机器人关节补偿方法、装置、电子设备及可读存储介质与流程
本申请属于工业机器人测量领域,涉及一种机器人关节补偿方法、装置、电子设备及可读存储介质。
背景技术:
1、目前机器人的应用领域日渐成熟,机器人可以有效提高工作效率和产品品质。机器人在拾取不同的物件时将导致末端负载的变化,包括末端负载的质量、惯量等物理量,机器人的末端负载变化会影响机器人关节的运动状态,若末端负载发生改变,而其他控制关节运动的参数不变,则会影响机器人的作业精度,因此为了提高机器人的作业精度,所以需要对机器人的关节进行调整。
技术实现思路
1、本申请的主要目的在于提供一种机器人关节补偿方法,旨在解决因末端负载重量变化导致的机器人作业精度不高的技术问题。
2、为实现上述目的,本申请提供一种机器人关节补偿方法,所述机器人关节补偿方法包括:
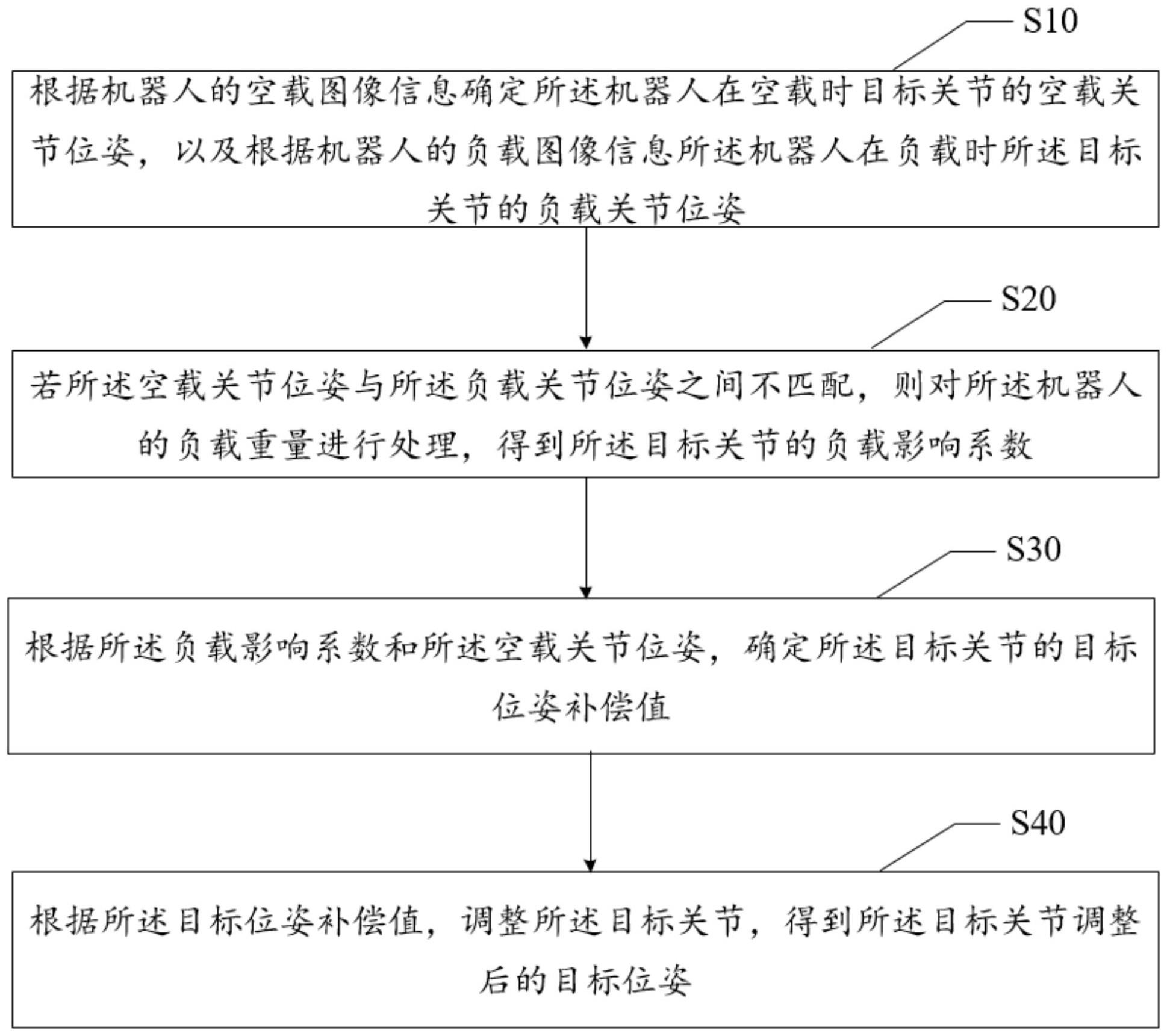
3、根据机器人的空载图像信息确定所述机器人在空载时目标关节的空载关节位姿,以及根据机器人的负载图像信息所述机器人在负载时所述目标关节的负载关节位姿;
4、若所述空载关节位姿与所述负载关节位姿之间不匹配,则对所述机器人的负载重量进行处理,得到所述目标关节的负载影响系数;
5、根据所述负载影响系数和所述空载关节位姿,确定所述目标关节的目标位姿补偿值;
6、根据所述目标位姿补偿值,调整所述目标关节,得到所述目标关节调整后的目标位姿。
7、为实现上述目的,本申请提供一种机器人关节补偿装置,所述机器人关节补偿装置包括:
8、位姿确定模块,用于根据机器人的空载图像信息确定所述机器人在空载时目标关节的空载关节位姿,以及根据机器人的负载图像信息所述机器人在负载时所述目标关节的负载关节位姿;
9、系数确定模块,用于若所述空载关节位姿与所述负载关节位姿之间不匹配,则对所述机器人的负载重量进行处理,得到所述目标关节的负载影响系数;
10、补偿值确定模块,用于根据所述负载影响系数和所述空载关节位姿,确定所述目标关节的目标位姿补偿值;
11、位姿调整模块,用于根据所述目标位姿补偿值,调整所述目标关节得到所述目标关节调整后的目标位姿。
12、本申请还提供一种电子设备,所述电子设备包括:存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的所述机器人关节补偿方法的程序,所述机器人关节补偿方法的程序被处理器执行时可实现如上述的机器人关节补偿方法的步骤。
13、本申请还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有实现机器人关节补偿方法的程序,所述机器人关节补偿方法的程序被处理器执行时实现如上述的机器人关节补偿方法的步骤。
14、本申请还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述的机器人关节补偿方法的步骤。
15、本申请提供了一种机器人关节补偿方法、装置、电子设备及可读存储介质,本申请通过空载图像信息确定机器人的目标关节的空载关节位姿,通过负载图像信息确定机器人目标关节的负载关节位姿,进而可以判断机器人的负载关节位姿是否出现偏差,在负载关节位姿出现偏差时,可以根据机器人的负载重量进行处理,得到目标关节的负载影响系数,进而可以根据负载影响系数确定所述目标关节的目标位姿补偿值,从而根据目标位姿补偿值对目标关节的关节姿态进行调整,实现了机器人负载重量变化导致的关节姿态异常时,可以对机器人目标关节的关节姿态进行调整,进而可以减小机器人的负载重量变化对作业精度的影响,提高了机器人的作业精度。
技术特征:
1.一种机器人关节补偿方法,其特征在于,所述机器人关节补偿方法包括:
2.如权利要求1所述的机器人关节补偿方法,其特征在于,所述根据机器人的空载图像信息确定所述机器人在空载时目标关节的空载关节位姿,以及根据机器人的负载图像信息所述机器人在负载时所述目标关节的负载关节位姿的步骤包括:
3.如权利要求2所述的机器人关节补偿方法,其特征在于,在所述若所述空载关节位姿与所述负载关节位姿之间不匹配,则对所述机器人的负载重量进行处理,得到所述目标关节的负载影响系数的步骤之前,所述机器人关节补偿方法还包括:
4.如权利要求3所述的机器人关节补偿方法,其特征在于,所述若所述空载关节位姿与所述负载关节位姿之间不匹配,则对所述机器人的负载重量进行处理,得到所述目标关节的负载影响系数的步骤包括:
5.如权利要求1所述的机器人关节补偿方法,其特征在于,所述根据所述负载影响系数和所述空载关节位姿,确定所述目标关节的目标位姿补偿值步骤包括:
6.如权利要求5所述的机器人关节补偿方法,其特征在于,所述根据所述目标位姿补偿值,调整所述目标关节,得到所述目标关节调整后的目标位姿的步骤包括:
7.如权利要求6所述的机器人关节补偿方法,其特征在于,在根据所述目标位姿补偿值,调整所述目标关节得到所述目标关节调整后的目标位姿还包括:
8.一种机器人关节补偿装置,其特征在于,所述机器人关节补偿装置包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有实现机器人关节补偿方法的程序,所述实现机器人关节补偿方法的程序被处理器执行以实现如权利要求1至7中任一项所述机器人关节补偿方法的步骤。
技术总结
本申请应用于机器人技术领域,公开了一种机器人关节补偿方法、装置、电子设备及可读存储介质,所述机器人关节补偿方法包括:根据机器人的空载图像信息确定所述机器人在空载时目标关节的空载关节位姿,以及根据机器人的负载图像信息所述机器人在负载时所述目标关节的负载关节位姿;若所述空载关节位姿与所述负载关节位姿之间不匹配,则对所述机器人的负载重量进行处理,得到所述目标关节的负载影响系数;根据所述负载影响系数和所述空载关节位姿,确定所述目标关节的目标位姿补偿值;根据所述目标位姿补偿值,调整所述目标关节,得到所述目标关节调整后的目标位姿。本申请旨在解决因末端负载重量变化导致的机器人作业精度不高的技术问题。
技术研发人员:蒋亦峰,丁亚,冯浩然,万云辉
受保护的技术使用者:佛山隆深机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!