一种垃圾分拣用机械手及分拣方法与流程
本发明涉及垃圾分拣,特别是涉及一种垃圾分拣用机械手。
背景技术:
1、在环卫垃圾的分拣处理中,由于垃圾袋内盛装有未进行干湿分离的垃圾,经常会面临垃圾袋中含有大量水分,水分被包裹在垃圾袋中,导致存在无法与垃圾分离的问题;
2、而目前的垃圾分拣用机械手仅仅具有垃圾抓取功能,无法在分拣抓取过程中将垃圾袋中的垃圾和垃圾袋中包裹的水分进行分离。
技术实现思路
1、本发明的目的在于克服以上所述的缺点,提供一种实现垃圾袋的抓取和脱水处理的垃圾分拣用机械手。
2、为实现上述目的,本发明的具体方案如下:
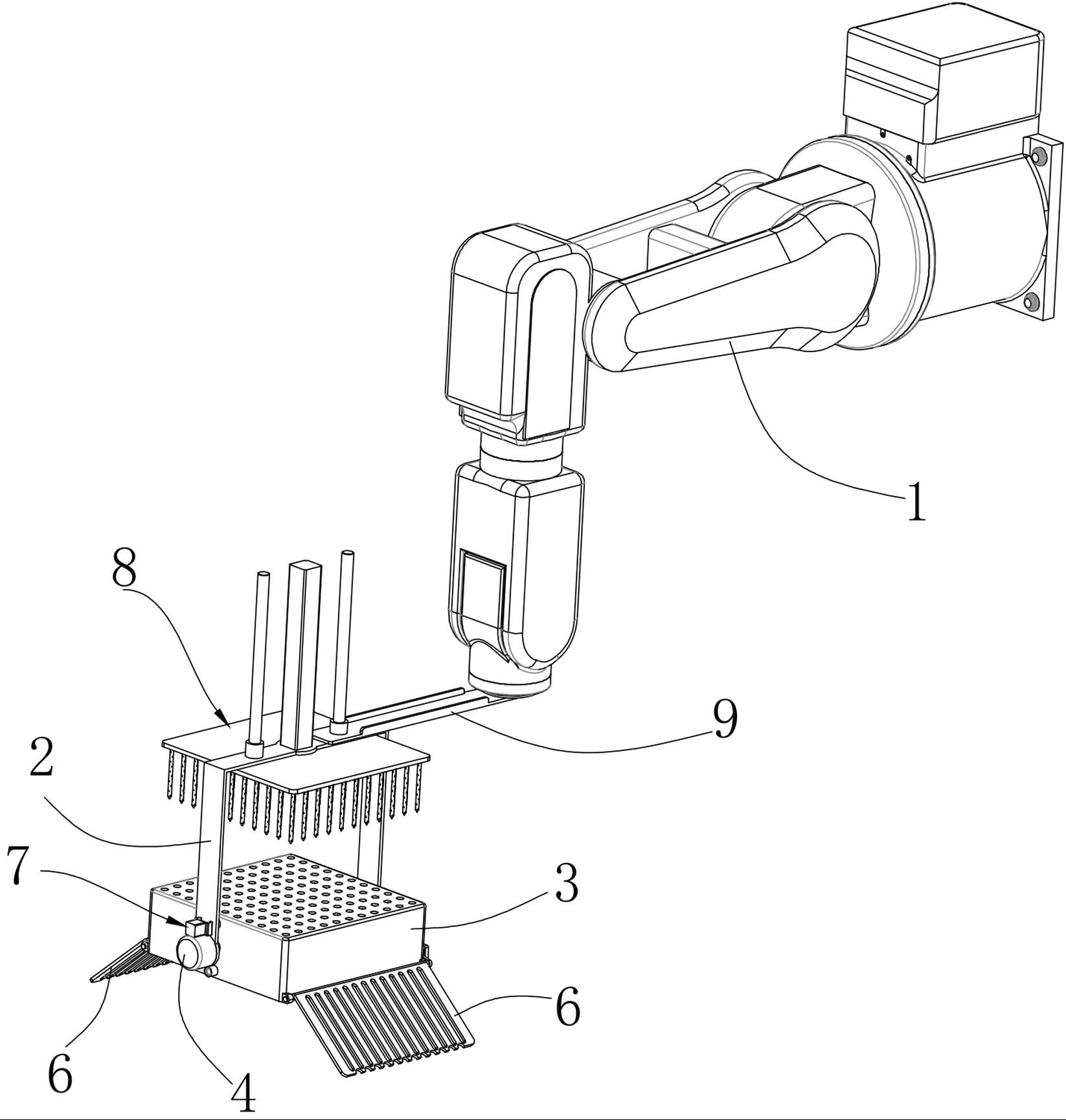
3、一种垃圾分拣用机械手及分拣方法,包括关节机械臂、龙门型支架、分离箱体、旋转驱动机构和开闭驱动机构;
4、所述龙门型支架连接于关节机械臂的输出端;
5、所述分离箱体转动连接于龙门型支架,所述分离箱体具有一开口,所述开口的两侧分别铰接有能够封盖开口的爪板,所述爪板上均布有透水条孔;所述分离箱体的底部均布有多个透水通孔;
6、所述旋转驱动机构连接于龙门型支架,并用于驱动分离箱体转动;
7、所述开闭驱动机构连接于分离箱体的一侧,并用于驱动两个爪板进行开闭动作。
8、本发明进一步地,所述分离箱体的底部还均布有多个锥形凸台,所述锥形凸台与透水通孔错开设置。
9、本发明进一步地,还包括有连接于龙门型支架一侧的锁止机构,所述分离箱体与锁止机构对应的一侧间隔设有两个上下对称的定位筒;所述锁止机构与定位筒配合时对分离箱体进行锁止。
10、本发明进一步地,所述锁止机构包括有锁止支座、锁止推杆和锁止销,所述锁止支座固定在龙门型支架上,所述锁止推杆安装在锁止支座上,所述锁止销活动贯穿于龙门型支架,所述锁止销的一端与锁止推杆的输出端连接。
11、本发明进一步地,所述爪板一侧的两端分别凸设有铰接轴,所述分离箱体对应设有凸耳,所述铰接轴铰接在对应的凸耳上;所述开闭驱动机构包括开闭推杆、两个推块和两个连接杆,两个所述推块对称滑动连接在分离箱体上,所述开闭推杆的固定端连接在一个推块的一端上,所述开闭推杆的输出端连接在另一个推块的一端上,所述连接杆的一端连接在爪板的铰接轴上,所述连接杆的另一端凸设有销轴,所述推块的另一端开设有条形孔,所述销轴活动卡入对应的条形孔内。
12、本发明进一步地,所述爪板的另一侧间隔设有多个半圆弧缺口。
13、本发明进一步地,还包括有设于龙门型支架顶部的挤压机构,所述挤压机构包括有挤压板和挤压推杆,所述挤压推杆安装在龙门型支架上,所述挤压板连接在挤压推杆的输出端上并位于分离箱体的上方。
14、本发明进一步地,所述挤压板上还均布有多个第一导管,多个所述第一导管能够一一对应穿过透水通孔,所述第一导管的一端连接于挤压板,所述第一导管的另一端设有第一圆锥形尖刺部,所述第一导管沿其长度方向均匀开设有多个第一通道,多个所述第一导管均与外界压缩空气管路连通。
15、本发明进一步地,所述挤压板在每个第一导管的四周分别设置有多个第二导管,所述第二导管的一端连接于挤压板,所述第二导管的另一端设有第二圆锥形尖刺部,所述第二导管沿其长度均匀开设有多个第一通道,多个所述第二导管能够一一对应穿过透水通孔。
16、本发明的有益效果为:本发明通过设置分离箱体和两个爪板,并通过开闭驱动机构驱动爪板进行开闭动作,同时利用旋转驱动机构驱动分离箱体转动,从而实现垃圾袋的抓取和脱水处理,利于垃圾袋内的水分集中处理,避免四处洒落。
技术特征:
1.一种垃圾分拣用机械手,其特征在于,包括关节机械臂(1)、龙门型支架(2)、分离箱体(3)、旋转驱动机构(4)和开闭驱动机构(5);
2.根据权利要求1所述的一种垃圾分拣用机械手,其特征在于,所述分离箱体(3)的底部还均布有多个锥形凸台(32),所述锥形凸台(32)与透水通孔(31)错开设置。
3.根据权利要求1所述的一种垃圾分拣用机械手,其特征在于,还包括有连接于龙门型支架(2)一侧的锁止机构(7),所述分离箱体(3)与锁止机构(7)对应的一侧间隔设有两个上下对称的定位筒(33);所述锁止机构(7)与定位筒(33)配合时对分离箱体(3)进行锁止。
4.根据权利要求3所述的一种垃圾分拣用机械手,其特征在于,所述锁止机构(7)包括有锁止支座(71)、锁止推杆(72)和锁止销(73),所述锁止支座(71)固定在龙门型支架(2)上,所述锁止推杆(72)安装在锁止支座(71)上,所述锁止销(73)活动贯穿于龙门型支架(2),所述锁止销(73)的一端与锁止推杆(72)的输出端连接。
5.根据权利要求1所述的一种垃圾分拣用机械手,其特征在于,所述爪板(6)一侧的两端分别凸设有铰接轴,所述分离箱体(3)对应设有凸耳,所述铰接轴铰接在对应的凸耳上;所述开闭驱动机构(5)包括开闭推杆(51)、两个推块(52)和两个连接杆(53),两个所述推块(52)对称滑动连接在分离箱体(3)上,所述开闭推杆(51)的固定端连接在一个推块(52)的一端上,所述开闭推杆(51)的输出端连接在另一个推块(52)的一端上,所述连接杆(53)的一端连接在爪板(6)的铰接轴上,所述连接杆(53)的另一端凸设有销轴,所述推块(52)的另一端开设有条形孔,所述销轴活动卡入对应的条形孔内。
6.根据权利要求5所述的一种垃圾分拣用机械手,其特征在于,所述爪板(6)的另一侧间隔设有多个半圆弧缺口。
7.根据权利要求1所述的一种垃圾分拣用机械手,其特征在于,还包括有设于龙门型支架(2)顶部的挤压机构(8),所述挤压机构(8)包括有挤压板(81)和挤压推杆(82),所述挤压推杆(82)安装在龙门型支架(2)上,所述挤压板(81)连接在挤压推杆(82)的输出端上并位于分离箱体(3)的上方。
8.根据权利要求7所述的一种垃圾分拣用机械手,其特征在于,所述挤压板(81)上还均布有多个第一导管(83),多个所述第一导管(83)能够一一对应穿过透水通孔(31),所述第一导管(83)的一端连接于挤压板(81),所述第一导管(83)的另一端设有第一圆锥形尖刺部(831),所述第一导管(83)沿其长度方向均匀开设有多个第一通道(832),多个所述第一导管(83)均与外界压缩空气管路连通。
9.根据权利要求8所述的一种垃圾分拣用机械手,其特征在于,所述挤压板(81)在每个第一导管(83)的四周分别设置有多个第二导管(84),所述第二导管(84)的一端连接于挤压板(81),所述第二导管(84)的另一端设有第二圆锥形尖刺部(841),所述第二导管(84)沿其长度均匀开设有多个第一通道(832),多个所述第二导管(84)能够一一对应穿过透水通孔(31)。
10.一种如权利要求9所述的垃圾分拣用机械手的分拣方法,其特征在于,包括如下步骤:
技术总结
本发明公开了一种垃圾分拣用机械手,包括关节机械臂、龙门型支架、分离箱体、旋转驱动机构和开闭驱动机构;龙门型支架连接于关节机械臂的输出端;分离箱体转动连接于龙门型支架,分离箱体具有一开口,开口的两侧分别铰接有能够封盖开口的爪板,爪板上均布有透水条孔;分离箱体的底部均布有多个透水通孔;旋转驱动机构连接于龙门型支架,并用于驱动分离箱体转动;开闭驱动机构连接于分离箱体的一侧,开闭驱动机构用于驱动两个爪板进行开闭动作;本发明通过设置分离箱体和两个爪板,通过开闭驱动机构驱动爪板进行开闭动作,利用旋转驱动机构驱动分离箱体转动,实现垃圾袋的抓取和脱水处理,利于垃圾袋内的水分集中处理,避免四处洒落。
技术研发人员:孔建东,高家华,袁德勋,詹颖茵,陈韵舒
受保护的技术使用者:东莞市邑新园林建设有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!