机器人控制方法、装置和变电站作业辅助机器人与流程
本申请涉及电力,特别是涉及一种机器人控制方法、装置、存储介质、计算机程序产品和变电站作业辅助机器人。
背景技术:
1、作为电力系统中的组成部分,变电站起着调整电压、转换电能类型、分配电能等重要作用。为保证变电设备的安全、稳定和高效运行,变电站内监测和管理系统的建设成为当前研究的重点。随着生产自动化需求的提出和智能科技的进步,越来越多的智能产品和装备正在变电站巡检任务中得到广泛应用,例如变电站作业机器人。
2、为了让变电站作业机器人更好地在作业现场进行巡检,往往需要用户对变电站作业机器人下达一些移动指令,然后,相关技术中,由于变电站作业机器人无法准确地识别出移动指令,导致人机交互智能性较差。
3、因此,相关技术在机器人巡检过程中存在着人机交互智能性差的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够在机器人巡检过程中提高人机交互智能性的机器人控制方法、装置、计算机可读存储介质、计算机程序产品和变电站作业辅助机器人。
2、第一方面,本申请提供了一种机器人控制方法。所述方法包括:
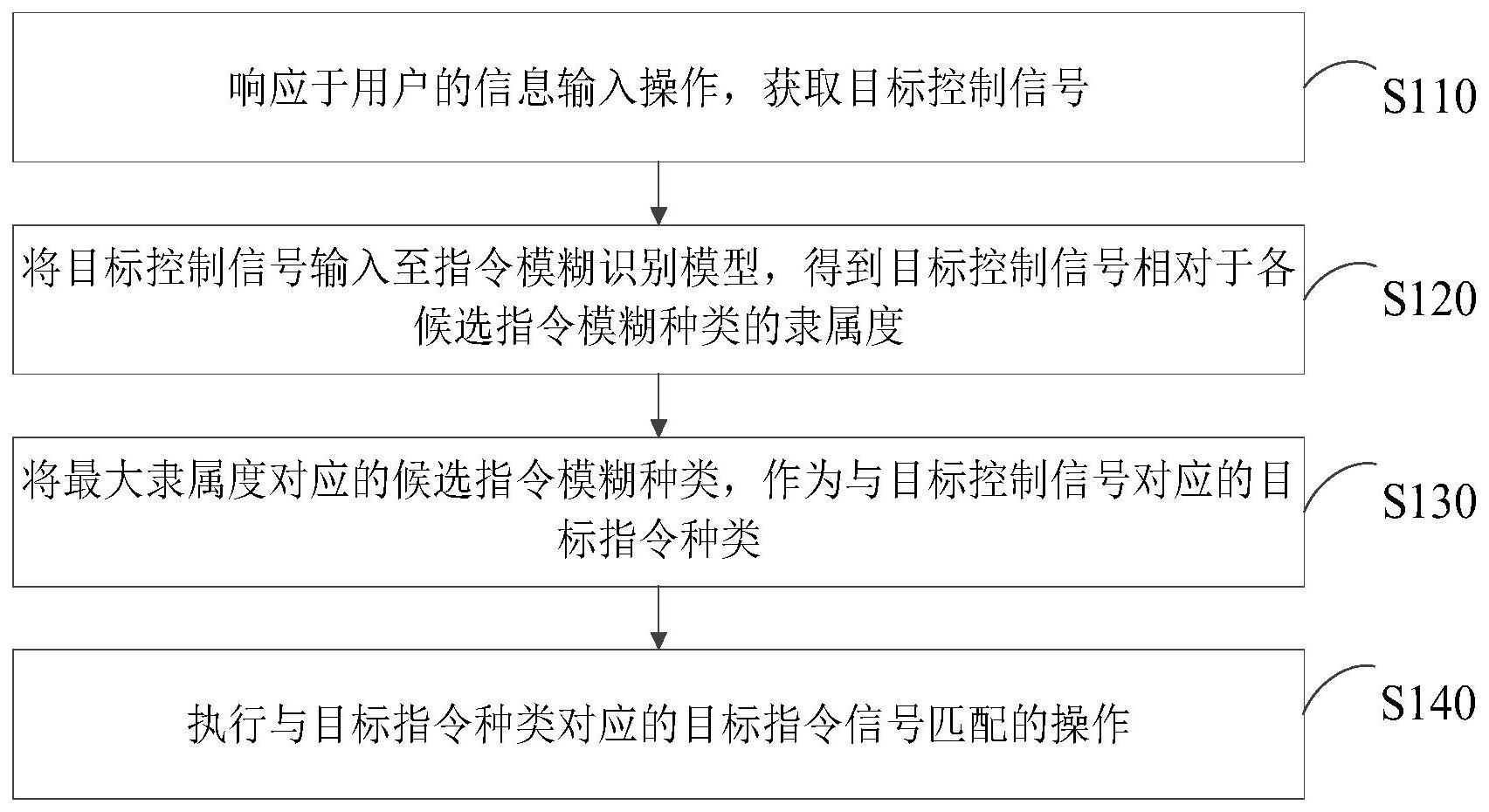
3、响应于用户的信息输入操作,获取目标控制信号;
4、将所述目标控制信号输入至指令模糊识别模型,得到所述目标控制信号相对于各候选指令模糊种类的隶属度;
5、将最大隶属度对应的候选指令模糊种类,作为与所述目标控制信号对应的目标指令种类;
6、执行与所述目标指令种类对应的目标指令信号匹配的操作。
7、在其中一个实施例中,所述指令模糊识别模型包括与各所述候选指令模糊种类对应的指令模糊识别模型;各所述指令模糊识别模型由对应的隶属函数构成;所述将所述目标控制信号输入至指令模糊识别模型,得到所述目标控制信号相对于各候选指令模糊种类的隶属度,包括:
8、将所述目标控制信号输入至各所述候选指令模糊种类对应的隶属函数,得到各所述隶属函数针对所述目标控制信号输出的隶属度;
9、根据各所述隶属函数针对所述目标控制信号输出的隶属度,确定所述目标控制信号相对于各候选指令模糊种类的隶属度。
10、在其中一个实施例中,所述响应于用户的信息输入操作,获取用户目标控制信号,包括:
11、响应于用户的信息输入操作,获取控制信号;
12、提取所述控制信号中的关键信息对应的信号,作为所述目标控制信号。
13、在其中一个实施例中,所述提取所述控制信号中的关键信息对应的信号,作为所述目标控制信号,包括:
14、将所述控制信号转换为数字信号;
15、提取所述数字信号中关键信息对应的信号,作为所述目标控制信号。
16、在其中一个实施例中,所述控制信号包括语音信号;所述数字信号包括所述语音信号对应的第一数字信号;所述提取所述数字信号中关键信息对应的信号,作为所述目标控制信号,包括:
17、确定所述第一数字信号中移动描述词汇信息对应的数字信号,作为目标语音信号;
18、将所述目标语音信号作为所述语音信号对应的目标控制信号。
19、在其中一个实施例中,所述控制信号包括手势视频信号;所述数字信号包括所述手势视频信号对应的第二数字信号;所述提取所述数字信号中关键信息对应的信号,作为所述目标控制信号,包括:
20、确定所述第二数字信号中属于目标区域的图像信息对应的数字信号,作为目标手势信号;
21、将所述目标手势信号作为所述手势视频信号对应的目标控制信号。
22、第二方面,本申请还提供了一种机器人控制装置。所述装置包括:
23、获取模块,用于响应于用户的信息输入操作,获取目标控制信号;
24、输入模块,用于将所述目标控制信号输入至指令模糊识别模型,得到所述目标控制信号相对于各候选指令模糊种类的隶属度;
25、种类确定模块,用于将最大隶属度对应的候选指令模糊种类,作为与所述目标控制信号对应的目标指令种类;
26、执行模块,用于执行与所述目标指令种类对应的目标指令信号匹配的操作。
27、第三方面,本申请还提供了一种变电站作业辅助机器人。所述变电站作业辅助机器人包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
28、响应于用户的信息输入操作,获取目标控制信号;
29、将所述目标控制信号输入至指令模糊识别模型,得到所述目标控制信号相对于各候选指令模糊种类的隶属度;
30、将最大隶属度对应的候选指令模糊种类,作为与所述目标控制信号对应的目标指令种类;
31、执行与所述目标指令种类对应的目标指令信号匹配的操作。
32、第四方面,本申请还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
33、响应于用户的信息输入操作,获取目标控制信号;
34、将所述目标控制信号输入至指令模糊识别模型,得到所述目标控制信号相对于各候选指令模糊种类的隶属度;
35、将最大隶属度对应的候选指令模糊种类,作为与所述目标控制信号对应的目标指令种类;
36、执行与所述目标指令种类对应的目标指令信号匹配的操作。
37、第五方面,本申请还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
38、响应于用户的信息输入操作,获取目标控制信号;
39、将所述目标控制信号输入至指令模糊识别模型,得到所述目标控制信号相对于各候选指令模糊种类的隶属度;
40、将最大隶属度对应的候选指令模糊种类,作为与所述目标控制信号对应的目标指令种类;
41、执行与所述目标指令种类对应的目标指令信号匹配的操作。
42、上述机器人控制方法、装置、存储介质、计算机程序产品和变电站作业辅助机器人,通过响应于用户的信息输入操作,获取目标控制信号;将目标控制信号输入至指令模糊识别模型,得到目标控制信号相对于各候选指令模糊种类的隶属度;将最大隶属度对应的候选指令模糊种类,作为与目标控制信号对应的目标指令种类;执行与目标指令种类对应的目标指令信号匹配的操作。如此,通过对用户输入的目标控制信号进行模糊识别,确定目标控制信号相对于各候选指令模糊种类的隶属度,并将最大隶属度对应的候选指令模糊种类,作为符合用户需求的目标指令种类,从而可以准确识别用户输入的指令,有效提高了机器人巡检过程中的人机交互智能性。
技术特征:
1.一种机器人控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述指令模糊识别模型包括与各所述候选指令模糊种类对应的指令模糊识别模型;各所述指令模糊识别模型由对应的隶属函数构成;所述将所述目标控制信号输入至指令模糊识别模型,得到所述目标控制信号相对于各候选指令模糊种类的隶属度,包括:
3.根据权利要求1所述的方法,其特征在于,所述响应于用户的信息输入操作,获取用户目标控制信号,包括:
4.根据权利要求3所述的方法,其特征在于,所述提取所述控制信号中的关键信息对应的信号,作为所述目标控制信号,包括:
5.根据权利要求4所述的方法,其特征在于,所述控制信号包括语音信号;所述数字信号包括所述语音信号对应的第一数字信号;所述提取所述数字信号中关键信息对应的信号,作为所述目标控制信号,包括:
6.根据权利要求4所述的方法,其特征在于,所述控制信号包括手势视频信号;所述数字信号包括所述手势视频信号对应的第二数字信号;所述提取所述数字信号中关键信息对应的信号,作为所述目标控制信号,包括:
7.一种机器人控制装置,其特征在于,所述装置包括:
8.一种变电站作业辅助机器人,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至6中任一项所述的方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
10.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
技术总结
本申请涉及一种机器人控制方法、装置、存储介质、计算机程序产品和变电站作业辅助机器人。所述方法包括:响应于用户的信息输入操作,获取目标控制信号;将所述目标控制信号输入至指令模糊识别模型,得到所述目标控制信号相对于各候选指令模糊种类的隶属度;将最大隶属度对应的候选指令模糊种类,作为与所述目标控制信号对应的目标指令种类;执行与所述目标指令种类对应的目标指令信号匹配的操作。采用本方法能够在机器人巡检过程中提高人机交互智能性。
技术研发人员:宋云海,周震震,何森,黄和燕,何宇浩,王黎伟,肖耀辉,何珏,陈伟,杨育丰,李强
受保护的技术使用者:中国南方电网有限责任公司超高压输电公司电力科研院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!