一种重负载工业机器人的五六轴结构的制作方法
本发明涉及机器人的,特别是涉及一种重负载工业机器人的五六轴结构。
背景技术:
1、在重负载机器人领域,为了降低手臂部位的电机的负载率,四五六轴一般采用电机后置结构以降低机器人末端重量,所以五六轴均采用锥齿轮结构进行传动。由于锥齿轮传动部件涉及到的结构件较多,最终导致加工以及装配累计偏差较大,无法满足锥齿轮传动所需的精度要求。而且重负载机器人的相关工件又大又重,加工精度又很难保证,导致锥齿轮结构的配合精度较差,容易造成锥齿轮配合间隙过小导致锥齿轮顶死以及锥齿轮配合间隙过大导致锥齿轮传动存在间隙问题,传统的五六轴结构内需要多次用垫片的形式去补充加工造成的偏差。比如输入轴和输出轴之间的需要通过精准的垫片厚度去调节其中的传动间隙,在调节中需要反复进行拆卸试验,后期出现松动后仍需拆卸维护。因此,传统的垫片调节方式存在前期调节繁琐、后期维护不便的缺陷。
技术实现思路
1、基于此,本发明的目的在于提供一种重负载工业机器人的五六轴结构,五轴输入齿轴和六轴输入齿轴采用一体套设结构,装配前检查输出端的尺寸情况,可以通过调节设置在五轴输入齿轴和六轴输入齿轴上的弹性件的张紧情况,同步对五六轴进行间隙调节,具有调试简单和维护方便的优点。
2、本发明是通过如下方案实现的:
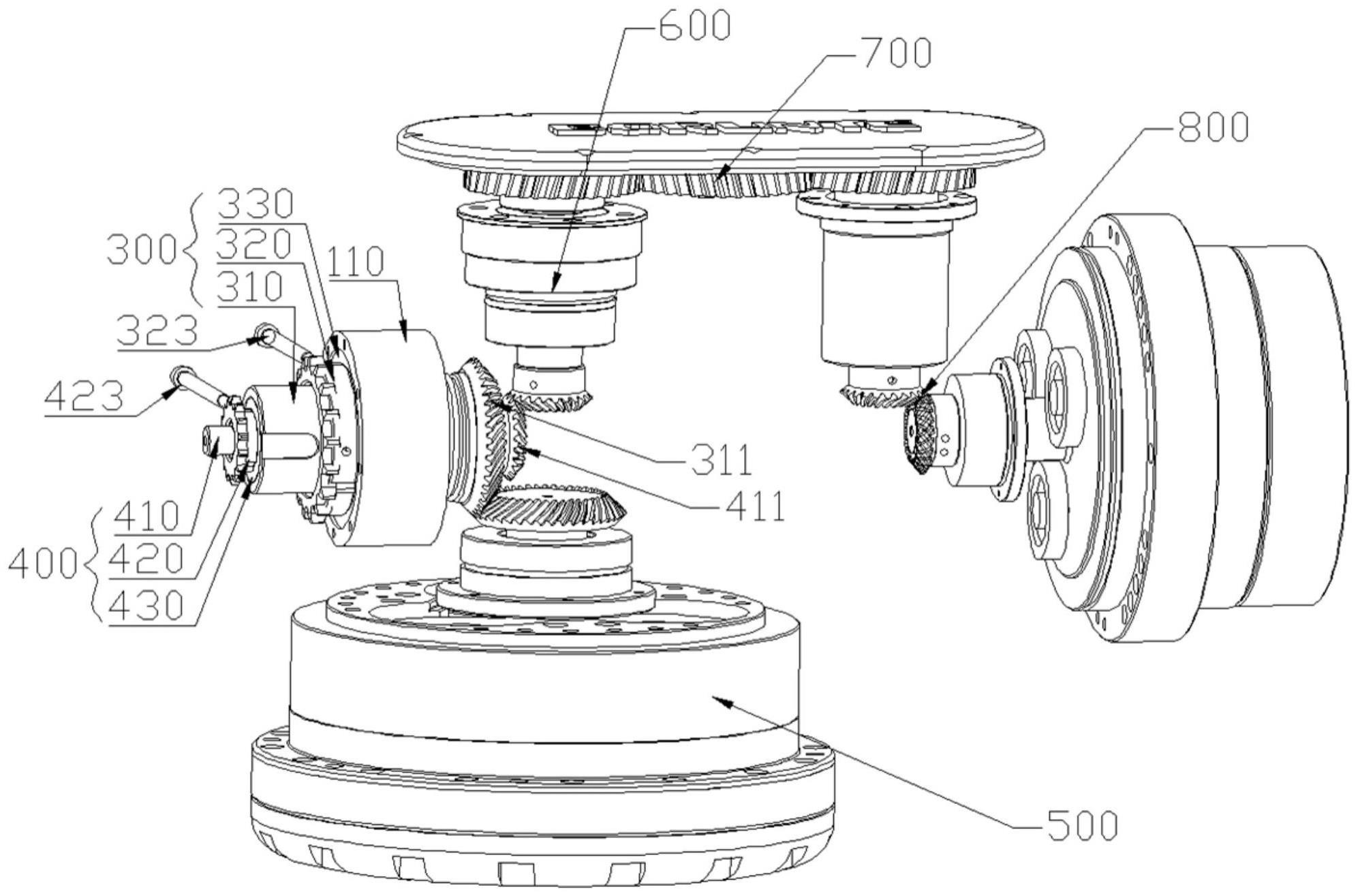
3、一种重负载工业机器人的五六轴结构,包括五轴本体、六轴本体、五轴输入机构、六轴输入机构、五轴输出机构和六轴第一输出机构,所述五轴输出机构和所述六轴第一输出机构分别设置于所述六轴本体的两侧内,所述五轴本体设置于所述五轴输出机构和所述六轴第一输出机构之间,所述五轴本体内可转动设置有所述五轴输入机构和所述六轴输入机构,且所述五轴输入机构套设于所述六轴输入机构上,所述五轴输入机构驱动所述五轴输出机构,所述六轴输入机构驱动所述六轴第一输出机构;
4、所述五轴输入机构包括五轴输入齿轴和五轴间隙调节组件,所述六轴输入机构包括六轴输入齿轴和六轴间隙调节组件,所述五轴输出机构包括五轴输出齿轴,所述六轴第一输出机构包括六轴输出齿轴,所述五轴间隙调节组件用于调节所述五轴输入齿轴和所述五轴输出齿轴之间的传动间隙,所述六轴间隙调节组件用于调节所述六轴输入齿轴和所述六轴输出齿轴之间的传动间隙。
5、进一步地,所述五轴输入齿轴在靠近所述五轴输出机构的一端设有第一圆锥齿轮;所述五轴输出机构包括五轴减速机和五轴输出齿轴,所述五轴输出齿轴的一端与所述五轴减速机的输出端连接,另一端上设有第二圆锥齿轮,所述五轴输入齿轴和所述五轴输出齿轴垂直设置,且所述第一圆锥齿轮和所述第二圆锥齿轮啮合传动。
6、进一步地,所述六轴输入齿轴在靠近所述六轴第一输出机构的一端设有第三圆锥齿轮;所述六轴输入齿轴和所述六轴输出齿轴垂直设置,且所述六轴输出齿轴的一端设有与所述第三圆锥齿轮啮合传动的第六圆锥齿轮;
7、还包括齿轮组件和六轴第二输出机构,所述六轴第二输出机构包括六轴减速机和六轴过渡轴,所述六轴输出齿轴相对所述第六圆锥齿轮的一端连接所述齿轮组件,所述齿轮组件还与所述六轴过渡轴的一端连接,所述六轴过渡轴的另一端设有第五圆锥齿轮,所述第五圆锥齿轮与所述六轴减速机上设有的第四圆锥齿轮啮合传动。
8、进一步地,所述五轴本体内腔固定设置有轴承固定板,所述轴承固定板内卡设有两个五轴轴承,所述五轴输入齿轴可滑动卡设在所述五轴轴承的内圈;
9、所述五轴输入齿轴为中空贯穿结构,所述五轴输入齿轴的中空腔内卡设有两个六轴轴承,所述六轴输入齿轴可滑动穿过所述六轴轴承的内圈设置。
10、进一步地,所述五轴间隙调节组件包括五轴弹性件和五轴调节件,在所述第一圆锥齿轮和所述五轴轴承之间设置所述五轴弹性件,所述五轴弹性件一端抵接所述五轴轴承,另一端抵接所述第一圆锥齿轮;
11、另一个所述五轴轴承在远离所述第一圆锥齿轮的一侧设置所述五轴调节件,所述五轴调节件通过螺纹安装于所述五轴输入齿轴上。
12、进一步地,所述六轴间隙调节组件包括六轴弹性件和六轴调节件,在所述第三圆锥齿轮和所述六轴轴承之间设置所述六轴弹性件,所述六轴弹性件一端抵接所述六轴轴承,另一端抵接所述第三圆锥齿轮;
13、另一个所述六轴轴承在远离所述第三圆锥齿轮的一侧设置所述六轴调节件,所述六轴调节件通过螺纹安装于所述六轴输入齿轴上。
14、进一步地,所述五轴间隙调节组件还包括五轴调节杆,所述五轴调节件的外表面设有齿牙,且所述五轴调节件设有用于锁紧的机米螺丝,所述五轴本体上设有第一开孔,所述五轴调节杆可通过所述第一开孔抵接所述五轴调节件的齿牙。
15、进一步地,所述六轴间隙调节组件还包括和六轴调节杆,所述六轴调节件的外表面设有齿牙,且所述六轴调节件设有用于锁紧的机米螺丝,所述五轴本体上设有第二开孔,所述六轴调节杆可通过所述第二开孔抵接所述六轴调节件的齿牙。
16、进一步地,所述五轴本体上还设有第一开口和第二开口,所述第一开口和所述第二开口对应所述五轴调节件和所述六轴调节件设置,所述第一开口和所述第二开口分别盖设有第一盖板和第二盖板。
17、进一步地,所述五轴弹性件为第一压缩弹簧,所述第一压缩弹簧套设于所述第一圆锥齿轮和所述五轴轴承之间,所述第一压缩弹簧的一端抵接所述五轴轴承,另一端抵接所述第一圆锥齿轮;
18、所述六轴弹性件为第二压缩弹簧,所述第二压缩弹簧套设于所述第三圆锥齿轮和所述六轴轴承之间,所述第二压缩弹簧一端抵接所述六轴轴承,另一端抵接所述第三圆锥齿轮。
19、本申请所述的一种重负载工业机器人的五六轴结构,具有以下有益效果:
20、1、五轴输入机构和六轴输入机构采用一体化结构设计,五轴输入机构和六轴输入机构在装配前检查五轴输出机构和六轴第一输出机构的尺寸情况,通过同时调节五轴间隙调节组件和六轴间隙调节组件,同步对五六轴进行间隙调节,具有调试简单的优点。
21、2、通过采用弹性件推动五轴输入齿轴和六轴输入齿轴从而调节五六轴之间的传动间隙,只要对弹性件进行计算选型,即可在装上前调节好传动间隙,无需使用垫片进行反复拆卸调试,使装配后的调试更为方便。
22、3、如果结构在后续使用过程中发生松动的情况,导致间隙和弹性件的弹力发生改变,无需对结构进行拆卸,使用五轴调节杆通过第一开孔推动五轴调节件的齿牙,或使用六轴调节杆通过第二开孔推动六轴调节件的齿牙,即可完成传动间隙和弹性件张紧力的调节,具有维护方便的优点。
23、4、使用压缩弹簧作为五轴弹性件和六轴弹性件,在机器人末端发生较大的冲击时,弹簧通过压缩,齿轮直接发生较小角度的位移缓冲,减少齿轮及其他工件发生硬性冲击,增加使用使用寿命。
技术特征:
1.一种重负载工业机器人的五六轴结构,其特征在于:
2.根据权利要求1所述的一种重负载工业机器人的五六轴结构,其特征在于:
3.根据权利要求2所述的一种重负载工业机器人的五六轴结构,其特征在于:
4.根据权利要求3所述的一种重负载工业机器人的五六轴结构,其特征在于:
5.根据权利要求4所述的一种重负载工业机器人的五六轴结构,其特征在于:
6.根据权利要求5所述的一种重负载工业机器人的五六轴结构,其特征在于:
7.根据权利要求6所述的一种重负载工业机器人的五六轴结构,其特征在于:
8.根据权利要求7所述的一种重负载工业机器人的五六轴结构,其特征在于:
9.根据权利要求7或8任一所述的一种重负载工业机器人的五六轴结构,其特征在于:
10.根据权利要求6-8任一所述的一种重负载工业机器人的五六轴结构,其特征在于:
技术总结
本发明涉及一种重负载工业机器人的五六轴结构。本发明所述的一种重负载工业机器人的五六轴结构包括分别设置于六轴本体的两侧内的五轴输出机构和六轴第一输出机构,设置于五轴输出机构和六轴第一输出机构之间的五轴本体,五轴本体内可转动设置有五轴输入机构和六轴输入机构,且五轴输入机构套设于六轴输入机构上,五轴输入机构驱动五轴输出机构,六轴输入机构驱动六轴第一输出机构;五轴输入机构设有五轴间隙调节组件,用于调节五轴输入齿轴和五轴输出齿轴之间的传动间隙,六轴输入机构设有六轴间隙调节组件,用于调节六轴输入齿轴和六轴输出齿轴之间的传动间隙。本发明所述的一种重负载工业机器人的五六轴结构具有调试简单和维护方便优点。
技术研发人员:周文
受保护的技术使用者:伯朗特机器人股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!