一种多稳态超冗余柔性机械臂
本发明涉及机械臂,具体涉及一种多稳态超冗余柔性机械臂。
背景技术:
1、空间机器人是执行航天器在轨维护的主要工具,然而目前“卫星+刚性机械臂”方案由于目标适应性弱、灵巧性不足、自主能力有限,无法满足航天器在轨维护任务复杂多样的需求,况且未来大型设备维护、检修等任务对机械臂在限制性或狭小空间的作业能力提出了更高要求。传统刚性机械臂受构型、自由度等限制,在非结构下操控能力受到极大限制。因此急需发展柔性机械臂,完善中大型设备狭小空间监测和维护的能力。
2、目前对柔性机械臂高自由度、高精确度以及高安全性的需求,通常采用多稳态绳驱超冗余机械臂,通过对机械臂关节的结构设计、控制系统编程,运动规划,使机械臂能够实现包括弯曲、旋转、扭转、轴向伸缩在内的多种运动形式,并且可以通过关节与关节之间的组合,让多个关节组成一个连续平滑的、可控性高的运动系统,极大减小关节复杂度的同时,通过不同稳态的转换配合绳驱达到任意变换作业形态的目的,能够满足各个领域对具有复杂环境适应能力的新型机械臂的迫切需求,特别是在轨服务任务中,空间机器人涉及抓捕、操控等多项任务,要求空间机器人对服务目标抓捕能力强、抓捕后可精细操作等。但是,目前大多数超冗余机械臂其单关节无法实现可控的伸长和缩短,即便能够实现伸长和缩短,也存在精度不高,伸缩不到位的缺点。
技术实现思路
1、本发明的目的在于提供一种多稳态超冗余柔性机械臂,以解决现有超冗余机械臂伸缩精度不高,导致伸缩不到位的问题。
2、本发明解决上述技术问题的技术方案如下:
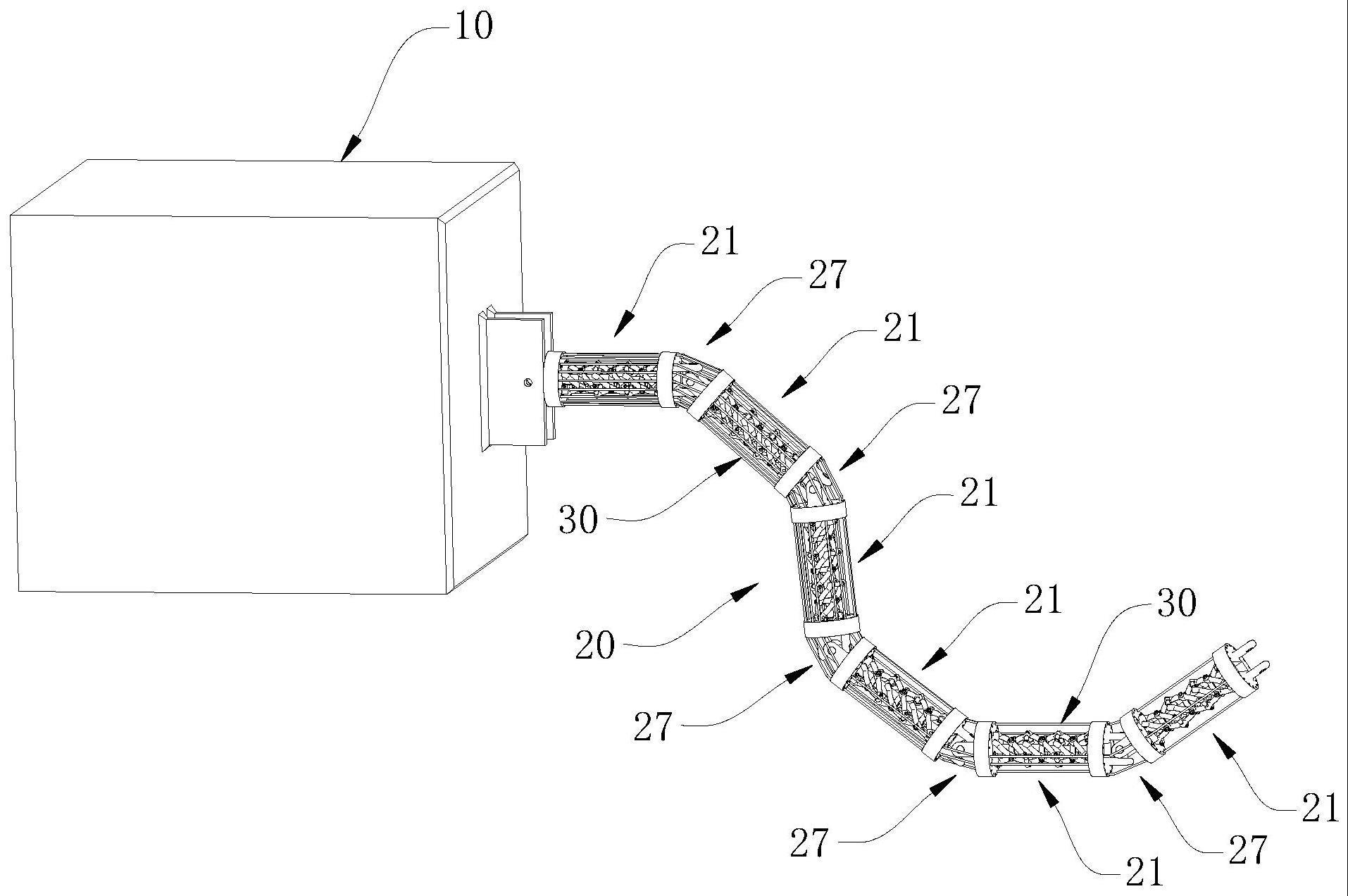
3、一种多稳态超冗余柔性机械臂,包括:基座、关节以及绳驱组件;关节包括多个依次连接的单关节,最后一节单关节与基座连接,相邻单关节之间铰接;单关节包括两个相对设置的底座,以及设置在两个底座之间的桁架组件和气弹簧,气弹簧位于桁架组件的内部,桁架组件和气弹簧沿单关节的延伸方向伸缩。
4、进一步地,上述桁架组件包括至少两组连杆组件;连杆组件包括分别与两个底座连接的第一连接块和第二连接块,以及多个依次铰接的连杆;同一连杆组件上的连杆螺旋设置在气弹簧的外侧,同一连杆组件两端的连杆分别与第一连接块和第二连接块铰接;所有连杆组件的连杆的螺旋方式一致。
5、进一步地,上述桁架组件的内侧设有中心环,中心环套设在气弹簧的外侧并与所有连杆组件相对应的连杆铰接。
6、进一步地,上述中心环的中心轴与桁架组件和气弹簧的伸缩方向平行。
7、进一步地,上述中心环与连杆的铰接方向垂直桁架组件和气弹簧的伸缩方向。
8、进一步地,上述连杆的中部呈拱形。
9、进一步地,上述相邻单关节之间通过万向节连接。
10、进一步地,上述绳驱组件包括数量一一对应的电机、卷筒以及驱动绳;每一个单关节远离基座的底座连接有至少三根驱动绳,驱动绳绕卷在卷筒上,卷筒与电机连接,卷筒和电机设置在基座内。
11、进一步地,上述每一个底座的边缘设有数量与驱动绳的数量一致的穿绳孔,穿绳孔用于对应的驱动绳的连接或对应的驱动绳的穿过。
12、进一步地,上述第一节单关节远离基座的底座设有摄像头和柔性压力传感器,用于探测末端复杂情况的空间情况,并且通过柔性压力传感器实时监测传感回压力数据并及时进行调整。
13、本发明具有以下有益效果:
14、(1)本发明的机械臂不但能实现常规机械臂的弯曲等动作,其单关节可以通过气弹簧进行伸缩,通过单关节的伸缩来实现整个机械臂的伸长和缩短,不但极大减小关节的复杂程度,而且稳态的时候整个机械臂的长度可控、精确,使关节能精确到达范围内的任意位置。
15、(2)本发明的桁架呈剪叉式结构,连接两个底座时,作为承重主要部件,保证气弹簧的横向稳定性,辅助气弹簧承受轴向力。
16、(3)本发明的气弹簧仅需要对其提供缩短或伸长的能量,对应的伸长或缩短的能量通过弹性势能提供,不但节省了能量,也能确保控制更加精确。
技术特征:
1.一种多稳态超冗余柔性机械臂,其特征在于,包括:基座(10)、关节(20)以及绳驱组件;所述关节(20)包括多个依次连接的单关节(21),最后一节单关节(21)与基座(10)连接,相邻单关节(21)之间铰接;所述单关节(21)包括两个相对设置的底座(22),以及设置在两个底座(22)之间的桁架组件(23)和气弹簧(24),所述气弹簧(24)位于所述桁架组件(23)的内部,所述桁架组件(23)和气弹簧(24)沿所述单关节(21)的延伸方向伸缩。
2.根据权利要求1所述的多稳态超冗余柔性机械臂,其特征在于,所述桁架组件(23)包括至少两组连杆组件(25);所述连杆组件(25)包括分别与两个底座(22)连接的第一连接块(251)和第二连接块(252),以及多个依次铰接的连杆(253);同一连杆组件(25)上的连杆(253)螺旋设置在所述气弹簧(24)的外侧,同一连杆组件(25)两端的连杆(253)分别与所述第一连接块(251)和所述第二连接块(252)铰接;所有连杆组件(25)的连杆(253)的螺旋方式一致。
3.根据权利要求2所述的多稳态超冗余柔性机械臂,其特征在于,所述桁架组件(23)的内侧设有中心环(26),所述中心环(26)套设在所述气弹簧(24)的外侧并与所有连杆组件(25)相对应的连杆(253)铰接。
4.根据权利要求3所述的多稳态超冗余柔性机械臂,其特征在于,所述中心环(26)的中心轴与所述桁架组件(23)和气弹簧(24)的伸缩方向平行。
5.根据权利要求4所述的多稳态超冗余柔性机械臂,其特征在于,所述中心环(26)与所述连杆(253)的铰接方向垂直所述桁架组件(23)和气弹簧(24)的伸缩方向。
6.根据权利要求2所述的多稳态超冗余柔性机械臂,其特征在于,所述连杆(253)的中部呈拱形。
7.根据权利要求1所述的多稳态超冗余柔性机械臂,其特征在于,相邻单关节(21)之间通过万向节(27)连接。
8.根据权利要求1至7任一项所述的多稳态超冗余柔性机械臂,其特征在于,所述绳驱组件包括数量一一对应的电机、卷筒以及驱动绳(30);每一个单关节(21)远离所述基座(10)的底座(22)连接有至少三根所述驱动绳(30),所述驱动绳(30)绕卷在所述卷筒上,所述卷筒与所述电机连接,所述卷筒和所述电机设置在所述基座(10)内。
9.根据权利要求8所述的多稳态超冗余柔性机械臂,其特征在于,每一个所述底座(22)的边缘设有数量与所述驱动绳(30)的数量一致的穿绳孔(221),所述穿绳孔(221)用于对应的驱动绳(30)的连接或对应的驱动绳(30)的穿过。
10.根据权利要求9所述的多稳态超冗余柔性机械臂,其特征在于,第一节单关节(21)远离所述基座(10)的底座设有摄像头和柔性压力传感器,用于探测末端复杂情况的空间情况,并且通过柔性压力传感器实时监测传感回压力数据并及时进行调整。
技术总结
本发明公开了一种多稳态超冗余柔性机械臂,属于机械臂技术领域。一种多稳态超冗余柔性机械臂,包括:基座、关节以及绳驱组件;关节包括多个依次连接的单关节,最后一节单关节与基座连接,相邻单关节之间铰接;单关节包括两个相对设置的底座,以及设置在两个底座之间的桁架组件和气弹簧,气弹簧位于桁架组件的内部,桁架组件和气弹簧沿单关节的延伸方向伸缩。本发明的机械臂不但能实现常规机械臂的弯曲等动作,其单关节可以通过气弹簧进行伸缩,通过单关节的伸缩来实现整个机械臂的伸长和缩短,不但极大减小关节的复杂程度,而且稳态的时候整个机械臂的长度可控、精确,使关节能精确到达范围内的任意位置。
技术研发人员:周青华,张宇恒,孙子悦,赵志军,周子涵,吕鹏,孙士杰,梅浩,蒲伟,周广武
受保护的技术使用者:四川大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!