本发明涉及机械手体感识别控制,具体地说,涉及基于支撑向量机的机械手体感识别控制系统。
背景技术:
1、随着科技发展,机械手其应用也变得十分广泛,机械手的应用在工业,化学,服务业等领域发挥着不可估量的作用,因此,可应用于复杂场景的机械手作为科学探索,工业生产等领域必不可少的重要设备,尤其在人不方便工作的极限环境中具有不可替代的重要地位,但是,现有的机械手基于统计学习的方法,难以处理非线性问题,导致机械手体体感识别精度低,而且进行传感处理时,存在噪声干扰,影响传感数据质量,现有的机械手体感识别过程中,不能对机械手体感数据进行异常检测,存在安全隐患。
2、为了应对上述问题,现亟需基于支撑向量机的机械手体感识别控制系统。
技术实现思路
1、本发明的目的在于提供基于支撑向量机的机械手体感识别控制系统,以解决上述背景技术中提出的问题。
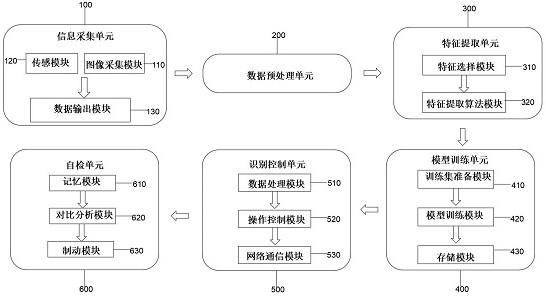
2、为实现上述目的,提供了基于支撑向量机的机械手体感识别控制系统,包括信息采集单元、数据预处理单元、特征提取单元、模型训练单元、识别控制单元和自检单元;
3、所述信息采集单元用于采集机械手周围环境图像信息,同时对周围环境的深度信息进行感应采集;
4、所述数据预处理单元用于接收信息采集单元的相关信息,对图像信息和深度信息进行预处理,得到去除图像和深度信息中的噪声成分;
5、所述特征提取单元用于接收数据预处理单元预处理的图像信息和深度信息,并提取信息中的特征部分;
6、所述模型训练单元用于准备训练集数据,通过支撑向量机算法对特征向量进行训练,建立机械手体感识别模型;
7、所述识别控制单元用于接收特征提取单元的特征数据,通过支撑向量机模型对特征数据进行识别,根据识别结果操控机械手进行相应的动作;
8、所述自检单元用于对机械手体感进行记忆,通过与以往的体感进行比对,检测到机械手异常采取制动措施。
9、作为本技术方案的进一步改进,所述信息采集单元包括图像采集模块、传感模块和数据传输模块;
10、所述图像采集模块用于采集周围环境的图像信息;
11、所述传感模块用于采集周围环境的深度信息;
12、所述数据传输模块用于对图像采集模块和传感模块采集的环境信息进行传输。
13、作为本技术方案的进一步改进,所述特征提取单元包括特征选择模块和特征提取算法模块;
14、所述特征选择模块用于接收数据预处理单元信息并分析选择与操作状态密切相关的特征;
15、所述特征提取算法模块用于利用支撑向量机算法对预处理后的数据进行特征提取,生成机械手操作状态的特征向量,支撑向量机算法如下:
16、;
17、其中,是输入的数据向量,是分隔超平面的法向量,是超平面的偏移量,是符号函数,用于根据的正负值来判断数据点所属的类别。
18、作为本技术方案的进一步改进,所述模型训练单元包括训练集准备模块和模型训练模块;
19、所述训练集准备模块用于准备被标记的训练集数据;
20、所述模型训练模块用于通过支撑向量机算法对训练集数据进行训练,建立机械手体感识别模型。
21、作为本技术方案的进一步改进,所述模型训练单元还包括存储模块,所述存储模块用于存储训练数据集、模型参数和操作记录数据。
22、作为本技术方案的进一步改进,所述识别控制单元包括数据处理模块和操作控制模块;
23、所述数据处理模块用于接收环境数据并传入特征提取单元中支撑向量机模型进行识别;
24、所述操作控制模块用于接收数据处理模块识别结果,控制机械手执行相应的动作。
25、作为本技术方案的进一步改进,所述操作控制模块采用pid算法对机械手进行控制执行动作,所述pid算法公式如下:
26、;
27、其中,表示控制器的输出信号,表示当前时刻的误差,、、为控制器的比例、积分和微分系数,分别用来控制输出信号的比例、积分和微分作用。
28、作为本技术方案的进一步改进,所述识别控制单元还包括网络通信模块,所述网络通信模块用于与外部设备或系统进行数据交换和控制命令传递。
29、作为本技术方案的进一步改进,所述自检单元包括记忆模块、对比分析模块和制动模块;
30、所述记忆模块用于对机械手相同作业时体感进行记忆;
31、所述对比分析模块基于记忆模块的体感记忆,对于相同作业时的体感进行对比分析;
32、所述制动模块用于接收对比分析模块对比分析结果,检测到机械手异常采取制动措施。
33、与现有技术相比,本发明的有益效果:
34、1、该基于支撑向量机的机械手体感识别控制系统中,传统的机械手体感识别控制系统常使用基于统计学习的方法,而该专利引入了支撑向量机算法,将其应用于机械手体感识别控制系统中,具有更强的泛化能力和较好的处理非线性问题的能力。这种创新的应用使得机械手体感识别控制系统在准确性和鲁棒性方面有了显著提升。
35、2、该专利中的数据预处理模块对传感器数据进行噪声去除和数据归一化处理,有效地消除了数据中的噪声干扰,提高了数据的质量,同时,特征提取模块通过支撑向量机算法对数据进行特征提取,选取与机械手操作状态密切相关的特征,这种数据预处理和特征提取的方式能够更好地捕捉和表达操作状态的关键特征,提高了体感识别的准确性和鲁棒性,同时,通过自检单元对机械手体感数据进行异常检测,判断是否存在异常操作或故障情况,并采取相应的安全措施,提高机械手体感识别控制系统的安全性能。
技术特征:1.基于支撑向量机的机械手体感识别控制系统,其特征在于:包括信息采集单元(100)、数据预处理单元(200)、特征提取单元(300)、模型训练单元(400)、识别控制单元(500)和自检单元(600);
2.根据权利要求1所述的基于支撑向量机的机械手体感识别控制系统,其特征在于:所述信息采集单元(100)包括图像采集模块(110)、传感模块(120)和数据传输模块(130);
3.根据权利要求1所述的基于支撑向量机的机械手体感识别控制系统,其特征在于:所述特征提取单元(300)包括特征选择模块(310)和特征提取算法模块(320);
4.根据权利要求1所述的基于支撑向量机的机械手体感识别控制系统,其特征在于:所述模型训练单元(400)包括训练集准备模块(410)和模型训练模块(420);
5.根据权利要求4所述的基于支撑向量机的机械手体感识别控制系统,其特征在于:所述模型训练单元(400)还包括存储模块(430),所述存储模块(430)用于存储训练数据集、模型参数和操作记录数据。
6.根据权利要求1所述的基于支撑向量机的机械手体感识别控制系统,其特征在于:所述识别控制单元(500)包括数据处理模块(510)和操作控制模块(520);
7.根据权利要求6所述的基于支撑向量机的机械手体感识别控制系统,其特征在于:所述操作控制模块(520)采用pid算法对机械手进行控制执行动作,所述pid算法公式如下:
8.根据权利要求6所述的基于支撑向量机的机械手体感识别控制系统,其特征在于:所述识别控制单元(500)还包括网络通信模块(530),所述网络通信模块(530)用于与外部设备或系统进行数据交换和控制命令传递。
9.根据权利要求1所述的基于支撑向量机的机械手体感识别控制系统,其特征在于:所述自检单元(600)包括记忆模块(610)、对比分析模块(620)和制动模块(630);
技术总结本发明涉及机械手体感识别控制技术领域,具体地说,涉及基于支撑向量机的机械手体感识别控制系统,包括信息采集单元、数据预处理单元、特征提取单元、模型训练单元、识别控制单元和自检单元,信息采集单元用于采集机械手周围环境图像信息,同时对周围环境的深度信息进行感应采集,数据预处理单元用于接收信息采集单元的相关信息,对图像信息和深度信息进行预处理,特征提取单元用于接收数据预处理单元预处理的图像信息和深度信息,模型训练单元用于准备训练集模块,通过支撑向量机算法对特征向量进行训练,建立机械手体感识别模型,识别控制单元用于处理接收实时数据预处理单元数据,并将其传入模型训练单元中支撑向量机模型进行识别。
技术研发人员:李瑞学
受保护的技术使用者:甘肃云梯信息科技有限公司
技术研发日:技术公布日:2024/1/15