一种丛林隐藏摄像用仿生蜥蜴拍摄机器人系统
本发明涉及仿生机械设备,具体为一种丛林隐藏摄像用仿生蜥蜴拍摄机器人系统。
背景技术:
1、现在国际上用于拍摄纪录片的方式有很多种,但由于拍摄的方式各不相同,拍摄时也会产生一定因素对自然环境等造成不同程度的破坏,纪录片的拍摄需要完全融入大自然的环境中,而不同的野生动物根据气候环境等因素有不同的习性,这对拍摄一部好的纪录片产生了很大的阻力,摄影师拍摄纪录片的拍摄方式易使摄影师在野外暴露在危险环境之中,同时需要摄影师在野外独自生存,这就会导致摄影师易在野外产生生活垃圾破坏生态环境,同时这种拍摄效率也较为低下,无人机在野外拍摄时有抗风能力较差、载重能力较小、续航时间较短,旋翼噪音较大容易惊扰动物的缺陷,故而导致其拍摄效率较为低下,拍摄不够灵活,同时现有动物间谍相机的拍摄活动多需要多人协作进行拍摄,需要的成本较高,因此需要设计一种丛林隐藏摄像用仿生蜥蜴拍摄机器人系统来解决上述出现的问题。
技术实现思路
1、本发明的目的在于提供一种丛林隐藏摄像用仿生蜥蜴拍摄机器人系统,以解决上述背景技术中提出无人机在野外拍摄时有抗风能力较差、载重能力较小、续航时间较短,旋翼噪音较大容易惊扰动物的缺陷,故而导致其拍摄效率较为低下,拍摄不够灵活,同时现有动物间谍相机的拍摄活动多需要多人协作进行拍摄,需要的成本较高的问题。
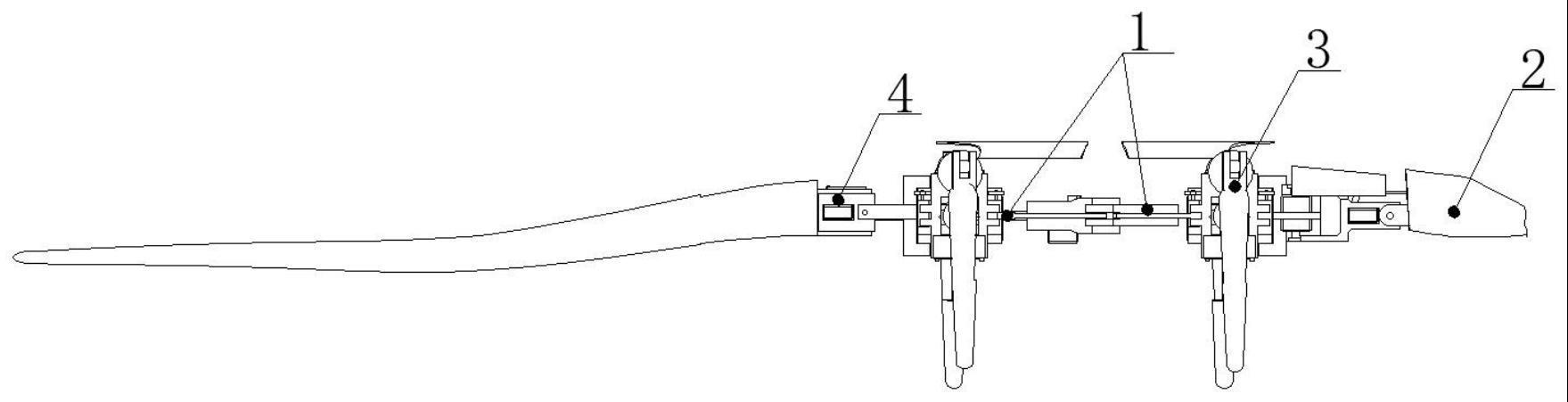
2、为实现上述目的,本发明提供如下技术方案:一种丛林隐藏摄像用仿生蜥蜴拍摄机器人系统,包括蜥蜴主板,所述蜥蜴主板的一端安装有头部拍摄机构,所述蜥蜴主板的两侧均安装有四个腿部运动机构,所述蜥蜴主板远离头部拍摄机构的一端安装有尾部平衡机构,所述蜥蜴主板包括蜥蜴前主板和蜥蜴后主板。
3、优选的,所述蜥蜴主板的内部安装有蜥蜴前主板,所述蜥蜴前主板的一侧安装有蜥蜴后主板,所述蜥蜴后主板的上方安装有蜥蜴主板连接销,所述蜥蜴前主板和蜥蜴后主板之间通过蜥蜴主板连接销行程铰链连接,所述蜥蜴前主板的内部开设有第一安装孔,所述第一安装孔的内部安装有蜥蜴前梁,所述蜥蜴后主板的内部开设有第二安装孔,所述第二安装孔的内部安装有蜥蜴后梁,所述第二安装孔的内部且远离蜥蜴后梁的一侧安装有偏置舵机,所述偏置舵机的内部开设有舵机臂孔,所述舵机臂孔的内部安装有拉杆,所述拉杆的一端通过间隙配合安装在偏置舵机的舵机臂孔内。
4、优选的,所述头部拍摄机构包括头部基座和头部横向摆动一节,所述蜥蜴主板的一端安装有头部基座,所述头部基座的内部开设有配合蜥蜴前梁使用的第一预留孔,所述头部基座远离蜥蜴主板的一侧安装有头部横向摆动一节,所述头部横向摆动一节的内部开设有第二预留孔,所述头部横向摆动一节远离头部基座的一侧安装有头部纵向摆动二节,所述头部纵向摆动二节的内部安装有第三预留孔,所述头部基座的内部开设有第一卡槽,所述第一卡槽的内部安装有第一头部偏置舵机,所述头部横向摆动一节的内部开设有第二卡槽,所述第二卡槽的内部安装有第二头部偏置舵机,所述头部横向摆动一节的内部开设有第一拉杆孔,所述第一拉杆孔的内部安装有头部拉杆,所述头部纵向摆动二节的内部开设有第二拉杆孔,所述第二拉杆孔的内部安装有头部摄像头。
5、优选的,所述腿部运动机构包括第一纵向运动舵机和腿部第二纵向运动舵机,所述蜥蜴主板的两侧均开设有舵机安装槽,所述舵机安装槽的内部依次安装有第一纵向运动舵机、腿部第二纵向运动舵机、腿部第一横向运动舵机和腿部第二横向运动舵机,所述舵机安装槽的内部开设有纵向滑槽和横向滑槽,所述纵向滑槽和横向滑槽的内部均安装有滑槽滑杆,所述舵机安装槽的外侧下部开设有第一对准孔,所述第一对准孔的内部安装有球头连杆,所述舵机安装槽的外侧上部开设有第二对准孔,所述第二对准孔的内部安装有无杆球头连杆。
6、优选的,所述球头连杆的内部安装有贯穿纵向滑槽和横向滑槽的大腿杆,所述大腿杆的一端均安装有大腿关节,所述大腿杆的一侧安装有从动杆,所述从动杆远离第一纵向运动舵机的一侧安装有从动杆接头,所述从动杆接头远离从动杆的一端安装有小腿关节杆,所述从动杆的一侧安装有小腿护甲,所述大腿杆的一侧安装有小腿外壳。
7、优选的,所述头部横向摆动一节的表面安装有颈部护甲,所述头部纵向摆动二节的表面安装有头部护甲,所述头部护甲的摄像口处安装有头部摄像头,所述头部摄像头的内部安装有图像传感器,所述头部纵向摆动二节的内部开设有第三卡槽。
8、优选的,所述尾部平衡机构包括尾部中置舵机和尾部根部,所述蜥蜴主板远离头部拍摄机构的一端安装有与蜥蜴后梁相连接的尾部基座,所述尾部基座的内部开设有第一预留槽,所述第一预留槽的内部安装有尾部中置舵机,所述尾部基座远离蜥蜴主板的一侧安装有尾部根部,所述尾部根部的内部开设有第二预留槽,所述尾部根部远离尾部中置舵机的一侧安装有尾部外壳,所述尾部外壳的内部开设有第三预留槽,所述尾部中置舵机的两侧均安装有尾部拉杆。
9、与现有技术相比,本发明的有益效果是:
10、1、利用自主设计的双滑槽机构以及平行四边机构来模仿蜥蜴腿部的运动动作,解决现有陆地动物间谍相机无法移动的弊端的同时更加真实的模仿蜥蜴的运动方式、动作以及骨骼关节,以达到更好的伪装效果;
11、2、通过将采用单侧偏置推挽机构结构来作为尾和头部转动结构,模仿蜥蜴尾部、颈部及头部的骨骼运动,使其转动更灵活真实,转动范围也较大,解决了无法与动物进行交流和做一些动作问题。同时通过将头部运动追踪模块与仿生动物相结合,操作者可通过转动头部控制仿生蜥蜴fpv视角的改变,解决了现有类相机拍摄角度单一问题。
技术特征:
1.一种丛林隐藏摄像用仿生蜥蜴拍摄机器人系统,包括蜥蜴主板(1),其特征在于:所述蜥蜴主板(1)的一端安装有头部拍摄机构(2),所述蜥蜴主板(1)的两侧均安装有四个腿部运动机构(3),所述蜥蜴主板(1)远离头部拍摄机构(2)的一端安装有尾部平衡机构(4),所述蜥蜴主板(1)包括蜥蜴前主板(101)和蜥蜴后主板(102);所述蜥蜴主板(1)的内部安装有蜥蜴前主板(101),所述蜥蜴前主板(101)的一侧安装有蜥蜴后主板(102),所述蜥蜴后主板(102)的上方安装有蜥蜴主板连接销(105),所述蜥蜴前主板(101)和蜥蜴后主板(102)之间通过蜥蜴主板连接销(105)行程铰链连接,所述蜥蜴前主板(101)的内部开设有第一安装孔,所述第一安装孔的内部安装有蜥蜴前梁(103),所述蜥蜴后主板(102)的内部开设有第二安装孔,所述第二安装孔的内部安装有蜥蜴后梁(104),所述第二安装孔的内部且远离蜥蜴后梁(104)的一侧安装有偏置舵机(106),所述偏置舵机(106)的内部开设有舵机臂孔,所述舵机臂孔的内部安装有拉杆(107),所述拉杆(107)的一端通过间隙配合安装在偏置舵机(106)的舵机臂孔内。
2.根据权利要求1所述的丛林隐藏摄像用仿生蜥蜴拍摄机器人系统,其特征在于:所述头部拍摄机构(2)包括头部基座(201)和头部横向摆动一节(202),所述蜥蜴主板(1)的一端安装有头部基座(201),所述头部基座(201)的内部开设有配合蜥蜴前梁(103)使用的第一预留孔,所述头部基座(201)远离蜥蜴主板(1)的一侧安装有头部横向摆动一节(202),所述头部横向摆动一节(202)的内部开设有第二预留孔,所述头部横向摆动一节(202)远离头部基座(201)的一侧安装有头部纵向摆动二节(203),所述头部纵向摆动二节(203)的内部安装有第三预留孔。
3.根据权利要求2所述的丛林隐藏摄像用仿生蜥蜴拍摄机器人系统,其特征在于:所述头部基座(201)的内部开设有第一卡槽,所述第一卡槽的内部安装有第一头部偏置舵机(204),所述头部横向摆动一节(202)的内部开设有第二卡槽,所述第二卡槽的内部安装有第二头部偏置舵机(205)。
4.根据权利要求2所述的丛林隐藏摄像用仿生蜥蜴拍摄机器人系统,其特征在于:所述头部横向摆动一节(202)的内部开设有第一拉杆孔,所述第一拉杆孔的内部安装有头部拉杆(206),所述头部纵向摆动二节(203)的内部开设有第二拉杆孔,所述第二拉杆孔的内部安装有头部摄像头(207)。
5.根据权利要求1所述的丛林隐藏摄像用仿生蜥蜴拍摄机器人系统,其特征在于:所述腿部运动机构(3)包括第一纵向运动舵机(301)和腿部第二纵向运动舵机(302),所述蜥蜴主板(1)的两侧均开设有舵机安装槽(305),所述舵机安装槽(305)的内部依次安装有第一纵向运动舵机(301)、腿部第二纵向运动舵机(302)、腿部第一横向运动舵机(303)和腿部第二横向运动舵机(304)。
6.根据权利要求5所述的丛林隐藏摄像用仿生蜥蜴拍摄机器人系统,其特征在于:所述舵机安装槽(305)的内部开设有纵向滑槽(306)和横向滑槽(307),所述纵向滑槽(306)和横向滑槽(307)的内部均安装有滑槽滑杆(308),所述舵机安装槽(305)的外侧下部开设有第一对准孔,所述第一对准孔的内部安装有球头连杆(309),所述舵机安装槽(305)的外侧上部开设有第二对准孔,所述第二对准孔的内部安装有无杆球头连杆(310)。
7.根据权利要求6所述的丛林隐藏摄像用仿生蜥蜴拍摄机器人系统,其特征在于:所述球头连杆(309)的内部安装有贯穿纵向滑槽(306)和横向滑槽(307)的大腿杆(311),所述大腿杆(311)的一端均安装有大腿关节(312),所述大腿杆(311)的一侧安装有从动杆(313),所述从动杆(313)远离第一纵向运动舵机(301)的一侧安装有从动杆接头(314),所述从动杆接头(314)远离从动杆(313)的一端安装有小腿关节杆(315),所述从动杆(313)的一侧安装有小腿护甲(317),所述大腿杆(311)的一侧安装有小腿外壳(316)。
8.根据权利要求3所述的丛林隐藏摄像用仿生蜥蜴拍摄机器人系统,其特征在于:所述头部横向摆动一节(202)的表面安装有颈部护甲(209),所述头部纵向摆动二节(203)的表面安装有头部护甲(210),所述头部护甲(210)的摄像口处安装有头部摄像头(207),所述头部摄像头(207)的内部安装有图像传感器(208),所述头部纵向摆动二节(203)的内部开设有第三卡槽。
9.根据权利要求1所述的丛林隐藏摄像用仿生蜥蜴拍摄机器人系统,其特征在于:所述尾部平衡机构(4)包括尾部中置舵机(401)和尾部根部(402),所述蜥蜴主板(1)远离头部拍摄机构(2)的一端安装有与蜥蜴后梁(104)相连接的尾部基座(405),所述尾部基座(405)的内部开设有第一预留槽,所述第一预留槽的内部安装有尾部中置舵机(401),所述尾部基座(405)远离蜥蜴主板(1)的一侧安装有尾部根部(402)。
10.根据权利要求9所述的丛林隐藏摄像用仿生蜥蜴拍摄机器人系统,其特征在于:所述尾部根部(402)的内部开设有第二预留槽,所述尾部根部(402)远离尾部中置舵机(401)的一侧安装有尾部外壳(403),所述尾部外壳(403)的内部开设有第三预留槽,所述尾部中置舵机(401)的两侧均安装有尾部拉杆(404)。
技术总结
本发明公开了一种丛林隐藏摄像用仿生蜥蜴拍摄机器人系统,涉及仿生机械设备技术领域,包括蜥蜴主板,所述蜥蜴主板的一端安装有头部拍摄机构,所述蜥蜴主板的两侧均安装有四个腿部运动机构,本发明有益增效:利用自主设计的双滑槽机构以及平行四边机构来模仿蜥蜴腿部的运动动作,解决现有陆地动物间谍相机无法移动的弊端的同时更加真实的模仿蜥蜴的运动方式、动作以及骨骼关节,模仿蜥蜴尾部、颈部及头部的骨骼运动,使其转动更灵活真实,转动范围也较大,解决了无法与动物进行交流和做一些动作问题,同时通过将头部运动追踪模块与仿生动物相结合,操作者可通过转动头部控制仿生蜥蜴FPV视角的改变,解决了现有类相机拍摄角度单一问题。
技术研发人员:贺莹,刘鑫瑞,闫奕涵,李旭,闫振宇,许秉维,孙江
受保护的技术使用者:天津仁爱学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!