一种基于涡轮式抓手与视觉识别的软体气动机械臂
本发明涉及机械手,具体涉及一种基于涡轮式抓手与视觉识别的软体气动机械臂。
背景技术:
1、与刚性机械臂相比较,柔性机械臂具有结构轻、载重/自重比高等特性,因而具有较低的能耗、较大的操作空间和很高的效率,其响应快速而准确,有着很多潜在的优点,在农牧、食品和医疗等行业中具有广阔的应用前景。
2、目前的柔性机械在抓取易碎易伤物品的时候依然具有损坏物品的情况,因此有必要进行改进。
技术实现思路
1、本发明要解决的技术问题是提供一种基于涡轮式抓手与视觉识别的软体气动机械臂。与传统柔性机械臂相比,该基于涡轮式抓手与视觉识别的软体气动机械臂具有柔性和自适应性,在农牧、食品和医疗等行业中具有广阔的应用前景,不易导致被夹物损坏。
2、为解决上述问题,本发明采用如下技术方案:
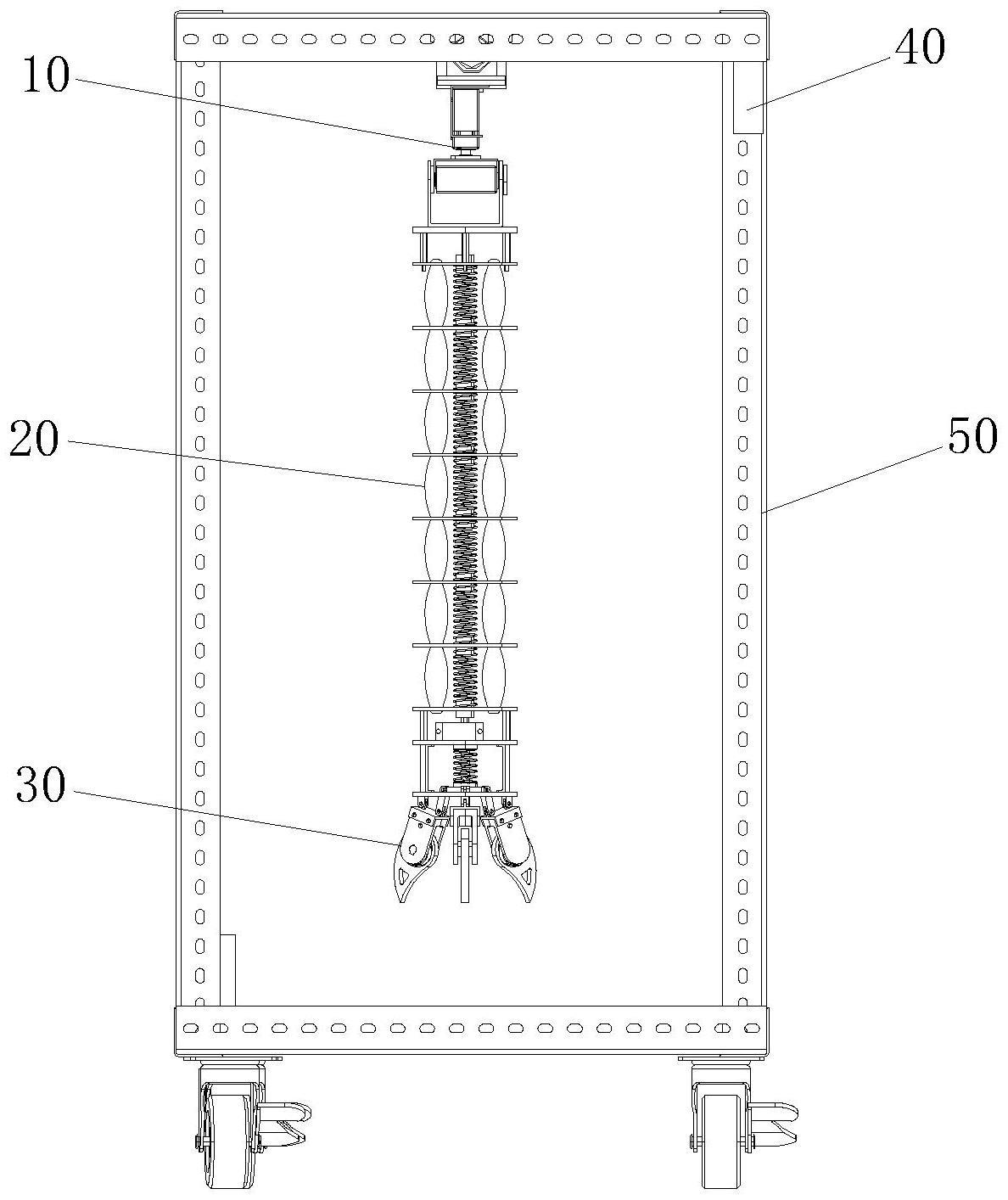
3、一种基于涡轮式抓手与视觉识别的软体气动机械臂,包括第一驱动机构、气动柔性机械臂体、夹持组件、视觉检测装置和控制装置。
4、所述气动柔性机械臂体首端固定地配置在所述第一驱动机构上。
5、所述夹持组件固定地配置在所述气动柔性机械臂体的末端。
6、其中,所述气动柔性机械臂体、夹持组件、视觉检测装置和第一驱动机构均与所述控制装置电性连接。
7、所述夹持组件具有第二驱动机构、连接架、活动架和多个抓手手指,所述抓手手指上设置有弹性涡式结构部,所述活动架具有连接轴。
8、所述连接轴配置为与所述弹性涡式结构部连接,以使所述抓手手指可根据被夹物自适应调节。
9、本公开至少一实施例提供的基于涡轮式抓手与视觉识别的软体气动机械臂中,还包括:机架;
10、其中,所述第一驱动机构和视觉检测装置均固定地配置在所述机架上。
11、本公开至少一实施例提供的基于涡轮式抓手与视觉识别的软体气动机械臂中,所述第一驱动机构包含有:运动平台、回转装置和翻转装置。
12、所述运动平台具有活动部件。
13、所述回转装置固定地配置在所述活动部件上,所述回转装置配置为跟随所述运动平台运动。
14、所述翻转装置固定地配置在所述回转装置上,所述翻转装置配置为跟随所述回转装置转动。
15、所述气动柔性机械臂体装配在所述翻转装置上,所述气动柔性机械臂体配置为跟随所述翻转装置活动。
16、本公开至少一实施例提供的基于涡轮式抓手与视觉识别的软体气动机械臂中,所述气动柔性机械臂体包含有:多个支撑板、多个气囊和供气机构。
17、所述多个气囊固定地配置在上下相邻的所述支撑板之间。
18、所述供气机构配置为与多个所述气囊连接,所述供气机构用于为多个所述气囊供气。
19、本公开至少一实施例提供的基于涡轮式抓手与视觉识别的软体气动机械臂中,上下相邻的所述支撑板之间设置有至少一个第一复位弹簧,用于驱动所述支撑板复位。
20、本公开至少一实施例提供的基于涡轮式抓手与视觉识别的软体气动机械臂中,所述活动架包含有:多个连接杆、连接盘和多个支撑件。
21、所述连接盘配置为与所述第二驱动机构联动。
22、所述多个支撑件具有第一连接座和第二连接座。
23、所述第一连接座和第二连接座呈对置设置,所述第一连接座位于所述支撑件顶面的一端,所述第二连接座位于所述支撑件顶面的另一端。
24、所述第一连接座配置为与所述连接架转动连接,所述第二连接座配置为与所述连接杆转的一端动连接,所述连接杆的另一端配置为与所述连接盘转动连接。
25、所述连接架上设置有第一穿孔,用于满足所述连接杆的活动需求。
26、所述连接盘位于所述连接架内。
27、所述连接轴与所述支撑件固定连接。
28、本公开至少一实施例提供的基于涡轮式抓手与视觉识别的软体气动机械臂中,所述连接架内配置有至少一个第二复位弹簧,所述至少一个第二复位弹簧一端与所述连接盘固定连接,所述至少一个第二复位弹簧另一端与所述连接架固定连接。
29、本公开至少一实施例提供的基于涡轮式抓手与视觉识别的软体气动机械臂中,所述第二驱动机构包含有:舵机和拉线。
30、所述舵机配置为与所述连接架固定连接。
31、所述拉线一端配置为与所述舵机的输出端固定连接,所述拉线另一端配置为与所述连接盘固定连接。
32、所述连接架上设置有第二穿孔,用于供所述拉线穿过。
33、本公开至少一实施例提供的基于涡轮式抓手与视觉识别的软体气动机械臂中,所述弹性涡式结构部包含有:轴连接部和多个弧形弹片;
34、所述轴连接部具有与连接轴相配对的定位孔。
35、多个所述弧形弹片以所述轴连接部为中心呈环形阵列分布,相邻的所述弧形弹片之间具有间隙。
36、本公开至少一实施例提供的基于涡轮式抓手与视觉识别的软体气动机械臂中,多个所述气囊以所述支撑板的中轴线为中心呈环形阵列分布。
37、本发明的有益效果为:
38、夹持组件能够有效地利用扭曲变形的特性,储存单位体积的高弹性能量,实现自动回复的功能,而且可根据被夹物自适应调节,进而安全地抓取易损易伤物体,减少被抓物在抓取时受到损伤的情况。
39、采用了气动柔性机械臂体,相较于传统的刚性机械臂的制作材料,其具有低成本、重量轻等优点。气动柔性机械臂体的作方法简单,受力性能较好。
40、通过配备有第一驱动机构,有效提高了气动柔性机械臂体的运动空间范围,提高了其灵活性与工作效率。
技术特征:
1.一种基于涡轮式抓手与视觉识别的软体气动机械臂,其特征在于,包括:
2.根据权利要求1所述的一种基于涡轮式抓手与视觉识别的软体气动机械臂,其特征在于,还包括:
3.根据权利要求2所述的一种基于涡轮式抓手与视觉识别的软体气动机械臂,其特征在于,所述第一驱动机构包含有:
4.根据权利要求1所述的一种基于涡轮式抓手与视觉识别的软体气动机械臂,其特征在于,所述气动柔性机械臂体包含有:
5.根据权利要求4所述的一种基于涡轮式抓手与视觉识别的软体气动机械臂,其特征在于,上下相邻的所述支撑板之间设置有至少一个第一复位弹簧,用于驱动所述支撑板复位。
6.根据权利要求1所述的一种基于涡轮式抓手与视觉识别的软体气动机械臂,其特征在于,所述活动架包含有:
7.根据权利要求6所述的一种基于涡轮式抓手与视觉识别的软体气动机械臂,其特征在于,所述连接架内配置有至少一个第二复位弹簧,所述至少一个第二复位弹簧一端与所述连接盘固定连接,所述至少一个第二复位弹簧另一端与所述连接架固定连接。
8.根据权利要求6所述的一种基于涡轮式抓手与视觉识别的软体气动机械臂,其特征在于,所述第二驱动机构包含有:
9.根据权利要求8所述的一种基于涡轮式抓手与视觉识别的软体气动机械臂,其特征在于,所述弹性涡式结构部包含有:
10.根据权利要求4所述的一种基于涡轮式抓手与视觉识别的软体气动机械臂,其特征在于,多个所述气囊以所述支撑板的中轴线为中心呈环形阵列分布。
技术总结
本发明涉及机械手技术领域,具体公开一种基于涡轮式抓手与视觉识别的软体气动机械臂,其包括第一驱动机构、气动柔性机械臂体、夹持组件、视觉检测装置和控制装置;夹持组件固定地配置在气动柔性机械臂体的末端;气动柔性机械臂体、夹持组件、视觉检测装置和第一驱动机构均与控制装置电性连接;夹持组件具有第二驱动机构、连接架、活动架和多个抓手手指,抓手手指上设置有弹性涡式结构部,活动架具有连接轴;连接轴配置为与弹性涡式结构部连接,以使抓手手指可根据被夹物自适应调节;由于夹持组件能够自适应收缩,这带来了功能上的灵活性和顺应性,在易碎易伤物品的抓取场景中能确保较高良品率。
技术研发人员:云涛,李靖,彭俊杰,孙志华,王淳锋,项超群,管贻生,朱海飞
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!