一种基于巡检机器人的智能抄表系统及控制方法与流程
本发明涉及智能抄表,具体为一种基于巡检机器人的智能抄表系统及控制方法。
背景技术:
1、随着巡检机器人的迅速发展,电力行业也逐渐开始应用巡检机器人来完成一些该行业的工作,包括利用巡检机器人对电气仪表进行检查、利用巡检机器人进行抄表等,这些新颖的尝试提高了工作效率。在未来很长一段时间里,把巡检机器人应用于电力行业都将是非常热门的方向。
2、现有技术专利号cn104597903b-用于自动读表的变电站巡检机器人,该技术所提到的巡检机器人通过gps导航设备、存储设备、高清摄像设备、图像处理设备和tms320lf2407a型号的数字信号处理器dsp等装置,对电气仪表进行参数采集,但此巡检机器人只能对指针类电器仪表进行参数采集,不能对智能数字型电气仪表进行参数采集。
3、现有技术专利号cn110722583a-巡检机器人及巡检系统,该技术所提到的巡检机器人虽与本技术巡检机器人结构及功能相似,但其主要的应用场景是对电网进行安全巡检,而对于抄表这方面的应用没有进行阐述,并且其结构也决定了无法对智能电表进行翻页操作。
技术实现思路
1、为了解决传统技术巡检机器人无法对智能电表进行数据采集,以及无法对智能电表进行翻页操作以采集多页参数信息的痛点,本发明提出了一个基于巡检机器人的智能抄表系统及控制方法,通过该智能抄表系统与控制方法的相互配合,可以实现对智能电表电力参数数据的完整采集。
2、技术方案:本发明包括基于巡检机器人的智能抄表系统和与之配套的控制方法。
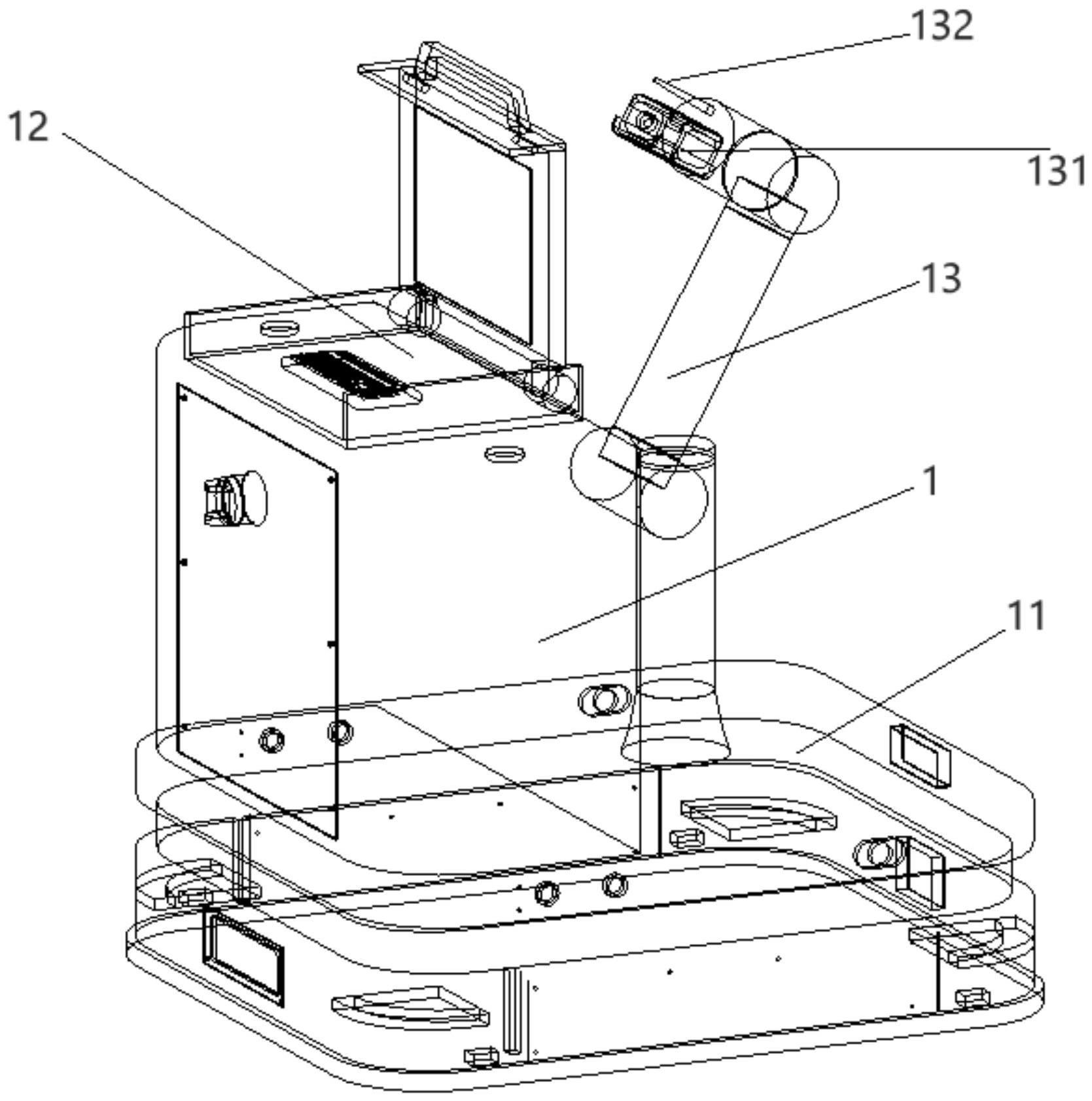
3、所述智能抄表系统由巡检机器人和配电柜组成,巡检机器人包括移动底盘,移动底盘上设有电脑主机和智能机械臂,智能机械臂上设有摄像头和顶杆,配电柜安装有智能电表。
4、所述配电柜前的地面上布置有色带,色带与配电柜的距离固定,巡检机器人根据色带指引的路线移动。
5、所述配电柜上设有若干定位标识,该定位标识用于巡检机器人对配电柜里的智能电表进行位置校准。
6、所述智能电表的翻页键上贴有定位贴,该定位贴用于为电力参数采集以及翻页操作进行位置校准。
7、所述巡检机器人在工作前,需要先手动控制摄像头,使其在固定位置对上述定位标识及定位贴进行图像抓取并保存,抓取到的定位标识图像和定位贴图像作为后续实际工作的参考图像。
8、当摄像头抓取定位标识参考图像时,智能机械臂所处的位置称为第一固定位置;当摄像头抓取定位贴参考图像时,智能机械臂所处的位置称为第二固定位置。
9、抓取定位贴的参考图像后,需手动调试智能机械臂及顶杆,记录下智能机械臂带动顶杆进行翻页操作所需的行程并储存在电脑主机中,后续实际工作进行翻页时,智能机械臂带动顶杆的行程即为此时存储在电脑主机的行程。
10、实际工作时,若摄像头实时采集的图像中出现定位标识,则电脑主机把实时采集到的定位标识图像与之前保存的定位标识图像进行对比,通过对比实时图像与参考图像的位置差异,电脑主机对移动底盘和智能机械臂发布控制指令,摄像头在智能机械臂的带动下运动并实时向电脑主机传送采集到的图像信息,电脑主机分析定位标识实时图像与定位标识参考图像,当摄像头实时采集的定位标识图像与参考图像完全重叠时,代表此时智能机械臂到达第一固定位置。
11、机械臂到达第一固定位置后,智能机械臂在电脑主机的控制下向上运动,当摄像头采集到定位贴时,证明此时智能机械臂已经到达第二固定位置附近,电脑主机接收摄像头传送来的定位贴实时图像,并与已经储存的定位贴参考图像进行对比,随后在电脑主机的精准控制下,智能机械臂进行细微调整,当摄像头实时采集的定位贴图像与参考图像完全重叠时,代表此时智能机械臂到达第二固定位置。
12、智能机械臂到达第二固定位置后,巡检机器人开始对智能电表的电力参数信息进行采集。首先,摄像头拍摄智能电表首页信息并上传电脑主机;然后,智能机械臂在电脑主机的控制下带动顶杆向前移动,顶杆按压智能电表翻页键实现翻页操作;最后,智能机械臂回到第二固定位置,摄像头对智能电表第二页的参数信息进行采集并上传电脑主机。巡检机器人重复上述操作直到完成一个智能电表所有页面的采集。
13、完成一个智能电表所有页面的采集后,巡检机器人在色带的指引下来到下一个智能电表附近,开始对下一个智能电表进行数据采集。重复此操作,直到完成所有智能电表的数据采集。
14、本发明具有如下有益效果:通过一种基于巡检机器人的智能抄表系统和与之配套的控制方法,不仅实现对智能电表电力参数数据的采集,还通过电脑主机、智能机械臂以及顶杆的相互配合,实现了对智能电表进行翻页的操作,使该智能抄表系统得以采集智能电表的多个页面数据,从而获得完整的电力参数数据。
技术特征:
1.一种基于巡检机器人的智能抄表系统,包括巡检机器人(1)和配电柜(2),其特征在于,所述巡检机器人(1)设有移动底盘(11),移动底盘(11)上设有电脑主机(12)和智能机械臂(13),智能机械臂(13)上设有摄像头(131)和顶杆(132);
2.根据权利要求1所述的一种基于巡检机器人的智能抄表系统,其特征在于,所述配电柜(2)前的地面上布置有色带(3),色带(3)与配电柜(2)的距离固定。
3.根据权利要求1或2所述的一种基于巡检机器人的智能抄表系统,其特征在于,所述配电柜(2)上设有若干定位标识(22),定位标识(22)位于智能电表(21)下方。
4.一种控制方法,适用于如权利要求1-3任一项所述的系统,其特征在于,实际工作前,巡检机器人(1)抓取并储存定位标识(22)及定位贴(211)参考图像,人工调试顶杆(132)移动行程并储存数值于电脑主机(12);
5.根据权利要求4所述的一种控制方法,其特征在于,实际工作时,电脑主机(12)通过对比实时采集的图像与参考图像,对移动底盘(11)和智能机械臂(13)发布控制指令,摄像头(131)在智能机械臂(13)的带动下运动并实时向电脑主机(12)传送图像信息。
6.根据权利要求4或5所述的一种控制方法,其特征在于,实际工作时,若实时采集到的定位标识(22)图像与储存的定位标识(22)参考图像完全重合,即代表智能机械臂(13)到达第一固定位置,若实时采集到的定位贴(211)图像与储存的定位贴(211)参考图像完全重合,即代表智能机械臂(13)到达第二固定位置。
7.根据权利要求6所述的一种控制方法,其特征在于,实际工作时,若智能机械臂(13)到达第二固定位置,则摄像头(131)拍摄智能电表(21)显示屏信息传送至电脑主机(12);进行翻页时,智能机械臂(13)带动顶杆(132)直线运动按压智能电表(21)翻页键,智能机械臂(13)带动顶杆(132)移动的行程即为之前储存在电脑主机(12)中的行程;翻页操作完成后,智能机械臂(13)重新回到第二固定位置,摄像头对智能电表显示屏新的页面进行拍照并传送至电脑主机。
技术总结
本发明公开了一种基于巡检机器人的智能抄表系统及控制方法,本智能抄表系统由巡检机器人和与之配套的配电柜组成。通过在配电柜前方的地面上设置色带来指引巡检机器人以固定路线移动;再通过分析定位标识和定位贴的图像实现对智能机械臂的位置校准,智能机械臂位置校准后摄像头采集智能电表的参数信息;当需要翻页时,顶杆在智能机械臂的带动下按压智能电表翻页键完成翻页操作,翻页操作结束后智能机械臂带动顶杆和摄像头回到翻页之前的位置,摄像头再对新的智能电表页面进行参数采集。本发明通过对巡检机器人结构以及控制方法的改进,使其可以采集多页智能电表参数信息,具有一定的实用性以及创造性。
技术研发人员:周海强
受保护的技术使用者:杭州彼盟建筑科技管理有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!