激光雷达转台与机械臂联合标定方法及装置与流程
本发明属于雷达标定,尤其涉及激光雷达转台与机械臂联合标定方法及装置。
背景技术:
1、激光测量技术是近年来迅速发展、快速应用的测量测绘技术。该技术的典型产品(激光雷达)广泛使用在如航空测绘、自动驾驶等工业领域。相比传统测量测绘技术,激光雷达具有数据量大,使用方便,生产效率高等特点;相比图像摄影测量技术,其具有分辨率高、精度高等特点,所以具有较强的不可替代性。
2、受制于激光雷达设备的生产调校工艺(主要依赖人工完成),高线数激光雷达的成本高、价格昂贵,一定程度上限制了其应用;低线数激光雷达虽然价格便宜,但其测量视场角窄,测量范围受限,适用场景少。所以现有技术(cn109188369a)中提供了一种低线数激光雷达与旋转平台相结合的方法,大大扩展了低线数激光雷达的测量范围。
3、激光雷达涉及激光雷达本体及转台两个部件的装配,由于加工误差和安装误差的存在,理论上难以较为精确的获知激光雷达与转台之间的相对位姿关系;为实现当转台旋转进行扫描测量时,将激光雷达本体坐标系测量的点精确变换到转台坐标系中,必须事先对激光雷达与转台之间的相对位姿关系进行严格标定。
技术实现思路
1、本发明解决其技术问题是采取以下技术方案实现的:
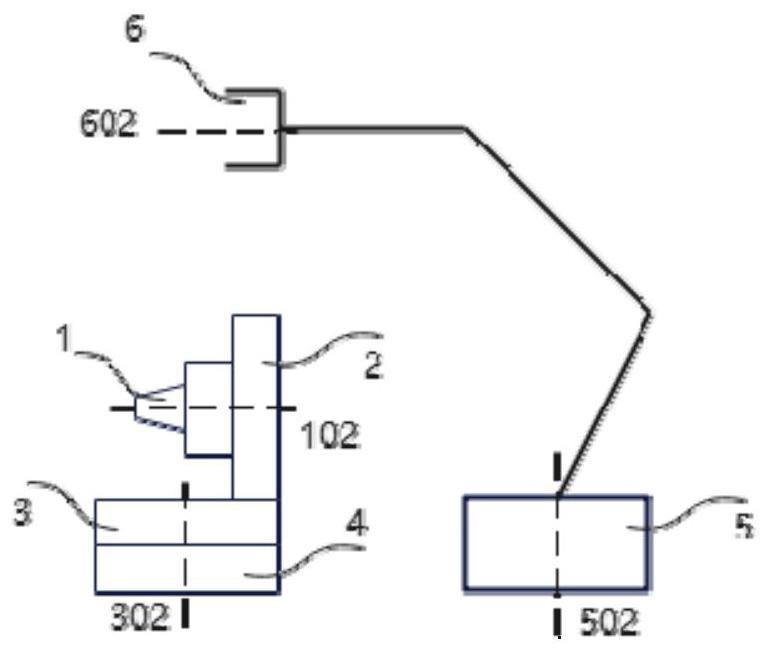
2、激光雷达转台与机械臂联合标定方法,所述激光雷达转台包含有基座、可相对于基座旋转的旋转平台以及与旋转平台固连的激光雷达本体;所述机械臂一端为机械臂基座,另一端为机械臂末端法兰,所述机械臂的一端相较于机械臂基座能旋转,机械臂末端法兰可绕机械臂末端转动,所述机械臂末端法兰上安装柱状标定治具;
3、该标定方法包括以下步骤:
4、控制机械臂到达第m位姿,将激光雷达转台旋转至第n角度,获取激光雷达观测点数据pl,从观测点数据pl中筛选出符合标定治具的观测点,表示为pls,并通过位姿变换得到pws;此时标定治具坐标系原点在机械臂基座坐标系下的坐标可由机械臂状态获取,记为pwa,则由激光雷达测量标定治具的方向向量可以表示为vl,vl=pws-pwa;
5、定义标定治具自身的方向为自身坐标系第一坐标轴,表示为vc,则标定治具的计算方向向量表示为vt,vt=t4*t5*vc;其中,t4为第四位姿变换,t5为第五位姿变换,定义机械臂末端法兰坐标系与机械臂基座坐标系的相对位置关系为第四位姿变换,定义标定治具坐标系到机械臂末端法兰坐标系的相对位置关系为第五位姿变换;
6、由于所述第一位姿变换、第三位姿变换与第五位姿变换的不准确性,标定治具的观测方向向量vl与标定治具的计算方向向量的vt有一定距离,记为d(pl,vt);
7、建立优化问题,以距离d为优化目标,循环的进行上述步骤对筛选阈值thv、第一位姿变换t1、第三位姿变换t3、第五位姿变换t5完成由粗到精的迭代优化,完成对第一位姿变换、第三位姿变换和第五位姿变换的精确值的计算,即完成激光雷达转台与机械臂的联合标定。
8、柱状标定治具方向与机械臂末端法兰坐标系第一坐标轴同向,同时柱状标定治具处于激光雷达转台测量视野范围内。
9、从观测点数据pl中筛选出符合标定治具的观测点时的筛选方法为:计算观测点pwl至机械臂末端法兰中心pwe的距离方向向量vse=pwe-pwl,当dse小于标定治具长度lt的1/2且方向差距vd=vse×vt小于筛选阈值thv时,则认定此观测点为有效观测点;其中,pwl为观测点数据pl通过位姿变换得到。
10、从观测点数据pl中筛选出符合标定治具的观测点,表示为pls,并通过位姿变换得到pws的方法为:
11、pws=t3*t2*t1*pls;其中,t1为第一位姿变换,t2为第二位姿变换,t3为第三位姿变换,定义激光雷达坐标系与旋转平台坐标系之间的相对位置关系为第一位姿变换,定义旋转平台坐标系与旋转平台基座坐标系之间的相对位置关系为第二位姿变换;定义旋转平台基座坐标系与机械臂基座坐标系之间的相对位置关系为第三位姿变换。
12、建立优化问题,以距离d为优化目标,对所述第一位姿变换t1、第三位姿变换t3和第五位姿变换t5进行优化:
13、
14、激光雷达转台与机械臂联合标定装置,包括:
15、由激光雷达测量标定治具的方向向量获取模块,用于控制机械臂到达第m位姿,将激光雷达转台旋转至第n角度,获取激光雷达观测点数据pl,从观测点数据pl中筛选出符合标定治具的观测点,表示为pls,并通过位姿变换得到pws;此时标定治具坐标系原点在机械臂基座坐标系下的坐标可由机械臂状态获取,记为pwa,则由激光雷达测量标定治具的方向向量可以表示为vl,vl=pws-pwa;
16、标定治具的计算方向向量获取模块,用于定义标定治具自身的方向为自身坐标系第一坐标轴,表示为vc,则标定治具的计算方向向量表示为vt,vt=t4*t5*vc;其中,t4为第四位姿变换,t5为第五位姿变换,定义机械臂末端法兰坐标系与机械臂基座坐标系的相对位置关系为第四位姿变换,定义标定治具坐标系到机械臂末端法兰坐标系的相对位置关系为第五位姿变换;
17、标定治具的观测方向向量与标定治具的计算方向向量距离获取模块,用于由于所述第一位姿变换、第三位姿变换与第五位姿变换的不准确性,标定治具的观测方向向量vl与标定治具的计算方向向量的vt有一定距离,记为d(pl,vt);
18、优化求解模块,用于建立优化问题,以距离d为优化目标,循环的进行上述步骤对筛选阈值thv、第一位姿变换t1、第三位姿变换t3、第五位姿变换t5完成由粗到精的迭代优化,完成对第一位姿变换、第三位姿变换和第五位姿变换的精确值的计算,即完成激光雷达转台与机械臂的联合标定。
19、一种电子设备,包括:至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行所述的激光雷达转台与机械臂联合标定方法。
20、一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现所述的激光雷达转台与机械臂联合标定方法。
21、本发明的优点和积极效果是:
22、本发明可以不依赖高精度激光雷达与特定场地、精密治具的联合标定方法,达到相同精度的标定效果;采用此方法标定的机器人共实际完成作业超过1700余次。
技术特征:
1.激光雷达转台与机械臂联合标定方法,其特征在于,所述激光雷达转台包含有基座、可相对于基座旋转的旋转平台以及与旋转平台固连的激光雷达本体;所述机械臂一端为机械臂基座,另一端为机械臂末端法兰,所述机械臂的一端相较于机械臂基座能旋转,机械臂末端法兰可绕机械臂末端转动,所述机械臂末端法兰上安装柱状标定治具;
2.根据权利要求1所述的激光雷达转台与机械臂联合标定方法,其特征在于,柱状标定治具方向与机械臂末端法兰坐标系第一坐标轴同向,同时柱状标定治具处于激光雷达转台测量视野范围内。
3.根据权利要求1所述的激光雷达转台与机械臂联合标定方法,其特征在于,从观测点数据pl中筛选出符合标定治具的观测点时的筛选方法为:计算观测点pwl至机械臂末端法兰中心pwe的距离方向向量vse=pwe-pwl,当dse小于标定治具长度lt的1/2且方向差距vd=vse×vt小于筛选阈值thv时,则认定此观测点为有效观测点;其中,pwl为观测点数据pl通过位姿变换得到。
4.根据权利要求1所述的激光雷达转台与机械臂联合标定方法,其特征在于,从观测点数据pl中筛选出符合标定治具的观测点,表示为pls,并通过位姿变换得到pws的方法为:
5.根据权利要求1所述的激光雷达转台与机械臂联合标定方法,其特征在于,建立优化问题,以距离d为优化目标,对所述第一位姿变换t1、第三位姿变换t3和第五位姿变换t5进行优化:
6.激光雷达转台与机械臂联合标定装置,其特征在于,包括:
7.一种电子设备,其特征在于,包括:至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1至5任一项所述的方法。
8.一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1至5任一项所述的方法。
技术总结
本发明涉及激光雷达转台与机械臂联合标定方法,所述激光雷达转台包含有基座、可相对于基座旋转的旋转平台以及与旋转平台固连的激光雷达本体;所述机械臂一端为机械臂基座,另一端为机械臂末端法兰,所述机械臂的一端相较于机械臂基座能旋转,机械臂末端法兰可绕机械臂末端转动,所述机械臂末端法兰上安装柱状标定治具;本标定方法需将标定治具安装于机械臂末端法兰,柱状标定治具方向与机械臂末端法兰坐标系第一坐标轴同向,同时该标定治具处于状态转台激光雷达测量视野范围内;本发明可以不依赖高精度激光雷达与特定场地、精密治具的联合标定方法,达到相同精度的标定效果;采用此方法标定的机器人共实际完成作业超过1700余次。
技术研发人员:张黎明,翟世雄,胡益菲,张奇,司威,于洁,白玉苓,张雨蔚,刘倞,郭世琦,于进汇,宋绍江
受保护的技术使用者:国网天津市电力公司滨海供电分公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!