一种栈板物料围板的自动拆卸及安装机械手的制作方法
本发明属于栈板物料围板机械手,具体涉及一种栈板物料围板的自动拆卸及安装机械手。
背景技术:
1、栈板是一种重要的物流工具,它被广泛应用于运输、存储和分配各种货物。在物流过程中,栈板物料的围板是栈板的关键部分,围板的安装和拆卸一直是一个耗时且人力成本较高的过程。传统的围板安装和拆卸方法通常需要机械手进行操作。传统的机械手末端工具的磨损往往会导致机械手的操作失误、故障等问题,而为了避免这种问题的发生,通常需要定期更换末端工具。
2、现有的机械手末端工具拆卸与安装方式,多为固定方式,连接部大多并不能转动,不能适应不同的安装使用方式,造成在不同的在安装方式要按照既定的位置进行拆卸或安装作业,若是拆卸或安装的角度发生偏差,造成连接的位置处接头出现损坏,造成拆卸或安装出现异常,影响装置的使用,降低了使用的寿命。
3、如中国专利公告号cn106348009b,公开了一种栈板抓取机构及能抓取栈板的机械手,使抓取机构固定在w轴旋转机构上,并不快速地拆卸或安装,使得拆卸或安装的角度发生偏差,造成连接的位置处接头出现损坏,造成拆卸或安装出现异常,影响装置的使用,降低了使用的寿命。
4、再如中国专利公告号cn112775994b,公开了一种便于更换不同夹头的机械手,利用该机械手末端地快速更换结构能够快速稳定地完成末端安装模块的更换过程,但是,在安装后,并不能够在连接处进行转动,且若拆卸或安装的角度发生偏差,造成连接的位置处接头出现损坏,造成拆卸或安装出现异常,影响装置的使用,降低了使用的寿命。
技术实现思路
1、本发明的目的是提供一种栈板物料围板的自动拆卸及安装机械手,能够快速稳定地完成末端机械手工具与支撑杆固定连接,使得安装时可多角度地进行安装作业,避免连接的位置处接头出现损坏,提升安装的效率,提升使用的寿命。
2、本发明采取的技术方案具体如下:
3、一种栈板物料围板的自动拆卸及安装机械手,包括:
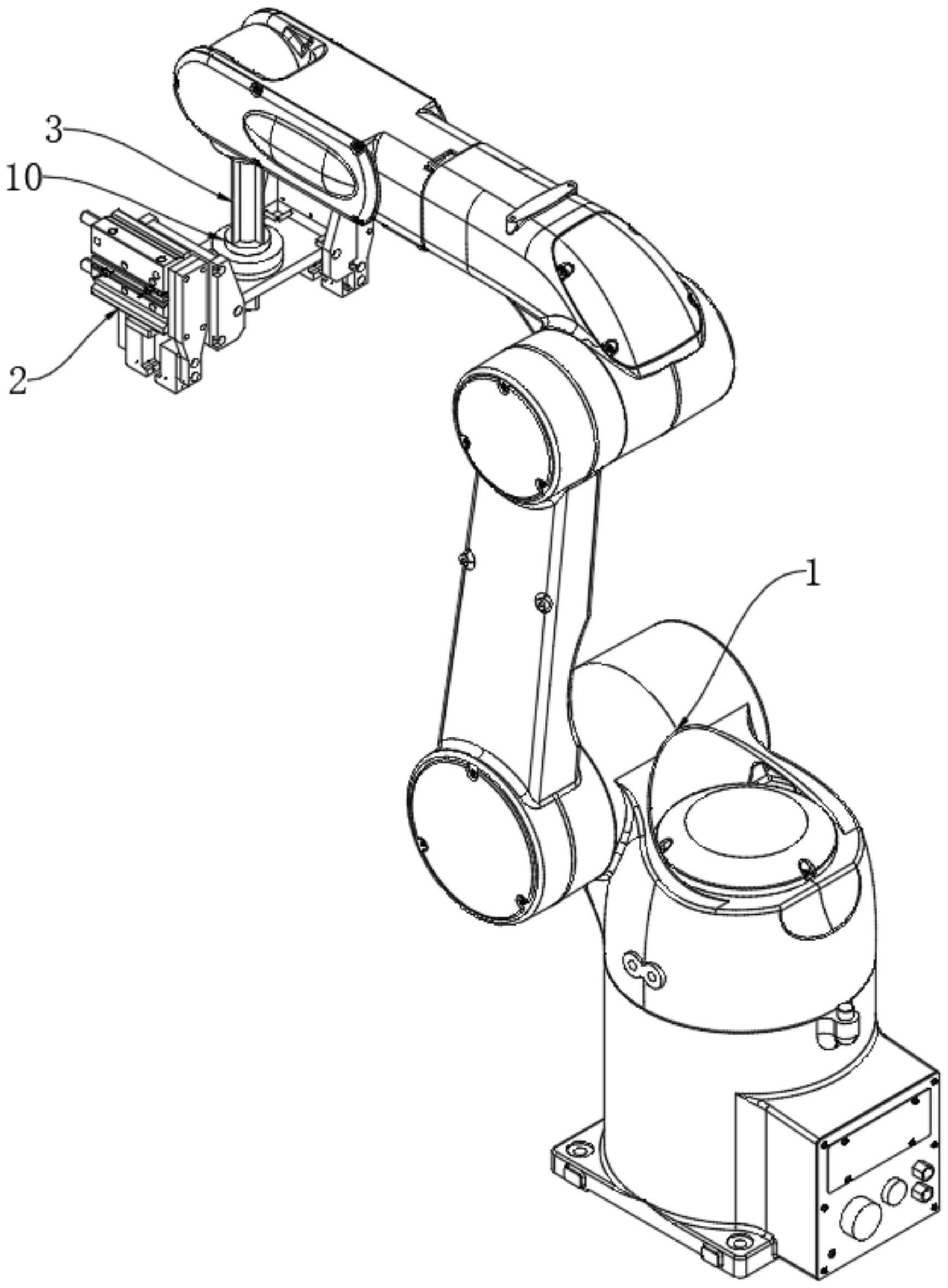
4、机械臂,所述机械臂的一端安装有末端机械手工具,所述末端机械手工具的一端安装有支撑杆,且所述支撑杆与末端机械手工具转动连接;
5、快接部,所述快接部设置在末端机械手工具与支撑杆之间,所述末端机械手工具通过快接部与支撑杆进行安装固定;
6、供气部,所述供气部安装在末端机械手工具与支撑杆的内部,所述供气部用于在末端机械手工具与支撑杆连接时对支撑杆进行供气;
7、供电部,所述供电部安装在末端机械手工具与支撑杆的内部且位于供气部的外侧,所述供电部用于在末端机械手工具与支撑杆连接时对支撑杆进行供电;
8、其中,在所述支撑杆安装在末端机械手工具上时,通过所述快接部将末端机械手工具与支撑杆进行连接固定,同时,通过所述供气部和供电部对支撑杆进行气路和电路的连接。
9、在一种优选方案中,所述快接部包括磁吸件和卡接件,所述磁吸件设置在末端机械手工具和支撑杆上,所述磁吸件用于将末端机械手工具和支撑杆进行连接,所述卡接件设置在末端机械手工具和支撑杆上,所述卡接件用于在末端机械手工具和支撑杆连接时并对末端机械手工具和支撑杆进行卡接。
10、在一种优选方案中,所述磁吸件包括电磁环a和环形磁铁a,所述电磁环a滑动连接在支撑杆的外侧,所述环形磁铁a转动连接在末端机械手工具的内部。
11、在一种优选方案中,所述卡接件包括固定环、弹簧a、倾斜环、多个卡球和卡环,所述固定环固定在支撑杆的下端,所述弹簧a设置在支撑杆的外侧且位于电磁环a与固定环之间,所述倾斜环固定在电磁环a的内部,所述卡球设置在固定环的内部,所述卡环固定在末端机械手工具上,所述卡球与卡环卡接。
12、在一种优选方案中,所述磁吸件包括电磁环b和环形磁铁b,所述电磁环b固定在支撑杆的外侧,所述环形磁铁b转动连接在末端机械手工具的内部。
13、在一种优选方案中,所述卡接件包括卡杆、转动球a、转动球b和压簧,所述卡杆转动连接在末端机械手工具的内部,所述转动球a转动连接在卡杆位于末端机械手工具外部的一端,所述转动球b转动连接在卡杆位于末端机械手工具内部的一端,所述压簧固定在末端机械手工具的内部且靠近卡杆的位置处。
14、在一种优选方案中,所述供气部包括供气管、连接管、限定环、圆台管a、弹簧b和圆台管b,所述供气管固定在支撑杆的内部,所述连接管滑动连接在供气管的内部,所述限定环固定在连接管的上端,且所述限定环与供气管活动连接,所述圆台管a固定在连接管的下端,所述弹簧b设置在连接管的外侧且位于供气管与圆台管a之间,所述圆台管b固定在末端机械手工具的内部且位于圆台管a的下方。
15、在一种优选方案中,所述供气管的下端且位于连接管的外侧转动连接有连接环,所述弹簧b的上端与连接环相接触。
16、在一种优选方案中,所述限定环的材质为橡胶,所述限定环与供气管过盈配合。
17、在一种优选方案中,所述供电部包括绝缘环a、导电管、导电球、导电帽、弹簧c、导电圈、绝缘环b和导电环,所述绝缘环a螺纹连接在支撑杆的下端,所述导电管固定在绝缘环a的内部,所述导电球设置在导电管的内部,所述导电帽螺纹连接在导电管远离导电球的一端,所述弹簧c设置在导电管的内部且位于导电球与导电帽之间,所述导电圈固定在导电帽远离导电管的一端,所述绝缘环b固定在末端机械手工具上且位于绝缘环a的下方,所述导电环固定在绝缘环b的内部。
18、本发明取得的技术效果为:
19、本发明,在支撑杆安装在末端机械手工具上时,通过快接部将末端机械手工具与支撑杆进行连接固定,同时,通过供气部和供电部对支撑杆进行气路和电路的连接,能够快速稳定地完成末端机械手工具与支撑杆的安装时,使得安装时可多角度地进行安装作业,避免连接的位置处接头出现损坏,提升安装的效率,提升使用的寿命;
20、本发明,通过快接部、供气部和供电部的结构设计,可在末端机械手工具和支撑杆的安装后,可使得末端机械手工具在支撑杆的下部转动,同时,在转动的同时可进行气路和电路的连接,可适用转动式的连接方式,提升了使用的便捷性。
技术特征:
1.一种栈板物料围板的自动拆卸及安装机械手,其特征在于,包括:
2.根据权利要求1所述的栈板物料围板的自动拆卸及安装机械手,其特征在于,所述快接部(10)包括磁吸件和卡接件,所述磁吸件设置在末端机械手工具(2)和支撑杆(3)上,所述磁吸件用于将末端机械手工具(2)和支撑杆(3)进行连接,所述卡接件设置在末端机械手工具(2)和支撑杆(3)上,所述卡接件用于在末端机械手工具(2)和支撑杆(3)连接时并对末端机械手工具(2)和支撑杆(3)进行卡接。
3.根据权利要求2所述的栈板物料围板的自动拆卸及安装机械手,其特征在于,所述磁吸件包括电磁环a(11)和环形磁铁a(17),所述电磁环a(11)滑动连接在支撑杆(3)的外侧,所述环形磁铁a(17)转动连接在末端机械手工具(2)的内部。
4.根据权利要求3所述的栈板物料围板的自动拆卸及安装机械手,其特征在于,所述卡接件包括固定环(12)、弹簧a(13)、倾斜环(14)、多个卡球(15)和卡环(16),所述固定环(12)固定在支撑杆(3)的下端,所述弹簧a(13)设置在支撑杆(3)的外侧且位于电磁环a(11)与固定环(12)之间,所述倾斜环(14)固定在电磁环a(11)的内部,所述卡球(15)设置在固定环(12)的内部,所述卡环(16)固定在末端机械手工具(2)上,所述卡球(15)与卡环(16)卡接。
5.根据权利要求2所述的栈板物料围板的自动拆卸及安装机械手,其特征在于,所述磁吸件包括电磁环b(111)和环形磁铁b(112),所述电磁环b(111)固定在支撑杆(3)的外侧,所述环形磁铁b(112)转动连接在末端机械手工具(2)的内部。
6.根据权利要求5所述的栈板物料围板的自动拆卸及安装机械手,其特征在于,所述卡接件包括卡杆(113)、转动球a(114)、转动球b(115)和压簧(116),所述卡杆(113)转动连接在末端机械手工具(2)的内部,所述转动球a(114)转动连接在卡杆(113)位于末端机械手工具(2)外部的一端,所述转动球b(115)转动连接在卡杆(113)位于末端机械手工具(2)内部的一端,所述压簧(116)固定在末端机械手工具(2)的内部且靠近卡杆(113)的位置处。
7.根据权利要求1所述的栈板物料围板的自动拆卸及安装机械手,其特征在于,所述供气部(20)包括供气管(21)、连接管(22)、限定环(23)、圆台管a(24)、弹簧b(25)和圆台管b(26),所述供气管(21)固定在支撑杆(3)的内部,所述连接管(22)滑动连接在供气管(21)的内部,所述限定环(23)固定在连接管(22)的上端,且所述限定环(23)与供气管(21)活动连接,所述圆台管a(24)固定在连接管(22)的下端,所述弹簧b(25)设置在连接管(22)的外侧且位于供气管(21)与圆台管a(24)之间,所述圆台管b(26)固定在末端机械手工具(2)的内部且位于圆台管a(24)的下方。
8.根据权利要求7所述的栈板物料围板的自动拆卸及安装机械手,其特征在于,所述供气管(21)的下端且位于连接管(22)的外侧转动连接有连接环,所述弹簧b(25)的上端与连接环相接触。
9.根据权利要求7所述的栈板物料围板的自动拆卸及安装机械手,其特征在于,所述限定环(23)的材质为橡胶,所述限定环(23)与供气管(21)过盈配合。
10.根据权利要求1所述的栈板物料围板的自动拆卸及安装机械手,其特征在于,所述供电部(30)包括绝缘环a(31)、导电管(32)、导电球(33)、导电帽(34)、弹簧c(35)、导电圈(36)、绝缘环b(37)和导电环(38),所述绝缘环a(31)螺纹连接在支撑杆(3)的下端,所述导电管(32)固定在绝缘环a(31)的内部,所述导电球(33)设置在导电管(32)的内部,所述导电帽(34)螺纹连接在导电管(32)远离导电球(33)的一端,所述弹簧c(35)设置在导电管(32)的内部且位于导电球(33)与导电帽(34)之间,所述导电圈(36)固定在导电帽(34)远离导电管(32)的一端,所述绝缘环b(37)固定在末端机械手工具(2)上且位于绝缘环a(31)的下方,所述导电环(38)固定在绝缘环b(37)的内部。
技术总结
本发明属于栈板物料围板机械手技术领域,具体涉及一种栈板物料围板的自动拆卸及安装机械手,该一种栈板物料围板的自动拆卸及安装机械手,包括机械臂、快接部、供气部和供电部,机械臂的一端安装有末端机械手工具。该发明,在支撑杆安装在末端机械手工具上时,通过快接部将末端机械手工具与支撑杆进行连接固定,同时,通过供气部和供电部对支撑杆进行气路和电路的连接,能够快速稳定地完成末端机械手工具与支撑杆的安装时,使得安装时可多角度地进行安装作业,避免连接的位置处接头出现损坏,提升安装的效率;通过快接部、供气部和供电部的结构设计,同时,在转动的同时可进行气路和电路的连接,可适用转动式的连接方式,提升了使用的便捷性。
技术研发人员:刘建云,马涛,张叶红
受保护的技术使用者:旭日东智能装备(广东)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!