一种工业机器人手臂的旋转摆动机构的制作方法
本发明涉及工业机器人,具体为一种工业机器人手臂的旋转摆动机构。
背景技术:
1、工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
2、工业机器人拟人手臂、手腕和手功能的机械电子装置;它可把任一物件或工具按空间位姿(位置和姿态)的时变要求进行移动,从而完成某一工业生产的作业要求。如夹持焊钳或焊枪,对汽车或摩托车车体进行了点焊或弧焊;搬运压铸或冲压成型的零件或构件;进行激光切割;喷涂;装配机械零部件等等。
3、工业机器人在使用时根据使用的环境更多的是用到其旋转、摆动等功能的结构组合,例如中国专利申请号为cn201621312795.0涉及一种用于机器人手臂的旋转摆动机构、机器人手臂和机器人,所述旋转摆动机构包括:减速电机,其输出轴穿过第一连接盘固定连接旋转法兰,旋转法兰固定连接摆动支架,摆动支架上设有第一连接部和至少两个第二连接部。
4、其在使用时,多为电机进行驱动控制,当电机停止时,存在松动的情况,使得机械手臂出现角度变化等情况,使得加工精度降低,容易造成被加工物件受到机械手臂冲击而损坏。
技术实现思路
1、本发明的目的在于提供一种工业机器人手臂的旋转摆动机构,以解决上述背景技术中提出的现有一些机械手臂在使用时,多为电机进行驱动控制,当电机停止时,存在松动的情况,使得机械手臂出现角度变化等情况,使得加工精度降低,容易造成被加工物件受到机械手臂冲击而损坏的问题。
2、为实现上述目的,本发明提供如下技术方案:一种工业机器人手臂的旋转摆动机构,包括:
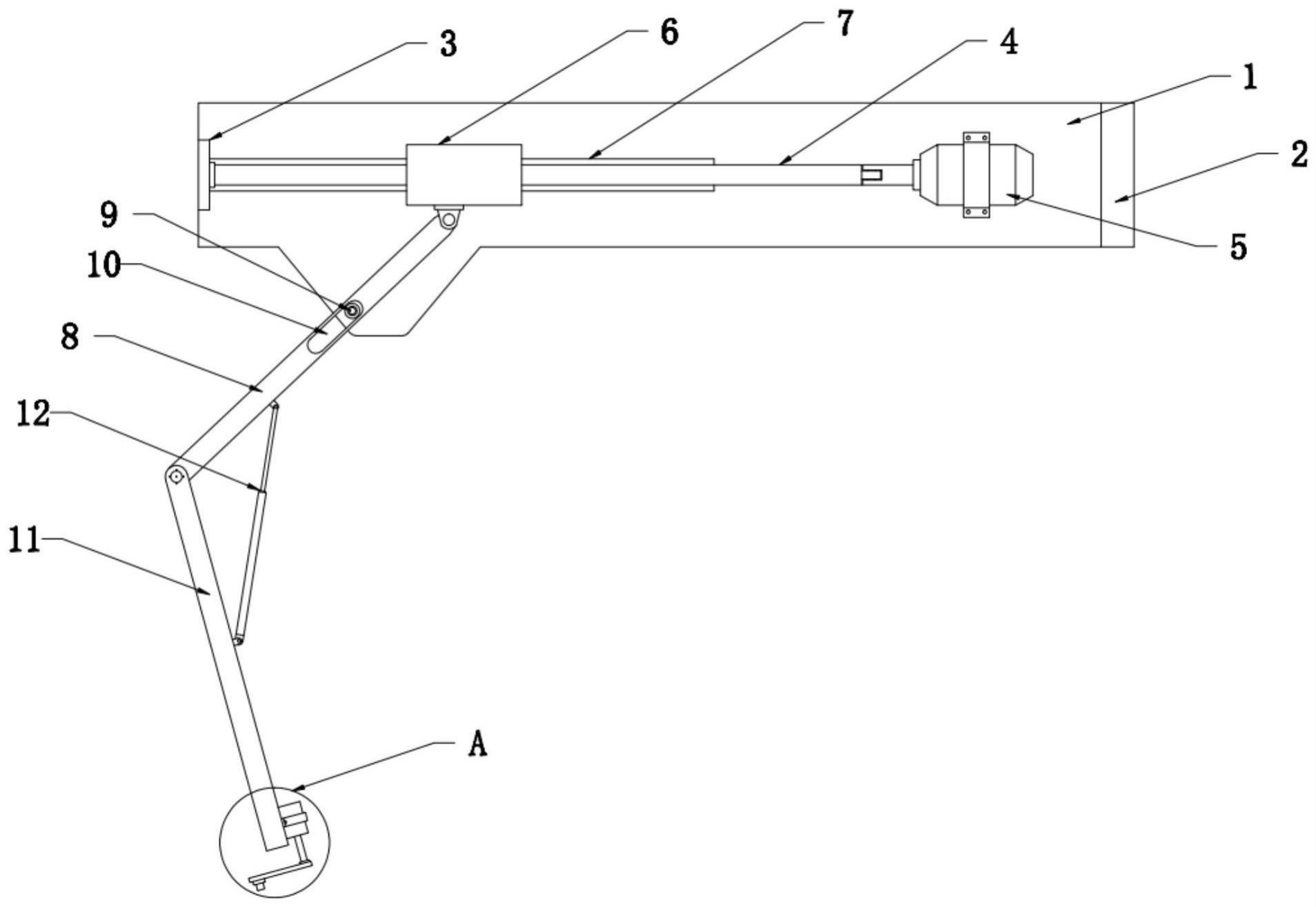
3、安装板,所述安装板的前壁右侧安装有驱动电机,所述驱动电机的输出轴左端通过联轴器连接有驱动丝杠,所述安装板的前壁左侧设置有支撑板,所述支撑板的右侧壁设置有轴承,所述轴承与驱动丝杠的左端转动连接;
4、固定设置在安装板前壁上的支撑滑槽,所述支撑滑槽的左端延伸至支撑板的右侧壁,且支撑滑槽位于驱动丝杠的后侧,在所述支撑滑槽内滑动连接有滑块,所述滑块的本体上横向开设有内螺孔,所述驱动丝杠贯穿滑块的内螺孔并与内螺孔之间螺纹连接;
5、安装在所述安装板左下侧的支撑导向柱,所述滑块的下表面通过销轴转动连接有上支臂,所述上支臂沿着上支臂的长度方向上开设有腰型槽,所述支撑导向柱位于腰型槽内,所述滑块横向移动时,驱动上支臂移动,受到支撑导向柱的限制作用,使得上支臂随着滑块的移动而摆动;
6、在所述上支臂的下侧通过转轴转动连接有下支臂,所述上支臂与下支臂之间设置有伸缩驱动机构,伸缩驱动机构的两端通过销轴分别与上支臂、下支臂的外壁转动连接,所述伸缩驱动机构伸长或缩短时驱动上支臂、下支臂之间展开或者靠拢;
7、设置在下支臂底端的旋转驱动马达,所述旋转驱动马达的输出轴下侧连接有夹持安装机构。
8、优选的,所述安装板的前壁右端且位于驱动电机的右侧设置有安装定位板,所述安装定位板上开设有用于对安装定位板固定的连接孔。
9、优选的,所述安装板的左下侧向下延伸形成下延板,所述支撑导向柱安装在下延板处。
10、优选的,所述伸缩驱动机构为伸缩气缸、伸缩液压缸或者电动伸缩杆。
11、优选的,所述支撑导向柱的外壁上安装有支撑轴承,所述支撑轴承支撑在腰型槽的内壁上。
12、优选的,所述夹持安装机构包括安装在旋转驱动马达输出轴上的承载板,所述承载板的一端上表面与旋转驱动马达的输出轴底端固定连接,所述承载板的另一端下表面设置有工具安装位。
13、与现有技术相比,本发明提出的一种工业机器人手臂的旋转摆动机构,至少具有以下有益效果:
14、1)该工业机器人手臂的旋转摆动机构通过驱动电机带动驱动丝杠转动,驱动丝杠与滑块的螺纹配合,对滑块驱动移动,由于驱动丝杠与滑块的螺纹配合连接,具有一定的自锁作用,当驱动丝杠停止转动时,滑块在驱动丝杠上不会自行移动,对于移动后的滑块具有锁止作用,从而使得上支臂的移动能够得到稳定,在对物品加工时,使得下侧的工具能够与物品准确对应;
15、2)上支臂和下支臂之间通过伸缩驱动机构进行驱动,使得上支臂和下支臂之间能够快速展开或者收拢,使得对下侧工具的快速大范围的移动。
16、3)在最下侧通过旋转驱动马达对夹持安装机构的驱动旋转,使得夹持安装机构上安装的工具进行小范围的旋转调整,对于小范围内不同位置的加工进行改变方位。
技术特征:
1.一种工业机器人手臂的旋转摆动机构,其特征在于,包括:
2.根据权利要求1所述的一种工业机器人手臂的旋转摆动机构,其特征在于:所述安装板(1)的前壁右端且位于驱动电机(5)的右侧设置有安装定位板(2),所述安装定位板(2)上开设有用于对安装定位板(2)固定的连接孔。
3.根据权利要求1所述的一种工业机器人手臂的旋转摆动机构,其特征在于:所述安装板(1)的左下侧向下延伸形成下延板,所述支撑导向柱(9)安装在下延板处。
4.根据权利要求1所述的一种工业机器人手臂的旋转摆动机构,其特征在于:所述伸缩驱动机构(12)为伸缩气缸、伸缩液压缸或者电动伸缩杆。
5.根据权利要求1所述的一种工业机器人手臂的旋转摆动机构,其特征在于:所述支撑导向柱(9)的外壁上安装有支撑轴承,所述支撑轴承支撑在腰型槽(10)的内壁上。
6.根据权利要求1所述的一种工业机器人手臂的旋转摆动机构,其特征在于:所述夹持安装机构包括安装在旋转驱动马达(13)输出轴上的承载板(14),所述承载板(14)的一端上表面与旋转驱动马达(13)的输出轴底端固定连接,所述承载板(14)的另一端下表面设置有工具安装位(15)。
技术总结
本发明属于工业机器人技术领域,具体为一种工业机器人手臂的旋转摆动机构,包括:安装板,所述安装板的前壁右侧安装有驱动电机,所述驱动电机的输出轴左端通过联轴器连接有驱动丝杠,所述安装板的前壁左侧设置有支撑板,所述支撑板的右侧壁设置有轴承,所述轴承与驱动丝杠的左端转动连接。该工业机器人手臂的旋转摆动机构通过驱动电机带动驱动丝杠转动,驱动丝杠与滑块的螺纹配合,对滑块驱动移动,由于驱动丝杠与滑块的螺纹配合连接,具有一定的自锁作用,当驱动丝杠停止转动时,滑块在驱动丝杠上不会自行移动,对于移动后的滑块具有锁止作用,从而使得上支臂的移动能够得到稳定,在对物品加工时,使得下侧的工具能够与物品准确对应。
技术研发人员:张胜利,穆雪
受保护的技术使用者:安徽数字星空工业技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!