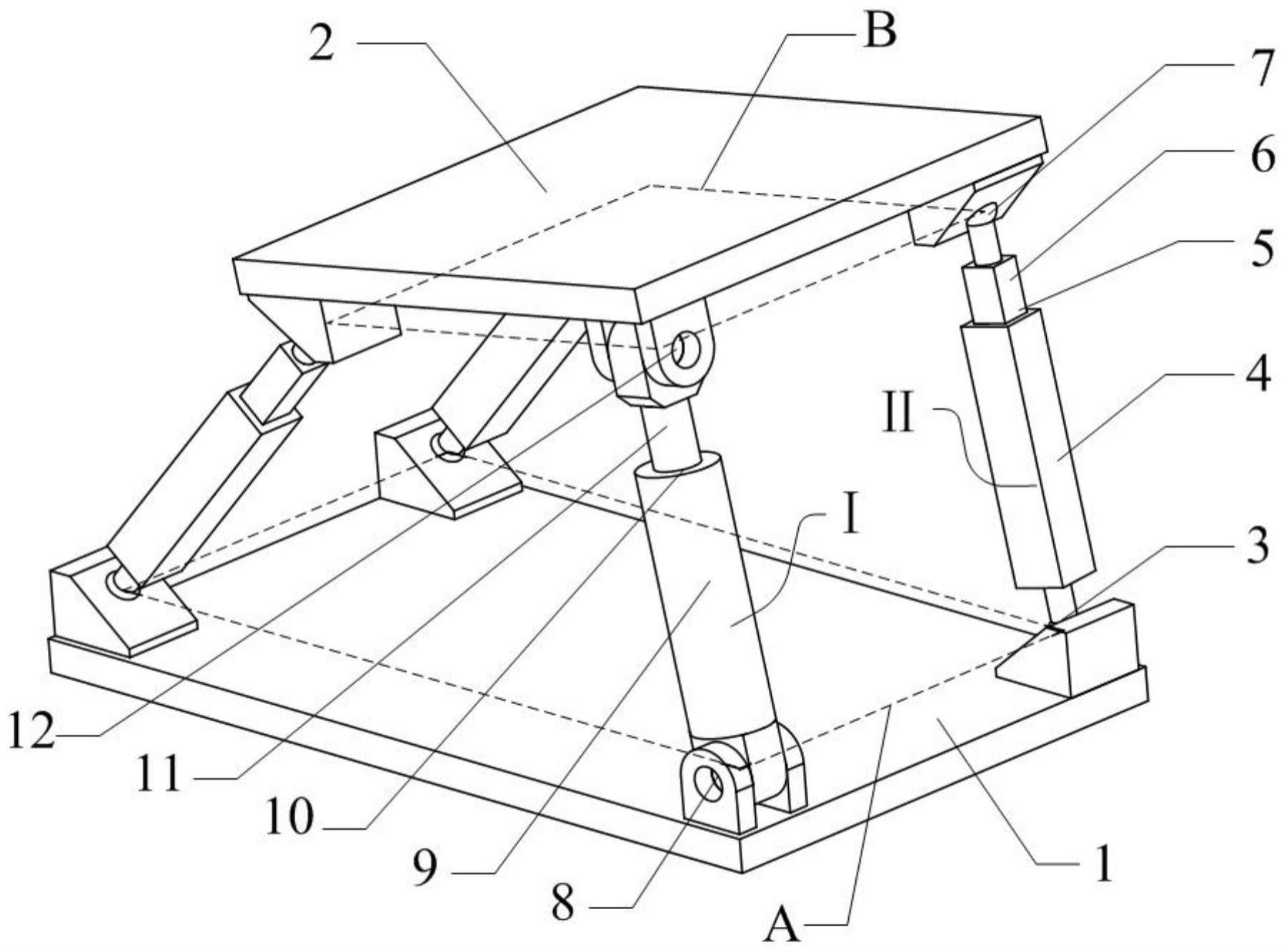
3、本发明涉及一种含恰约束主动支链的四自由度并联机构,包括固定平台1、动平台2以及连接固定平台1、动平台2的三条相同的无约束主动支链ii和一条恰约束主动支链i;其中,三条相同的无约束主动支链ii和一条恰约束主动支链i分别设置在固定平台1和动平台2的四个顶角处,且连接固定平台1、动平台2。
4、优选地,所述无约束主动支链ii由第一固定杆4、第一球铰3、移动杆6、移动关节5、第二球铰7构成;
5、其中,
6、第一固定杆4的一端通过第一球铰3与固定平台1连接;其另一端与移动杆6的一端通过移动关节5相连接;移动杆6的另一端通过第二球铰7与动平台2连接。
7、优选地,所述恰约束主动支链i由第一转动关节8、第二固定杆9、圆柱副10、导向杆11、第二转动关节12构成;
8、其中,
9、第二固定杆9的一端通过第一转动关节8与固定平台1连接,第二固定杆9的另一端与导向杆11的一端通过圆柱副10相连接;导向杆11的另一端通过第二转动关节12与动平台2连接。
10、优选地,所述圆柱副10与第一转动关节8、第二转动关节12为相互垂直设置。
11、优选地,所述第一转动关节8与第二转动关节12之间的初始安装位置为相互垂直设置,其中,圆柱副10为同轴线的一个转动关节和一个移动关节。
12、优选地,所述三条相同的无约束主动支链ⅱ及恰约束主动支链ⅰ与固定平台1相连接中心点连线构成矩形a;三条相同的无约束主动支链ⅱ、恰约束主动支链ⅰ与动平台2相连接中心点连线构成矩形b。
13、优选地,所述矩形a与矩形b宽度相等。
14、优选地,所述第一转动关节8的轴线与矩形a的宽度方向相互平行,第二转动关节12的轴线与矩形b的宽度方向相互垂直。
15、优选地,所述三条无约束主动支链ⅱ的移动关节为驱动关节,所述恰约束主动支链ⅰ的圆柱副10中的移动关节为驱动关节。
16、本发明具有以下优点:
17、本发明所涉及的一种含恰约束主动支链的四自由度并联机构,动平台能实现绕第一转动关节、绕第二转动关节的转动以及绕圆柱副轴线的转动和沿着圆柱副轴线移动;三个无约束主动支链及恰约束主动支链中驱动关节为靠近固定平台的移动关节,使得动平台可获得高速度和高加速度;三个无约束主动支链对动平台既提供驱动,恰约束主动支链对动平台既提供驱动,又提供约束,且恰约束主动支链自由度数目与类型与动平台的自由度和类型相同,可有效减小动平台的不可控误差;在恰约束主动支链上安装传感器,便可直接检测到动平台的位姿信息,进而有利于实现闭环反馈控制。
技术特征:
1.一种含恰约束主动支链的四自由度并联机构,其特征在于,包括固定平台(1)、动平台(2)以及连接固定平台(1)、动平台(2)的三条相同的无约束主动支链(ii)和一条恰约束主动支链(i);其中,三条相同的无约束主动支链(ii)和一条恰约束主动支链(i)分别设置在固定平台(1)和动平台(2)的四个顶角处,且连接固定平台(1)、动平台(2)。
2.如权利要求1所述的含恰约束主动支链的四自由度并联机构,其特征在于,所述无约束主动支链(ii)由第一固定杆(4)、第一球铰(3)、移动杆(6)、移动关节(5)、第二球铰(7)构成;
3.如权利要求1所述的含恰约束主动支链的四自由度并联机构,其特征在于,所述恰约束主动支链(i)由第一转动关节(8)、第二固定杆(9)、圆柱副(10)、导向杆(11)、第二转动关节(12)构成;
4.如权利要求3所述的含恰约束主动支链的四自由度并联机构,其特征在于,所述圆柱副(10)与第一转动关节(8)、第二转动关节(12)为相互垂直设置。
5.如权利要求3所述的含恰约束主动支链的四自由度并联机构,其特征在于,所述第一转动关节(8)与第二转动关节(12)之间的初始安装位置为相互垂直设置,其中,圆柱副(10)为同轴线的一个转动关节和一个移动关节。
6.如权利要求3所述的含恰约束主动支链的四自由度并联机构,其特征在于,所述三条相同的无约束主动支链(ⅱ)及恰约束主动支链(ⅰ)与固定平台(1)相连接中心点连线构成矩形a;三条相同的无约束主动支链(ⅱ)、恰约束主动支链(ⅰ)与动平台(2)相连接中心点连线构成矩形b。
7.如权利要求6所述的含恰约束主动支链的四自由度并联机构,其特征在于,所述矩形a与矩形b宽度相等。
8.如权利要求5所述的含恰约束主动支链的四自由度并联机构,其特征在于,所述第一转动关节(8)的轴线与矩形a的宽度方向相互平行,第二转动关节(12)的轴线与矩形b的宽度方向相互垂直。
9.如权利要求5所述的含恰约束主动支链的四自由度并联机构,其特征在于,所述三条无约束主动支链(ⅱ)的移动关节为驱动关节,所述恰约束主动支链(ⅰ)的圆柱副(10)中的移动关节为驱动关节。
技术总结
本发明提供了一种含恰约束主动支链的四自由度并联机构;包括固定平台(1)、动平台(2)以及连接固定平台(1)、动平台(2)的三条相同的无约束主动支链(II)和一条恰约束主动支链(I);其中,三条相同的无约束主动支链(II)和一条恰约束主动支链(I)分别设置在固定平台(1)和动平台(2)的四个顶角处,且连接固定平台(1)、动平台(2)。本发明中的无约束主动支链对动平台仅提供驱动,恰约束主动支链对动平台既提供驱动,又提供约束,且自由度数目与类型与动平台的自由度和类型相同,动平台可实现空间三个方向的转动和一个方向的移动。本发明具有结构简单,容易控制的优点。
技术研发人员:杨伟,程军周,马伟然,张镭,闫玉平
受保护的技术使用者:中国重型机械研究院股份公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!