管道机器人姿态稳定控制方法及系统
本发明涉及飞行器控制,特别涉及一种管道机器人姿态稳定控制方法及系统。
背景技术:
1、石油和天然气在国民经济中占据至关重要的地位,是工农业、国防、交通和人民日常生活的重要支撑,传输管道是石油化工厂和天然气加工厂的必备设施,长期接触有毒物质且暴露于自然环境中的传输管道极易被腐蚀降解,过度腐蚀将导致有毒物质泄露甚至爆炸,给工厂和生态环境带来灾难性后果。从工作人员安全、作业成本和作业质量方面考虑,利用由旋翼无人机和机械臂组成的空中操作机器人(unmanned aerial manipulator,uam)执行空中传输管道厚度测量和检测维修等作业任务将成为必然。
2、由于50%~90%的空中传输管道方向水平,利用uam系统执行空中传输管道检测维修作业的第一步是uam在传输管道表面的准确着陆,由于在停靠阶段初始时刻uam没有停靠于水平管道的正上方,需要补偿uam重力因素且避免uam在水平管道表面的滑动甚至失稳坠落,另外,制定空中水平传输管道上方uam稳定停靠的控制策略时,需要考虑uam系统物理参数不确定、外部噪声干扰、控制输入延迟等因素,并且需要构建防止空中操作机器人滑动或失稳坠落的静稳定性约束。
技术实现思路
1、本发明实施例提供了一种管道机器人姿态稳定控制方法及系统,用以解决旋翼无人机在空中管道上方稳定停靠着陆和作业的问题。
2、一方面,本发明实施例提供了一种管道机器人姿态稳定控制方法,包括:
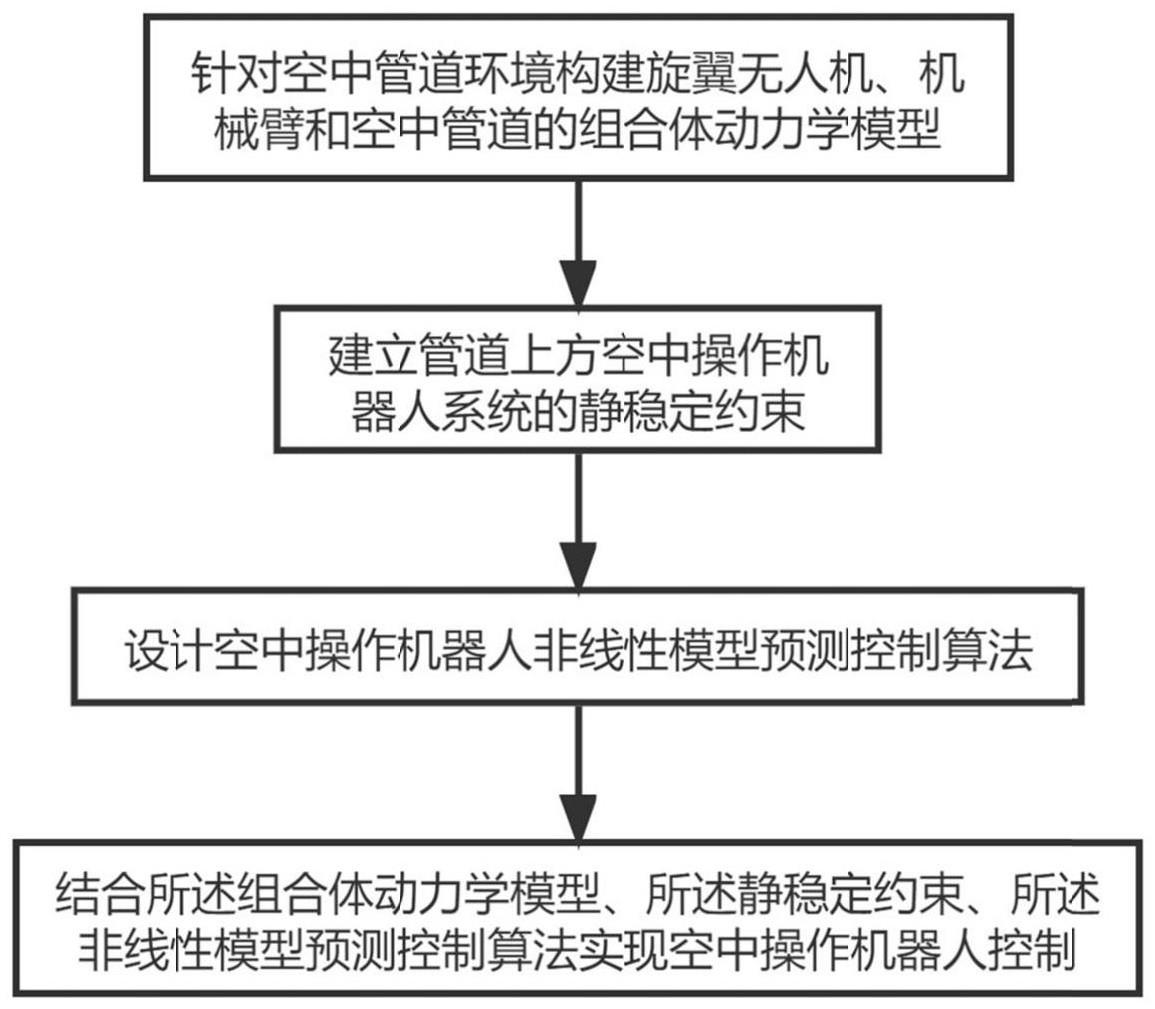
3、针对空中管道环境构建旋翼无人机、机械臂和空中管道的组合体动力学模型;
4、建立管道上方空中操作机器人系统的静稳定约束;
5、设计空中操作机器人非线性模型预测控制算法;
6、结合所述组合体动力学模型、所述静稳定约束、所述非线性模型预测控制算法实现空中操作机器人控制。
7、在一种可能的实现方式中,所述组合体动力学模型包括:
8、轮子处于固定位置、可以在管道上横向移动的模型;
9、围绕传输管道约束机器人运动的模型;
10、轮子和管道均为刚性,忽略二者之间的滚动摩擦的模型;
11、忽略轮子和旋翼的惯性的模型。
12、在一种可能的实现方式中,所述静稳定约束用于防止空中操作机器人滑动或失稳坠落。
13、在一种可能的实现方式中,所述空中操作机器人非线性模型预测控制算法包括机器人停靠阶段和停靠后机械臂运动阶段。
14、在一种可能的实现方式中,所述实现空中操作机器人控制是结合所述组合体动力学模型和所述静稳定约束后通过非线性模型预测控制算法设计控制器实现。
15、另一方面,本发明实施例提供了一种管道机器人姿态稳定控制系统,包括:
16、模型建立模块,用于针对空中管道环境构建旋翼无人机、机械臂和空中管道的组合体动力学模型;
17、稳定维持模块,用于建立管道上方空中操作机器人系统的静稳定约束;
18、控制设计模块,用于设计空中操作机器人非线性模型预测控制算法;
19、控制运行模块,用于结合所述组合体动力学模型、所述静稳定约束、所述非线性模型预测控制算法实现空中操作机器人控制。
20、本发明中的一种管道机器人姿态稳定控制方法及系统,具有以下优点:
21、(1)通过空中操作机器人系统代替人类执行高空复杂作业。
22、(2)贴合空中水平传输管道厚度测量、检测维修任务场景,实现了机器人的姿态稳定控制。
技术特征:
1.管道机器人姿态稳定控制方法,其特征在于,包括:
2.根据权利要求1所述的管道机器人姿态稳定控制方法,其特征在于,所述组合体动力学模型包括:
3.根据权利要求1所述的管道机器人姿态稳定控制方法,其特征在于,所述静稳定约束用于防止空中操作机器人滑动或失稳坠落。
4.根据权利要求1所述的管道机器人姿态稳定控制方法,其特征在于,所述空中操作机器人非线性模型预测控制算法包括机器人停靠阶段和停靠后机械臂运动阶段。
5.根据权利要求1所述的管道机器人姿态稳定控制方法,其特征在于,所述实现空中操作机器人控制是结合所述组合体动力学模型和所述静稳定约束后通过非线性模型预测控制算法设计控制器实现。
6.管道机器人姿态稳定控制系统,其特征在于,包括:
技术总结
本发明公开了一种管道机器人姿态稳定控制方法及系统,方法包括:针对空中管道环境构建旋翼无人机、机械臂和空中管道的组合体动力学模型;建立管道上方空中操作机器人系统的静稳定约束;设计空中操作机器人非线性模型预测控制算法;结合所述组合体动力学模型、所述静稳定约束、所述非线性模型预测控制算法实现空中操作机器人控制。本发明通过空中操作机器人系统代替人类执行高空复杂作业,贴合空中水平传输管道厚度测量、检测维修任务场景,实现了机器人的姿态稳定控制。
技术研发人员:赵素平,高嵩,陈超波,闫姣姣,阎坤,杜钰霜
受保护的技术使用者:西安工业大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!