基于DWA算法的塑料管材精准切割方法与流程
:本发明涉及基于dwa算法的塑料管材精准切割方法。
背景技术
0、
背景技术:
1、塑料管材作为化学建材的重要组成部分,以其优越的性能,卫生、环保、低耗等优点为用户所广泛接受,主要有upvc排水管、upvc给水管、铝塑复合管、聚乙烯给水管材、聚丙烯ppr热水管这几种。
2、塑料管材与传统的铸铁管、镀锌钢管、水泥管等管道相比,具有节能节材、环保、轻质高强、耐腐蚀、内壁光滑不结垢、施工和维修简便、使用寿命长等优点,广泛应用于建筑给排水、城乡给排水、城市燃气、电力和光缆护套、工业流体输送、农业灌溉等建筑业、市政、工业和农业领域。
3、在塑料管材的制备过程中,塑料管材的精准切割是其中一个重要环节,一般情况下,塑料管材是由机床带动,一边平移一边自旋转,根据用户的实际需求,移动到指定切割位置来进行切割,得到规定尺寸的塑料管材;实际操作过程中,塑料管材的指定切割位置是由机床的程序算法设定完成的,切割位置为切割面形式,切割位置是固定设定的,只参照了塑料管材的具体尺寸,不能根据塑料管材的实时移动速度、旋转角度和管材的形变量来动态调整切割位置,导致一批次塑料管材切割的精准度和灵活性不能满足复杂切割场景的实际应用需求,尤其对于一些精度要求很高的塑料管材,采用固定设定切割面的切割形式得到的产品总会存在误差,使得到的塑料管材成品质量稂莠不齐。
技术实现思路
0、
技术实现要素:
1、本发明实施例提供了基于dwa算法的塑料管材精准切割方法,方法设计合理,在动态窗口算法的基础上,建立管材切割坐标系,结合塑料管材的实时移动速度、旋转角度和环境变化对塑料管材产生的形变量来动态调整塑料管材的切割位置,并且切割位置的确定是由在管材切割坐标系内的多个切割点来确定的,相较于切割面的形式精准度更高,而切割点的数量和具体的坐标数据会采用自适应调节参数的方式进行调节设定,根据塑料管材的实时变化参数来进一步得到精准度高的切割位置,尽可能减少塑料管材成品的切割误差,得到精准度更高的塑料管材成品,从而保证一批次的塑料管材成品都属于较高的质量,解决了现有技术中存在的问题。
2、本发明为解决上述技术问题所采用的技术方案是:
3、基于dwa算法的塑料管材精准切割方法,所述精准切割方法包括以下步骤:
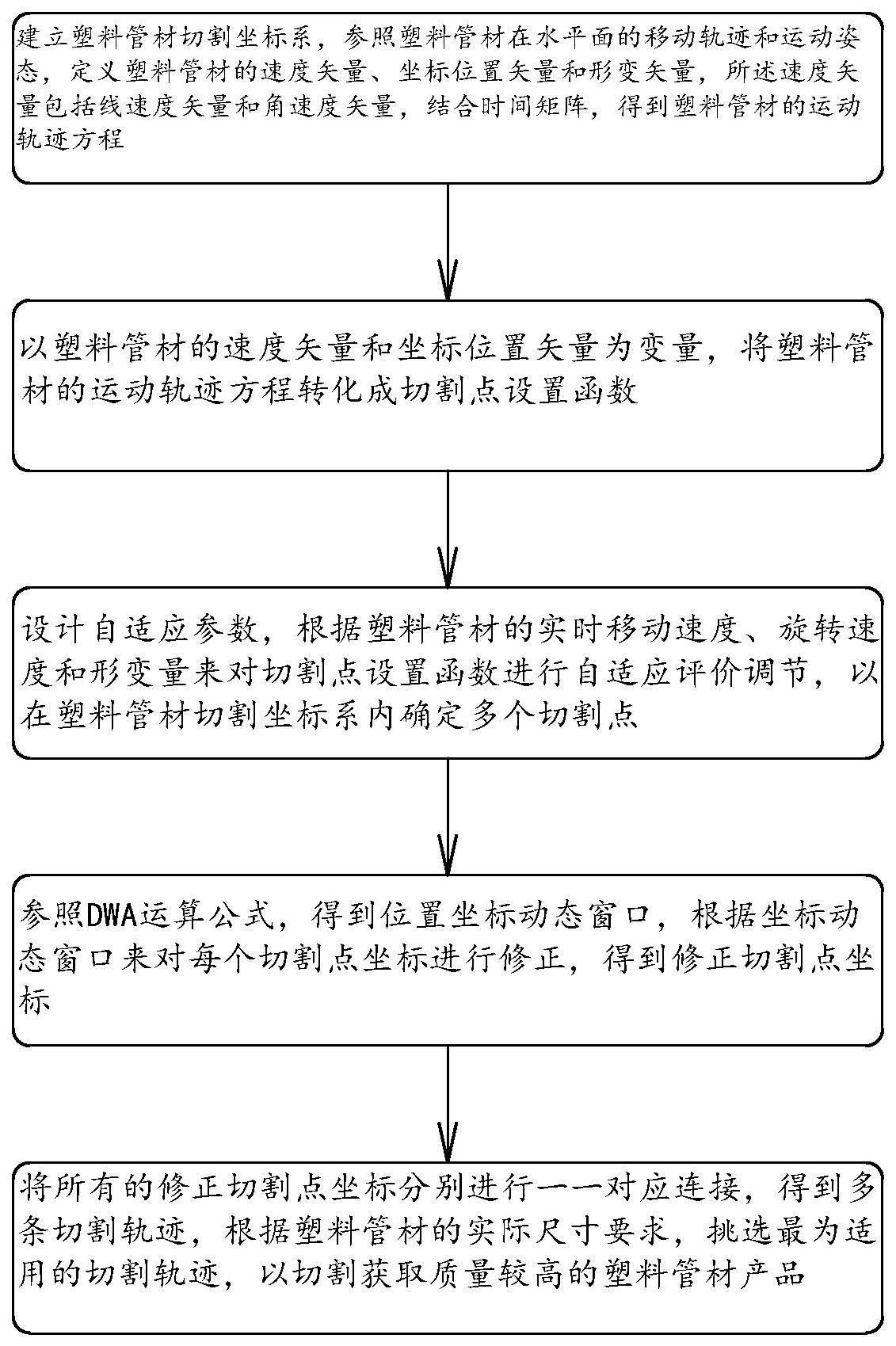
4、s1,建立塑料管材切割坐标系,参照塑料管材在水平面的移动轨迹和运动姿态,定义塑料管材的速度矢量、坐标位置矢量和形变矢量,所述速度矢量包括线速度矢量和角速度矢量,结合时间矩阵,得到塑料管材的运动轨迹方程;
5、s2,以塑料管材的速度矢量和坐标位置矢量为变量,将塑料管材的运动轨迹方程转化成切割点设置函数;
6、s3,设计自适应参数,根据塑料管材的实时移动速度、旋转速度和形变量来对切割点设置函数进行自适应评价调节,以在塑料管材切割坐标系内确定多个切割点;
7、s4,参照dwa运算公式,得到位置坐标动态窗口,根据坐标动态窗口来对每个切割点坐标进行修正,得到修正切割点坐标;
8、s5,将所有的修正切割点坐标分别进行一一对应连接,得到多条切割轨迹,根据塑料管材的实际尺寸要求,挑选最为适用的切割轨迹,以切割获取质量较高的塑料管材产品。
9、所述塑料管材的运动轨迹方程为:
10、
11、
12、其中,x(t)=[u(t),v(t)]t为塑料管材的速度矢量,z(t)=[x(t),y(t)]t为塑料管材的位置坐标矢量,u(t)=[δr(t),n(t)]t为塑料管材的形变矢量,δr(t)和n(t)分别为塑料管材的竖直形变量和水平形变量;
13、所述函数f和函数g是塑料管材受力到运动的映射,包括驱动力和摩擦力;c为在塑料管材切割坐标系校验系数,以判断切割点坐标的真实性;函数h反映了在塑料管材的速度矢量和位置坐标矢量的配对关系。
14、设计自适应参数,根据塑料管材的实时移动速度、旋转速度和形变量来对切割点设置函数进行自适应评价调节,以在塑料管材切割坐标系内确定多个切割点包括以下步骤:
15、s3.1,定义塑料管材的移动距离阈值范围ds;
16、s3.2,以dmin表示塑料管材到最近切割点的移动距离,α0、β0、γ0为旋转速度、移动速度和形变量的初始参数,αmax、γmin分别为初始参数的上下界,μ、ρ为常数,则自适应参数设计为:
17、
18、
19、s3.3,将自适应参数与切割点设置函数进行适配调节,所述切割点设置函数为:
20、ga(u,r)=αa·heading(u,r)+βa·dist(u,r)+γa·velocity(u,r)
21、其中,heading(u,r)是塑料管材的旋转角度评价分量;dist(u,r)为塑料管材与最近切割点物之间的距离评价分量;ve/ocity(u,r)是塑料管材在移动过程中形变量评价分量;
22、s3.4,对切割点设置函数进行解析,得到每个切割点的坐标参量(u,r)。
23、所述位置坐标动态窗口为:
24、
25、加入时间参量t,对每个切割点坐标的模进行修正计算,得到修正切割点坐标。
26、将所有的修正切割点坐标分别进行一一对应连接,得到多条切割轨迹,根据塑料管材的实际尺寸要求,挑选最为适用的切割轨迹包括以下步骤:
27、s5.1,所有的修正切割点坐标分别进行一一对应连接得到切割轨迹网络;
28、s5.2,根据塑料管材的前进方向去除与塑料管材不相交的切割轨迹;
29、s5.3,参照塑料管材的实际尺寸要求,选取两条最优切割轨迹进行切割。
30、本发明采用上述结构,通过建立塑料管材切割坐标系,参照塑料管材在水平面的移动轨迹和运动姿态,定义塑料管材的速度矢量、坐标位置矢量和形变矢量,得到塑料管材的运动轨迹方程;通过以塑料管材的速度矢量和坐标位置矢量为变量,将塑料管材的运动轨迹方程转化成切割点设置函数来确定多个切割点;通过参照自适应参数,对切割点设置函数进行评价调节,得到更为精准的切割点坐标;通过dwa运算公式得到的位置坐标动态窗口对每个切割点进行修正,得到修正切割点坐标,具有精准实用、快捷高效的优点。
技术特征:
1.基于dwa算法的塑料管材精准切割方法,其特征在于,所述精准切割方法包括以下步骤:
2.根据权利要求1所述的基于dwa算法的塑料管材精准切割方法,其特征在于,所述塑料管材的运动轨迹方程为:
3.根据权利要求1所述的基于dwa算法的塑料管材精准切割方法,其特征在于,设计自适应参数,根据塑料管材的实时移动速度、旋转速度和形变量来对切割点设置函数进行自适应评价调节,以在塑料管材切割坐标系内确定多个切割点包括以下步骤:
4.根据权利要求1所述的基于dwa算法的塑料管材精准切割方法,其特征在于,所述位置坐标动态窗口为:
5.根据权利要求1所述的基于dwa算法的塑料管材精准切割方法,其特征在于,将所有的修正切割点坐标分别进行一一对应连接,得到多条切割轨迹,根据塑料管材的实际尺寸要求,挑选最为适用的切割轨迹包括以下步骤:
技术总结
基于DWA算法的塑料管材精准切割方法,所述精准切割方法包括以下步骤:建立塑料管材切割坐标系,参照塑料管材在水平面的移动轨迹和运动姿态,定义塑料管材的速度矢量、坐标位置矢量和形变矢量,结合时间矩阵,得到塑料管材的运动轨迹方程;以塑料管材的速度矢量和坐标位置矢量为变量,将塑料管材的运动轨迹方程转化成切割点设置函数;设计自适应参数,根据塑料管材的实时移动速度、旋转速度和形变量来对切割点设置函数进行自适应评价调节;参照DWA运算公式,得到位置坐标动态窗口,根据坐标动态窗口来对每个切割点坐标进行修正,得到修正切割点坐标;挑选最为适用的切割轨迹,以切割获取质量较高的塑料管材产品。
技术研发人员:王志民,王荣美
受保护的技术使用者:山东华纳塑胶集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!