一种工业机器人的智能控制系统的制作方法
本发明涉及工业机器人的技术的领域,尤其涉及一种工业机器人的智能控制系统。
背景技术:
1、工业机器人又称机械手,主要用于机械化加工生产,工业机器人一般通过智能控制系统自动控制,作业过程中智能控制系统通过编程和各种传感器反馈的数据来控制工业机器人的移动和控制作业设备作业,目前作业设备与工业机器人之间的安装方案具有两种,一是作业设备与工业机器人刚性连接,优点是移动时不会影响外部传感器的正常工作,但是在加工生产过程中,作业设备与待加工件的接触刚度大,因此需要作业设备与待加工件精确接触,否则就容易出现作业设备与待加工件产生碰撞而造成损坏,作业过程中对机械手的移动精度要求高,这就需要智能控制系统有较高的控制精度,其控制成本高;二是作业设备与工业机器人柔性连接,加工生产过程中作业设备与待加工件的接触刚度小,优点是对工业机器人的移动精度要求相对较低,可降低控制成本,但是在移动过程中为了降低作业设备抖动需要损失工业机器人的移动速度,进而会影响作业效率,为此亟需一种控制成本低且不影响作业效率的工业机器人的智能控制系统。
技术实现思路
1、本发明为了解决上述技术问题提供一种工业机器人的智能控制系统,其能够使作业设备进行快速、稳定性高的运动,同时控制成本低。
2、为达到上述目的,本发明采用的技术方案如下:
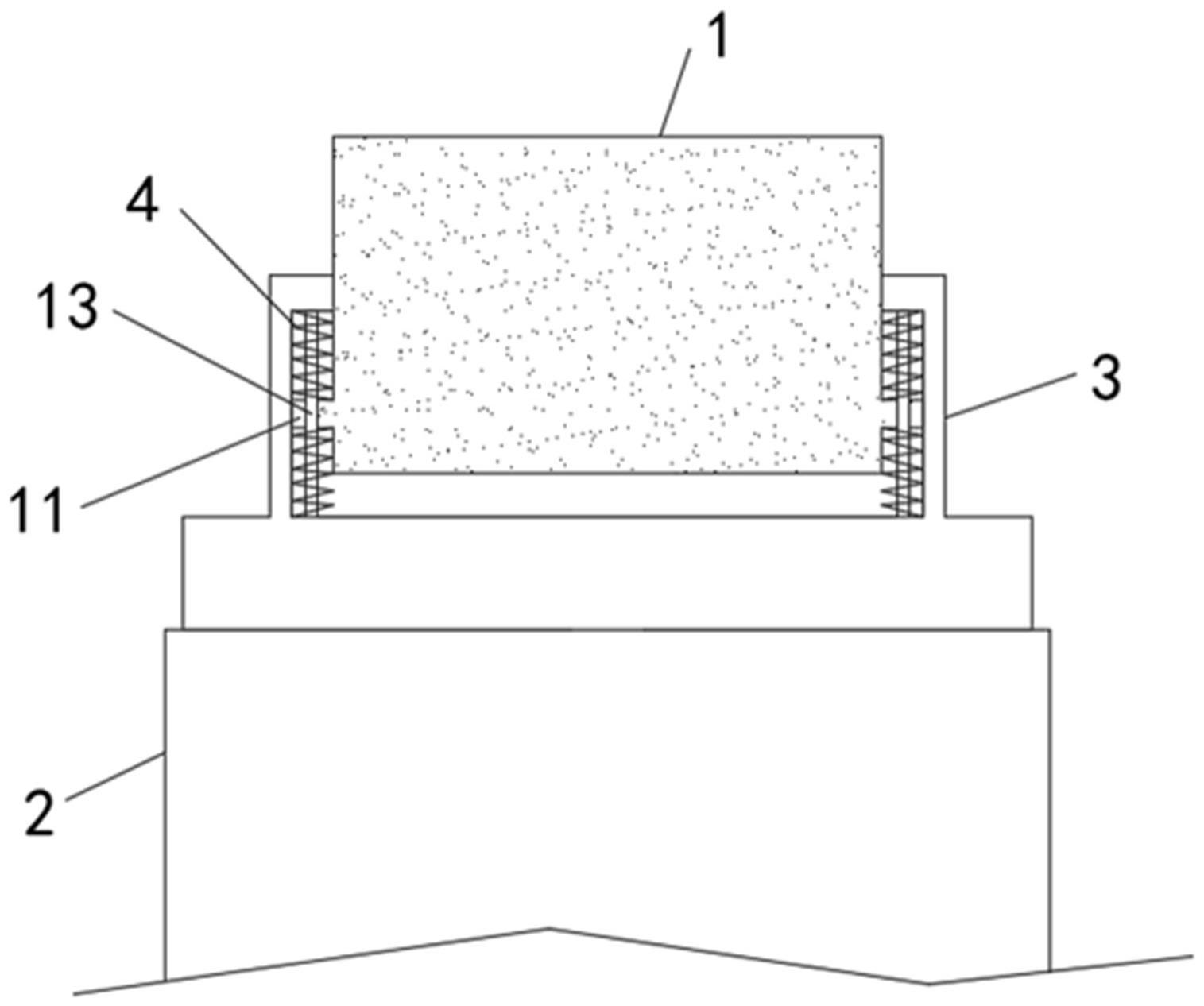
3、一种工业机器人的智能控制系统,包括作业设备装配结构,作业设备装配结构包括用于安装作业设备的装配座和安装在机器人作业端上用于安装装配座的连接座,连接座上开设有安装槽,装配座的周侧具有可在安装槽内活动的限位台,限位台的顶部和底部分别与安装槽的顶部和底部之间通过多个处于压缩程度的弹簧连接,处于压缩状态的弹簧在受力时还可被继续压缩,装配座的底部与安装槽的槽底之间具有调节间隙,本方案中利用弹簧的弹力限定装配座的布置位置,使得装配座的位置相对固定,在机械手移动过程中可保证作业设备位置的稳定性,相对的在快速移动过程中可避免作业设备出现抖动,同时装配座在受力时可在一定范围内活动,使得装配座与连接座之间的连接刚度可发生变化,进而作业设备在与待加工件接触时,装配座与连接座之间的连接刚度可自动适应作业设备与待加工件之间的接触力,从而降低对工业机器人的移动精度要求,使得智能控制系统可减少对传感器的需求及要求,达到降低控制成本的目的。
4、优选的,限位台上开设有多个限位孔,每个限位孔上均贯穿有可活动的限位杆,限位杆的顶端和底端分别抵靠在安装槽的顶部和底部,弹簧套设在限位杆上,避免弹簧在形变的过程中发生位移,避免弹簧脱离预设的位置。
5、优选的,作业设备装配结构还包括用于调配弹簧压缩程度的调节机构,实现对弹簧压缩程度的主动调节,一方面更加方便将装配座装配到连接座上,另一方面实现主动调节装配座与连接座之间的连接刚度。
6、具体的,调节机构包括置于调节间隙内且可沿限位杆长度方向活动的调节板、开设在作业端的调节腔、装配在调节腔上的调节装置,调节装置包括调节杆,连接座底部具有贯通安装槽的避让孔,调节杆贯穿避让孔且与调节板抵接,调节板具有多个装配孔,且多根限位杆一一穿过多个装配孔,位于限位台底部的弹簧抵接在调节板上。
7、与现有技术相比,本发明具有以下有益效果:
8、本发明通过改变原有作业设备和机器人作业端之间的安装结构,使得工业机器人的智能控制系统在控制工业机器人作业时,既可保证作业效率,还可降低控制成本。
9、本发明所公开的工业机器人的智能控制系统,通过对原有作业设备和机器人作业端之间的安装结构改进,一方面使得工业机器人在快速移动的过程中可避免作业设备出现抖动,进而保证作业效率,另一方面使得作业设备和机器人作业端之间的连接刚度可自动适应并抵消作业设备与代加工件之间的接触力,从而使得作业设备对工业机器人的移动精度要求降低,使得智能控制系统可减少对传感器对传感器的需求及要求,达到降低控制成本的目的。
技术特征:
1.一种工业机器人的智能控制系统,其特征在于,包括作业设备装配结构,作业设备装配结构包括用于安装作业设备的装配座(1)和安装在机器人作业端(2)上用于安装装配座(1)的连接座(3),连接座(3)上开设有安装槽(31),装配座(1)的周侧具有可在安装槽(31)内活动的限位台(11),限位台(11)的顶部和底部分别与安装槽(31)的顶部和底部之间通过多个处于压缩程度的弹簧(4)连接,利用弹簧(4)的弹力限定装配座(1)的布置位置,处于压缩状态的弹簧(4)在受力时还可被继续压缩,装配座(1)的底部与安装槽(31)的槽底之间具有调节间隙。
2.根据权利要求1所述的工业机器人的智能控制系统,其特征在于,安装槽(31)为闭合的封闭结构,且在顶部闭合面的中心点开设有供装配座(1)通过的缺口(32),连接座(3)沿安装槽(31)的轴对称线分割成两个可拆卸连接的结构块。
3.根据权利要求2所述的工业机器人的智能控制系统,其特征在于,限位台(11)上开设有多个限位孔(12),每个所述限位孔(12)上均贯穿有可活动的限位杆(13),限位杆(13)的顶端和底端分别抵靠在安装槽(31)的顶部和底部,弹簧(4)套设在限位杆(13)上。
4.根据权利要求3所述的工业机器人的智能控制系统,其特征在于,作业设备装配结构还包括用于调配弹簧(4)压缩程度的调节机构(5),调节机构(5)包括置于调节间隙内且可沿限位杆(13)长度方向活动的调节板(51)、开设在作业端(2)的调节腔(52)、装配在调节腔(52)上的调节装置(53),调节装置(53)包括调节杆(531),连接座(3)底部具有贯通安装槽(31)的避让孔(33),调节杆(531)贯穿避让孔(33)且与调节板(51)抵接,调节板(51)具有多个装配孔(511),且多根所述限位杆(13)一一穿过多个所述装配孔(511),位于限位台(11)底部的弹簧(4)抵接在调节板(51)上。
5.根据权利要求4所述的工业机器人的智能控制系统,其特征在于,调节装置(53)还包括第一气泵(532)、第一密闭阀门(533)和用于控制第一气泵(532)与第一密闭阀门(533)启闭状态的第一控制器,调节杆(531)远离调节板(51)的一端套设有与调节腔(52)腔壁贴合的橡胶套(534),第一气泵(532)通过连接管接通调节腔(52)的底部,连接管上设有单向阀,作业端(2)上还开设有与调节腔(52)底部接通的泄压管路(535),且密闭阀门设于泄压管路(535)上。
6.根据权利要求4所述的工业机器人的智能控制系统,其特征在于,调节装置(53)还包括第二气泵(536)、气囊(537)、第二密闭阀门(538)和用于控制第二气泵(536)及第二密闭阀门(538)启闭状态的第二控制器,气囊(537)置于调节腔(52)内且位于调节杆(531)的底部,第二气泵(536)通过连接管贯通调节腔(52)且与气囊(537)接通,连接管上也设有单向阀,气囊(537)具有排气孔,且第二密闭阀门(538)安装在排气孔内。
7.根据权利要求6所述的工业机器人的智能控制系统,其特征在于,调节杆(531)可滑动的安装在调节腔(52)上,且调节杆(531)的边沿与调节腔(52)的腔壁之间具有排气间隙,排气孔的排气端接通有排气管(6),排气管(6)延伸至排气间隙内,作业端(2)开设有多条贯通排气间隙的排气通道。
技术总结
本发明公开一种工业机器人的智能控制系统,包括作业设备装配结构,作业设备装配结构包括用于安装作业设备的装配座和安装在机器人作业端上用于安装装配座的连接座,连接座上开设有安装槽,装配座的周侧具有可在安装槽内活动的限位台,限位台的顶部和底部分别与安装槽的顶部和底部之间通过多个处于压缩程度的弹簧连接,利用弹簧的弹力限定装配座的布置位置,处于压缩状态的弹簧在受力时还可被继续压缩,装配座的底部与安装槽的槽底之间具有调节间隙;本发明通过改变原有作业设备和机器人作业端之间的安装结构,使得工业机器人的智能控制系统在控制工业机器人作业时,既可保证作业效率,还可降低控制成本。
技术研发人员:颜明华
受保护的技术使用者:成都广泰威达数控技术股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!