一种安装位姿自适应型工业机器人关节润滑结构的制作方法
本发明属于机器人,特别涉及一种安装位姿自适应型工业机器人关节润滑结构。
背景技术:
1、目前,随着工业机器人向更多领域扩展,机器人安装形式不仅仅局限于正装、倒装及侧装,还有安装在移动车上或变位机上,导致一次工艺流程使工业机器人的一轴的轴指向空间随机位置变化。然而,在工业机器人的一轴的轴向指向空间方向不同时,工业机器人专用减速机在需要使用润滑要求是不同的,这样使工业机器人专用减速机在各空间方向的润滑不是很理想,不能满足润滑的工艺要求。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种安装位姿自适应型工业机器人关节润滑结构,以解决现有工业机器人专用减速机在各空间方向的润滑不是很理想,不能满足润滑工艺要求的问题。
2、为了实现上述目的,本发明采用以下技术方案:
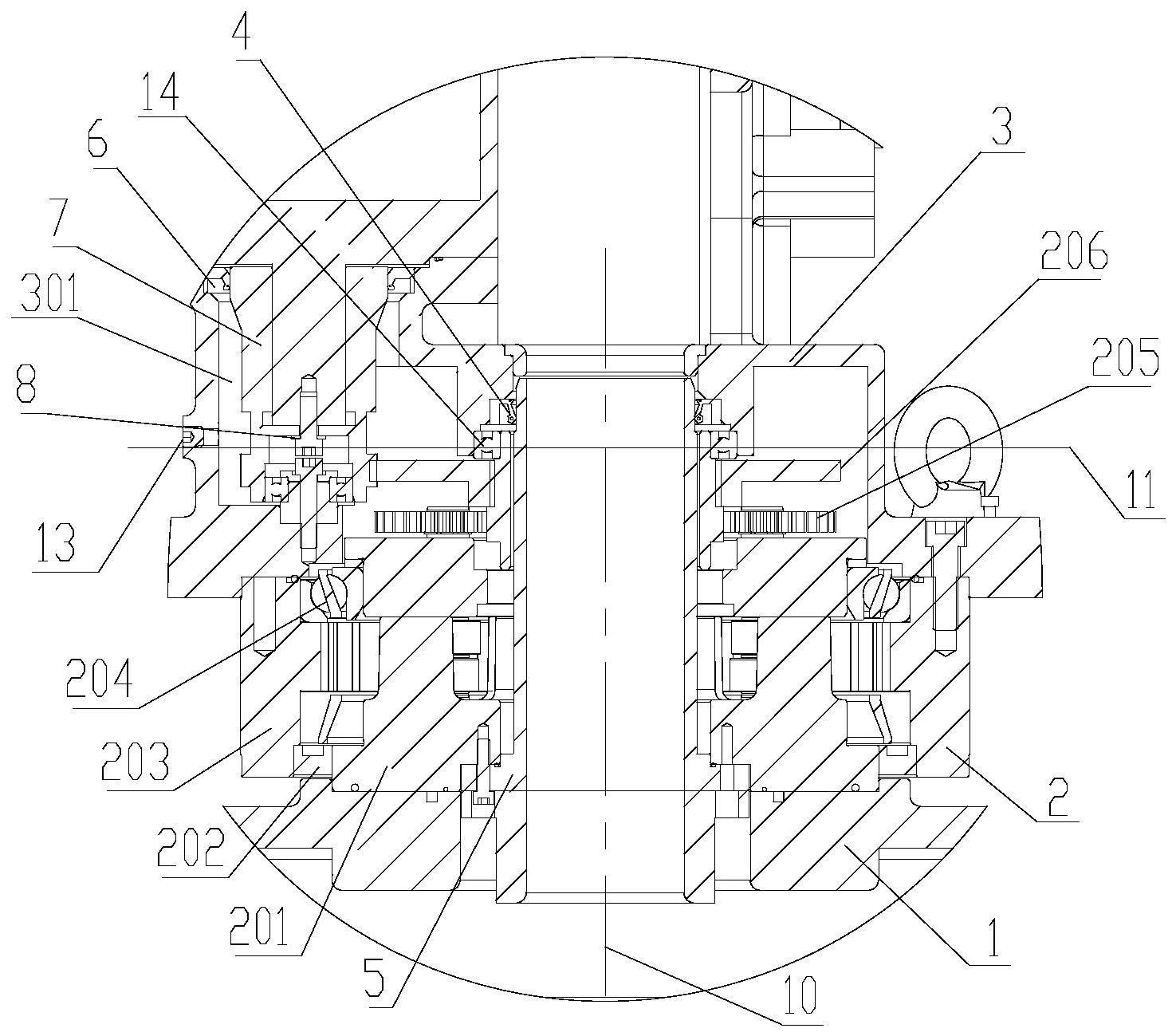
3、本发明提供一种安装位姿自适应型工业机器人关节润滑结构,包括中心筒及依次同轴安装在中心筒上的底座、减速机和腰座,其中腰座与减速机的输出端连接,减速机驱动腰座能够相对中心筒旋转;底座设有底座腔,腰座设有腰座内腔,底座腔和腰座内腔均与减速机的内腔连通,且形成封闭腔,封闭腔内注入润滑油。
4、在一种可能实现的方式中,所述底座上的底座腔的数量为多个,且沿周向布置,相邻两个所述底座腔之间通过底座通道连通。
5、在一种可能实现的方式中,所述底座的顶部为与所述减速机定位连接的安装面,所述底座通道为设置于安装面上的弧形槽。
6、在一种可能实现的方式中,所述底座的底部设有底板,所述底座的侧壁设有与一所述底座腔连通的注油通道。
7、在一种可能实现的方式中,所述减速机包括减速机外壳及设置于减速机外壳内的减速机芯轴和行星减速齿轮机构,其中减速机芯轴套装在所述中心筒上,且与所述中心筒固定连接,减速机芯轴和所述减速机外壳之间通过减速机轴承转动连接,且通过减速机密封圈旋转密封;减速机芯轴上设有用于连通所述底座腔和所述腰座内腔的通道,行星减速齿轮机构的输出端与减速机外壳传动连接。
8、在一种可能实现的方式中,所述中心筒的下端与所述减速机芯轴静密封连接,所述中心筒的上端通过中心筒旋转密封与所述腰座旋转密封连接。
9、在一种可能实现的方式中,所述腰座上通过电机旋转密封安装有减速机输入轴,减速机输入轴容置于所述腰座内腔内且与所述行星减速齿轮机构的输入端连接,所述行星减速齿轮机构将减速机输入轴的动力传递给所述减速机外壳,使所述减速机外壳转动。
10、在一种可能实现的方式中,所述减速机芯轴上沿周向设有多个沉头通孔,所述底座上沿周向设有多个螺纹孔,所述减速机芯轴通过贯穿沉头通孔的螺栓与所述底座上的螺纹孔螺纹连接。
11、在一种可能实现的方式中,所述腰座上沿周向设有多个连接沉孔,所述减速机外壳的上端面设有与所述腰座上的连接沉孔一一对应的螺纹盲孔,相对应的连接沉孔与螺纹盲孔通过螺钉连接。
12、在一种可能实现的方式中,所述腰座的上设有与所述腰座内腔连通的放气孔,放气孔通过放气螺钉封堵。
13、本发明的优点及有益效果是:本发明提供的一种安装位姿自适应型工业机器人关节润滑结构,能自适应机器人安装形式,不仅仅局限于正装、倒装及侧装,还适合安装在移动车及变位机上,在一次工艺流程中工业机器人的一轴的轴指向空间随机位置变化时,能够保证良好润滑,自适应强,应用范围广。
14、本发明提供的一种安装位姿自适应型工业机器人关节润滑结构,从末端到底座顺序安装,顺序拆卸,维护便利性高,符合人机工程学;对于腰座、一轴减速机、底座质量较大,不便于人工操作的情况下,均可从远离底座端顺序拆解。
15、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书以及附图中所特别指出的结构来实现和获得。
16、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种安装位姿自适应型工业机器人关节润滑结构,其特征在于,包括中心筒(5)及依次同轴安装在中心筒(5)上的底座(1)、减速机(2)和腰座(3),其中腰座(3)与减速机(2)的输出端连接,减速机(2)驱动腰座(3)能够相对中心筒(5)旋转;底座(1)设有底座腔(104),腰座(3)设有腰座内腔(301),底座腔(104)和腰座内腔(301)均与减速机(2)的内腔连通,且形成封闭腔,封闭腔内注入润滑油。
2.根据权利要求1所述的安装位姿自适应型工业机器人关节润滑结构,其特征在于,所述底座(1)上的底座腔(104)的数量为多个,且沿周向布置,相邻两个所述底座腔(104)之间通过底座通道(105)连通。
3.根据权利要求2所述的安装位姿自适应型工业机器人关节润滑结构,其特征在于,所述底座(1)的顶部为与所述减速机(2)定位连接的安装面(102),所述底座通道(105)为设置于安装面(102)上的弧形槽。
4.根据权利要求2所述的安装位姿自适应型工业机器人关节润滑结构,其特征在于,所述底座(1)的底部设有底板(106),所述底座(1)的侧壁设有与一所述底座腔(104)连通的注油通道(101)。
5.根据权利要求1所述的安装位姿自适应型工业机器人关节润滑结构,其特征在于,所述减速机(2)包括减速机外壳(203)及设置于减速机外壳(203)内的减速机芯轴(201)和行星减速齿轮机构,其中减速机芯轴(201)套装在所述中心筒(5)上,且与所述中心筒(5)固定连接,减速机芯轴(201)和所述减速机外壳(203)之间通过减速机轴承(204)转动连接,且通过减速机密封圈(202)旋转密封;减速机芯轴(201)上设有用于连通所述底座腔(104)和所述腰座内腔(301)的通道(207),行星减速齿轮机构的输出端与减速机外壳(203)传动连接。
6.根据权利要求5所述的安装位姿自适应型工业机器人关节润滑结构,其特征在于,所述中心筒(5)的下端与所述减速机芯轴(201)静密封连接,所述中心筒(5)的上端通过中心筒旋转密封(4)与所述腰座(3)旋转密封连接。
7.根据权利要求5所述的安装位姿自适应型工业机器人关节润滑结构,其特征在于,所述腰座(3)上通过电机旋转密封(6)安装有减速机输入轴(7),减速机输入轴(7)容置于所述腰座内腔(301)内且与所述行星减速齿轮机构的输入端连接,所述行星减速齿轮机构将减速机输入轴(7)的动力传递给所述减速机外壳(203),使所述减速机外壳(203)转动。
8.根据权利要求5所述的安装位姿自适应型工业机器人关节润滑结构,其特征在于,所述减速机芯轴(201)上沿周向设有多个沉头通孔,所述底座(1)上沿周向设有多个螺纹孔(103),所述减速机芯轴(201)通过贯穿沉头通孔的螺栓(9)与所述底座(1)上的螺纹孔(103)螺纹连接。
9.根据权利要求5所述的安装位姿自适应型工业机器人关节润滑结构,其特征在于,所述腰座(3)上沿周向设有多个连接沉孔,所述减速机外壳(203)的上端面设有与所述腰座(3)上的连接沉孔一一对应的螺纹盲孔,相对应的连接沉孔与螺纹盲孔通过螺钉连接。
10.根据权利要求1所述的安装位姿自适应型工业机器人关节润滑结构,其特征在于,所述腰座(3)的上设有与所述腰座内腔(301)连通的放气孔,放气孔通过放气螺钉(13)封堵。
技术总结
本发明属于机器人技术领域,特别涉及一种安装位姿自适应型工业机器人关节润滑结构。包括中心筒及依次同轴安装在中心筒上的底座、减速机和腰座,其中腰座与减速机的输出端连接,减速机驱动腰座能够相对中心筒旋转;底座设有底座腔,腰座设有腰座内腔,底座腔和腰座内腔均与减速机的润滑腔连通。本发明能自适应机器人安装形式,不仅仅局限于正装、倒装及侧装,还适合安装在移动车及变位机上,在一次工艺流程中工业机器人的一轴的轴指向空间随机位置变化时,能够保证良好润滑,自适应强,应用范围广。
技术研发人员:马子良,孙宝龙,朱维金,马玉峰,景添奇
受保护的技术使用者:沈阳新松机器人自动化股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!