一种具有减振缓冲功能的工业外骨骼机器人踝关节的制作方法
本发明属于外骨骼机器人领域,具体涉及一种具有减振缓冲功能的工业外骨骼机器人踝关节。
背景技术:
1、工业外骨骼机器人是一种能够辅助并增强人体机能的穿戴式机器人,可降低穿戴者工作疲劳强度,保护身体健康,提高劳动效率。踝关节作为工业外骨骼机器人重要组成部分,对外骨骼机器人的支撑和人体连接有重要影响。现有的工业外骨骼机器人踝关节设计方案较多采用刚性支撑结构设计,采用该结构在行走过程中与地面刚性接触产生的冲击极易影响设备自身的电器件和连接件的使用寿命以及外骨骼机器人的应用体验。部分优化设计方案选择采用刚性结构加柔性件的设计,专利cn104644381b公布了一种外骨骼用三自由度柔性踝关节装置,具有一个平移两个转动共三个运动自由度,通过足底支撑结构的弹性支撑件和防震填充层、足侧支撑部的柔性转动副及足后阻尼器减轻振动对穿戴者的冲击。但该技术方案中足底支撑结构的下底板仍为连块钢板结构,足侧支撑部及小腿支护架通过铰链连接至下底板,其本质上仍为刚性连接,弹性结构对设备并未起到减振效果;此外,为保证踝关节自由度,主动力踝关节结构复杂,重量大,导致其制造生产成本高昂。
2、发明cn113084862的发明提出了一种具有三柔性驱动分支的外骨骼机器人踝关节,具有三个转动自由度,且每个自由度均为主动自由度,由于每个驱动分支的移动副都含有驱动电机,导致其结构复杂,整体重量偏重。复杂结构及高重量使其无法适应复杂工厂工况。
3、综上,现有外骨骼机器人踝关节存在的问题主要包括:刚性结构的踝关节未能起到有效的减振缓冲效果,柔性驱动的外骨骼踝关节则结构复杂,重量大无法适用于工业外骨骼,找到可以实现减振缓冲功能,结构简单且适用性好的的踝关节设计方案势在必行。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种具有减振缓冲功能的工业外骨骼机器人踝关节,降低外骨骼机器人与地面接触产生的振动冲击,该关节在使用过程中可在与地面接触时降低冲击,储存能量,在抬脚时释放能量,增强外骨骼设备的可靠性,提高使用者的穿戴舒适性。
2、为实现上述目的,本发明采用以下技术方案:
3、一种具有减振缓冲功能的工业外骨骼机器人踝关节,包括小腿支撑杆组件、减振缓冲机构、踝关节支撑机构;其中小腿支撑杆组件与小腿壳体连接,踝关节支撑机构与地面接触并通过固定绑带与人体脚踝相连固定,小腿支撑杆组件下端与踝关节支撑机构上端滑动连接,并在连接处形成腔体空间,减振缓冲机构容置于小腿支撑杆组件与踝关节支撑机构形成的腔体空间内;所述小腿支撑杆组件、减振缓冲机构及踝关节支撑连接结构配合可以实现工业外骨骼机器人行进过程中的减振缓冲。
4、进一步地,所述的踝关节支撑机构包括踝关节支撑件、橡胶垫、左盖板、右盖板、关节轴承、轴承挡塞、夹板螺母、固定绑带连接件和固定绑带,其中,所述踝关节支撑件下端与橡胶垫相连,橡胶垫起到减振缓冲和保护踝关节支撑件的作用;所述踝关节支撑件中间设有关节轴承的安装孔,关节轴承采用过盈配合并通过紧定螺钉固定,在安装孔的另一端安装轴承挡塞;所述左盖板和右盖板通过螺钉和销轴固定在关节支撑件上,所述固定绑带连接件通过所述关节轴承与所述踝关节支撑件相连,固定绑带固连在固定绑带连接件上;
5、进一步地,所述小腿支撑杆组件包括小腿支撑杆、导向封闭盖板,其中,所述小腿支撑杆上端与小腿壳体滑动配合,小腿支撑杆侧面设有档位槽,与小腿壳体上的档位开关配合可实现外骨骼小腿高度的调节和锁止;所述小腿支撑杆上设有减重槽,保证结构强度的同时降低零件的重量;所述小腿支撑杆与所述导向封闭盖板通过螺钉相连;所述小腿支撑杆下端设有凹槽,与所述踝关节支撑件内的凹槽配合形成缓冲机构容置腔体;所述导向封闭盖板在所述踝关节支撑件上的导向滑槽内滑动,二者配合实现对所述容置腔体的封闭。
6、进一步地,所述小腿支撑杆与所述踝关节支撑件滑动配合,所述小腿支撑杆下端设有突起,踝关节支撑件上方设有滑动凹槽,左盖板上设有滑动凹槽,右盖板上设有滑动凹槽,滑动凹槽配合形成封闭空间,所述突起在所述封闭空间内滑动,通过对所述封闭空间及所述突起的尺寸设计控制所述小腿支撑杆的缓冲行程。
7、进一步地,所述减振缓冲机构包括减振弹簧和导向轴,所述踝关节支撑件内设有轴安装孔及限位销孔,其上装有导向轴,并通过限位销轴对导向轴固定,所述减振弹簧穿过所述导向轴,并且两端与踝关节支撑件和小腿支撑杆组件抵连。
8、进一步地,所述减振弹簧包括但不限于压缩弹簧、矩形弹簧、气弹簧,其刚度系数k的计算可根据下列公式计算:
9、
10、
11、k=s×k (3)
12、式中:v0为踝关节落地时初始速度,x为减震弹簧的预设行程,m为下肢外骨骼机器人质量(含踝关节中小腿支撑杆及导向盖板),u滑动摩擦系数,fn为小腿支撑杆受到的压紧力,k为弹簧计算刚度,f0为弹簧预紧力,s为弹簧安全系数。
13、进一步地,所述压紧力fn可通过下式计算:
14、fn=n×fm (4)
15、n为紧固螺钉的数量,fm为螺栓拧紧力,通过经验计算公式计算得出:
16、
17、式中:t为所施加的扭矩,p为螺距,ug为螺纹副中的摩擦系数,d2为螺栓的直径,dkm=(dw+dh)/2,ug为螺栓头下摩擦系数,dw接触的支撑面外径,dh接触的支撑面内径。
18、与现有技术相比,本发明的优点和有益效果是:
19、(1)缓冲机构能够有效减少振动冲击,结构可靠,穿戴后不影响人体走动、站立等正常活动;
20、(2)本发明主体结构采用铝合金材料加工,采用螺纹和销连接紧固,重量轻且刚度性能好;
21、(3)本发明中选用的弹簧和橡胶垫为可替代消耗品,通过定期更换替代件可维持设备的最佳使用状态;
22、(4)本发明的基本原理是采用弹簧缓冲连接结构替代刚性连接机构,通过设计合适的压缩弹簧的刚度给予踝关节的支撑力和支撑刚度,降低设备与地面接触产生的振动冲击,进而优化外骨骼的可靠性和舒适性。
技术特征:
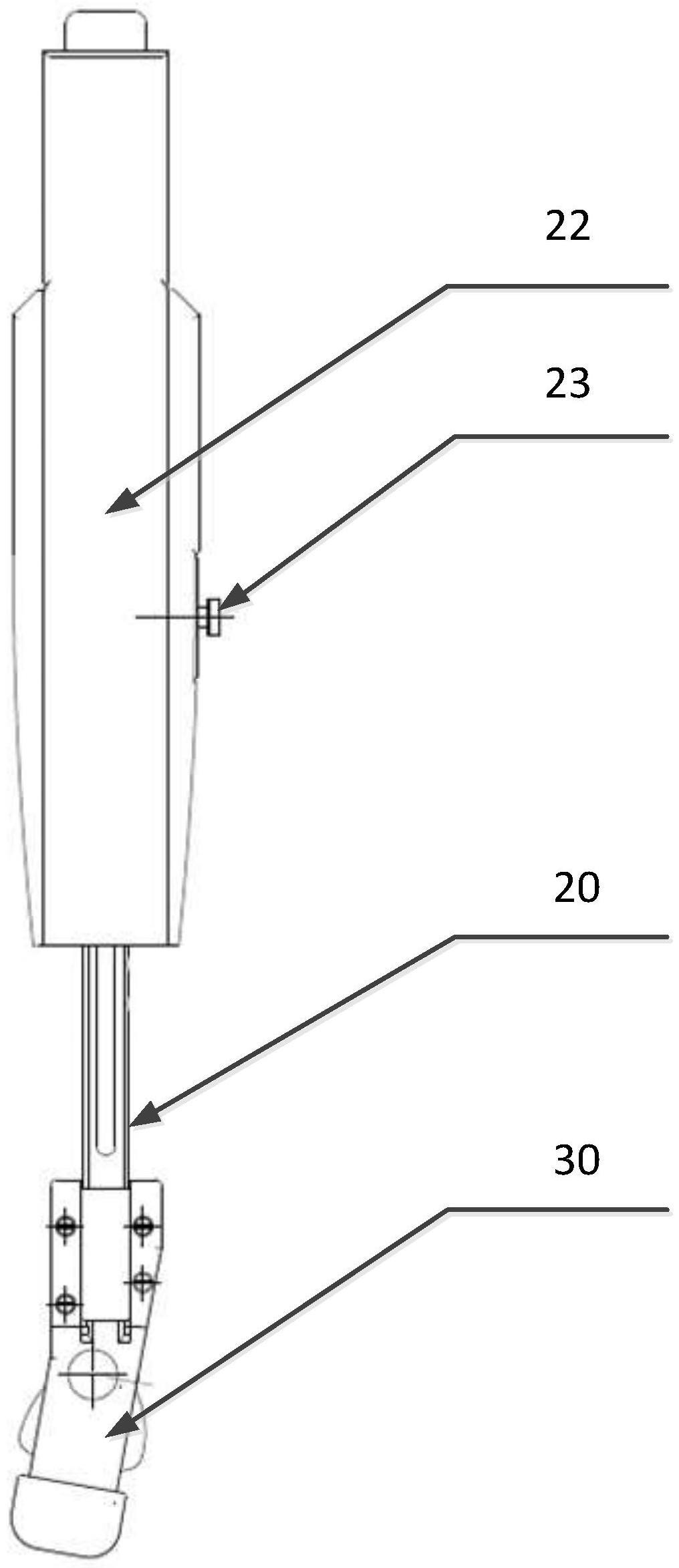
1.一种具有减振缓冲功能的工业外骨骼机器人踝关节,其特征在于,包括小腿支撑杆组件(20)、踝关节支撑机构(30)和减振缓冲机构(40),其中,小腿支撑杆组件(20)上端与小腿壳体(22)连接,踝关节支撑机构(30)与地面接触,小腿支撑杆组件(20)下端与踝关节支撑机构(30)上端滑动连接,并在连接处形成腔体(308),减振缓冲机构(40)容置于腔体(308)内;三者配合实现工业外骨骼机器人在行进过程中的减振缓冲。
2.根据权利要求1所述的一种具有减振缓冲功能的工业外骨骼机器人踝关节,其特征在于,所述踝关节支撑机构(30)包括踝关节支撑件(1)、橡胶垫(2)、左盖板(3)、右盖板(4)、关节轴承(6)、轴承挡塞(7)、夹板螺母(8)、固定绑带连接件(9)和固定绑带(10),其中,所述踝关节支撑件(1)下端与橡胶垫(2)相连,中间设有关节轴承(6)的安装孔(301),并且在安装孔(301)的另一端安装轴承挡塞(7),左盖板(3)和右盖板(4)固连在关节支撑件(1)上,所述固定绑带连接件(9)通过所述关节轴承(6)与所述踝关节支撑件(1)相连,所述固定绑带(10)固连在所述固定绑带连接件(9)上。
3.根据权利要求2所述的一种具有减振缓冲功能的工业外骨骼机器人踝关节,其特征在于,所述关节轴承(6)和安装孔(301)过盈配合并通过紧定螺钉固定,所述轴承挡塞(7)采用天然橡胶加工并采用过盈配合安装。
4.根据权利要求2所述的一种具有减振缓冲功能的工业外骨骼机器人踝关节,其特征在于,所述小腿支撑杆组件(20)包括小腿支撑杆(21)和导向封闭盖板(5),其中,所述小腿支撑杆(21)设有档位槽(201)和减重槽(208),其通过档位槽(201)与小腿支撑壳体(22)滑动配合连接;所述导向封闭盖板(5)固连到所述小腿支撑杆(21)下端。
5.根据权利要求4所述的一种具有减振缓冲功能的工业外骨骼机器人踝关节,其特征在于,所述固定绑带连接件(9)、左盖板(3)、右盖板(4)、导向封闭盖板(5)均采用铝合金加工,所述小腿支撑杆(21)采用不锈钢材料加工,所述固定绑带(10)采用尼龙材。
6.根据权利要求1所述的一种具有减振缓冲功能的工业外骨骼机器人踝关节,其特征在于,所述减振缓冲机构(40)包括减振弹簧(11)和导向轴(12),所述踝关节支撑件(1)内设有轴安装孔(311)及限位销孔(312),通过轴安装孔(311)装有导向轴(12),并通过限位销轴(13)对导向轴(12)固定,所述减振弹簧(11)穿过所述导向轴(12),并且两端分别与踝关节支撑件(1)和小腿支撑杆组件(30)抵连。
7.根据权利要求4所述的一种具有减振缓冲功能的工业外骨骼机器人踝关节,其特征在于,所述小腿支撑杆(21)下端设有限位突起(203),踝关节支撑件(1)上方、左盖板(3)和右盖板(4)上均设有滑动凹槽,所述滑动凹槽配合形成封闭空间(305),所述限位突起(203)在所述封闭空间(305)内滑动,通过对所述封闭空间(305)及所述限位突起(203)的尺寸设计控制所述小腿支撑杆(21)的缓冲行程。
8.根据权利要求4所述的一种具有减振缓冲功能的工业外骨骼机器人踝关节,其特征在于,所述小腿支撑杆(21)下端设有容置凹槽(206),与所述踝关节支撑件(1)内的容置凹槽(307)配合形成缓冲机构的容置腔体(308);所述踝关节支撑件(1)上设有导向滑槽(302),所述导向封闭盖板(5)在导向滑槽(302)内滑动,二者配合实现对所述减震缓冲机构容置腔体(308)的封闭。
9.根据权利要求6所述的一种具有减振缓冲功能的工业外骨骼机器人踝关节,其特征在于,所述减振弹簧(11)为压缩弹簧、矩形弹簧或者气弹簧,其刚度系数k为:
10.根据权利要求9所述的一种具有减振缓冲功能的工业外骨骼机器人踝关节,其特征在于,所述压紧力fn可通过下式计算:
技术总结
本发明公开了一种具有减振缓冲功能的工业外骨骼机器人踝关节,涉及外骨骼机器人技术领域,包含小腿支撑杆组件、减振缓冲机构、踝关节支撑机构,其中小腿支撑杆组件与小腿壳体连接,踝关节支撑机构与地面接触,减振缓冲机构位于小腿支撑杆组件与踝关节支撑机构形成的腔体空间内;三者配合可以实现工业外骨骼机器人在行进过程中的减振缓冲。本发明针对人体行进过程中外骨骼设备与地面接触产生的冲击力,通过踝关节减振缓冲结构中的减振弹簧进行抵消,从而减少外骨骼与地面接触带来的振动冲击,增强外骨骼设备的可靠性,提高使用者的穿戴舒适性。
技术研发人员:王宏亮,梁乐,胡明伟,田易,刘汉鼎,欧国峰,李晓航
受保护的技术使用者:中船重工信息科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!