一种基于相似性度量的工业机器人故障诊断方法与流程
本发明涉及机器人故障诊断方法领域,特别涉及一种基于相似性度量的工业机器人故障诊断方法。
背景技术:
1、当前工业机器人应用的故障诊断方法很少,且较多的专利存在于高校中,跟实际落地相隔甚远,当前学术前沿研究故障诊断绝大多数文献集中在“智能”诊断方法研究,由于深度学习存在一个难以跨越的鸿沟——可解释性差,因此难以在工业上的应用。
2、工业机器人故障诊断有别于高铁、飞机、风电、核电等高附加值设备的故障诊断,若为每台机器人的每个轴配备高灵敏度的振动传感器将造成高昂的经济成本,同时工业机器人在运行过程中各轴相对于基坐标系都在运动,因此也会造成对振动数据的干扰。因此通过采集机器人运行数据进行故障诊断是工业机器人领域中最经济的选择。
3、从控制器中获得的运行数据采样频率较低,原本真实信号为光滑曲线,但在低采样率的影响下,光滑曲线失真为锯齿形曲线,针对低采样率的数据进行进行滤波,便于后续统计特征的计算。
4、工业机器人经pid实时调节,数值在实时变化,即同一台机器跑相同的程序,两次采集到的电流数据并不能完全一致,因此需要去除该偏差的影响。
5、工业应用现场干扰因素较大,可能导致数据采集失真的问题,为保证数据的可靠性需要先检验数据是否满足后续分析的要求。
技术实现思路
1、本发明的旨在解决上述问题而提供一种基于相似性度量的工业机器人故障诊断方法,解决现有诊断方法精度不高,计算量大,效率不高的问题。
2、为达此目的,本发明采用以下技术方案:
3、一种基于相似性度量的工业机器人故障诊断方法,包括如下步骤:
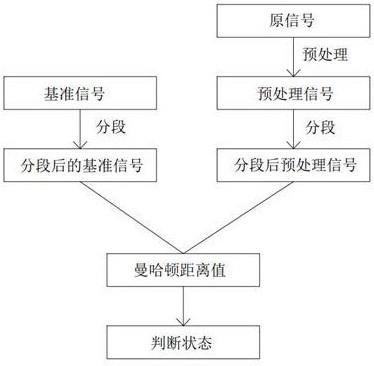
4、采集原信号并对原信号进行预处理,得到预处理信号,预处理用于去除原信号中噪音信号;
5、设置基准信号,将基准信号和预处理信号进行一一对应分段;
6、计算所有分段后的基准信号和预处理信号之间的曼哈顿距离值,并通过所有曼哈顿距离值判断机器人工作状态。
7、优选的,预处理采用的为小波去噪法,小波去噪法能够滤去原信号中的噪音信号。
8、优选的,将基准信号和预处理信号一一对应的分为6段信号;
9、基准信号所分成的6段信号分别为:正向加速段-基准信号、正向匀速段-基准信号、正向减速段-基准信号、反向加速段-基准信号、反向匀速段-基准信号、反向减速段-基准信号;
10、预处理信号所分成的6段信号分别为:正向加速段-预处理信号、正向匀速段-预处理信号、正向减速段-预处理信号、反向加速段-预处理信号、反向匀速段-预处理信号、反向减速段-预处理信号。
11、优选的,获取到原信号后,对原信号进行额外保存,将额外保存的原信号与预处理信号进行相关性检验;
12、对基准信号所分成的6段信号与预处理信号所分成的6段信号进行相关性检验。
13、优选的,相关性检验所采用的方法为皮尔逊检验法。
14、优选的,将基准信号所分成的6段信号与预处理信号所分成的6段信号一一对应并进行计算,得到6段信号的曼哈顿距离值。
15、优选的,通过所述曼哈顿距离值计算得到的值分别为:正向加速段曼哈顿距离值、正向匀速段曼哈顿距离值、正向减速段曼哈顿距离值、反向加速段曼哈顿距离值、反向匀速段曼哈顿距离值和反向减速段曼哈顿距离值。
16、优选的,机器人工作状态判断包括如下步骤:
17、(1)、设置6段信号的曼哈顿距离值的阈值;
18、(2)、计算6段信号的曼哈顿距离值的累计曼哈顿距离值;
19、(3)、设置累计曼哈顿距离值的阈值;
20、(4)、6段信号的曼哈顿距离值和1个累计曼哈顿距离值分别与各自对应的阈值进行比较,从而判断机器人的工作状态。
21、本发明的贡献在于:本发明通过将基准信号和预处理信号进行分段,将基准信号和预处理信号进行了划分,并对划分后的各段信号分别进行计算,通过各段信号的曼哈顿距离值判断机器人的工作状态,即从多方面进行比对,增加了计算结果的准确性和判断的准确性。
22、采用曼哈顿距离值进行计算并判断机器人状态,相较于欧式距离来说,本发明的计算量更小,由于计算量大为减小,使得运行速度也更块,能够更快的判断处机器人的工作状态。
技术特征:
1.一种基于相似性度量的工业机器人故障诊断方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于相似性度量的工业机器人故障诊断方法,其特征在于:预处理采用的为小波去噪法,小波去噪法能够滤去原信号中的噪音信号。
3.根据权利要求1所述的一种基于相似性度量的工业机器人故障诊断方法,其特征在于:将基准信号和预处理信号一一对应的分为6段信号;
4.根据权利要3所述的一种基于相似性度量的工业机器人故障诊断方法,其特征在于:获取到原信号后,对原信号进行额外保存,将额外保存的原信号与预处理信号进行相关性检验;
5.根据权利要求4所述的一种基于相似性度量的工业机器人故障诊断方法,其特征在于:相关性检验所采用的方法为皮尔逊检验法。
6.根据权利要求4所述的一种基于相似性度量的工业机器人故障诊断方法,其特征在于:将基准信号所分成的6段信号与预处理信号所分成的6段信号一一对应并进行计算,得到6段信号的曼哈顿距离值。
7.根据权利要求6所述的一种基于相似性度量的工业机器人故障诊断方法,其特征在于,通过所述曼哈顿距离值计算得到的值分别为:正向加速段曼哈顿距离值、正向匀速段曼哈顿距离值、正向减速段曼哈顿距离值、反向加速段曼哈顿距离值、反向匀速段曼哈顿距离值和反向减速段曼哈顿距离值。
8.根据权利要求7所述的一种基于相似性度量的工业机器人故障诊断方法,其特征在于:机器人工作状态判断包括如下步骤:
技术总结
本发明涉及机器人故障诊断方法领域,公开了一种基于相似性度量的工业机器人故障诊断方法,包括如下步骤:采集原信号并对原信号进行预处理,得到预处理信号,预处理用于去除原信号中噪音信号;设置基准信号,将基准信号和预处理信号进行一一对应分段;计算所有分段后的基准信号和预处理信号之间的曼哈顿距离值,并通过所有曼哈顿距离值判断机器人工作状态。通过将基准信号和预处理信号进行分段,将基准信号和预处理信号进行了划分,并对划分后的各段信号分别进行计算,通过各段信号的曼哈顿距离值判断机器人的工作状态,即从多方面进行比对,增加了计算结果的准确性和判断的准确性。
技术研发人员:向珍琳,周星,蔡久凤,林彦英,朱润智,何文浩,张建华,廖泓扬
受保护的技术使用者:佛山智能装备技术研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!