一种智慧工厂监控机器人的制作方法
本发明涉及工厂监控,特别是一种智慧工厂监控机器人。
背景技术:
1、智慧工厂是现代工厂信息化发展的新阶段,是在数字化工厂的基础上,利用物联网的技术和设备监控技术加强信息管理和服务;清楚掌握产销流程、提高生产过程的可控性、减少生产线上人工的干预、即时正确地采集生产线数据,以及合理的生产计划编排与生产进度,并加上绿色智能的手段和智能系统等新兴技术于一体,构建一个高效节能的、绿色环保的、环境舒适的人性化工厂,由于智慧工厂智能化程度高,工人数量较少,就需要监控机器人对智慧工厂进行监控防护,在发现安全隐患时及时预警。
2、在中国专利cn112432011a中公开的一种智慧工厂监控设备,该智慧工厂监控设备通过舵机转动制动卡块卡住齿轮盘,再通过第一伺服电机带动螺纹杆转动,使得安装块上的连接块在开槽中上下滑动,以此实现设备主体的高度调整,调整角度时控制舵机转动制动卡块与齿轮盘分离,再驱动第一伺服电机,因为齿轮盘中部设置有阻尼橡胶块,所以当制动卡块与齿轮盘分离时第一伺服电机的转轴会带着齿轮盘、安装管以及设备主体一起转动,以此实现设备主体拍摄角度的调整。
3、现有智慧工厂监控机器人的缺点:现有智慧工厂监控机器人为固定全方位监控或者可移动式监控机器人,可移动式监控机器人的底部一般由移动轮支撑且野了方便移动自身重量较轻,稳定性相对直接固定的监控机器人较差,当可移动监控机器人需要在某地进行长时间固定监控时,由于工厂内面积利用率高,机器人容易被车辆等磕碰翻倒造成损坏。
技术实现思路
1、本发明的目的在于克服现有技术的缺点,提供一种智慧工厂监控机器人,有效解决了现有技术的不足。
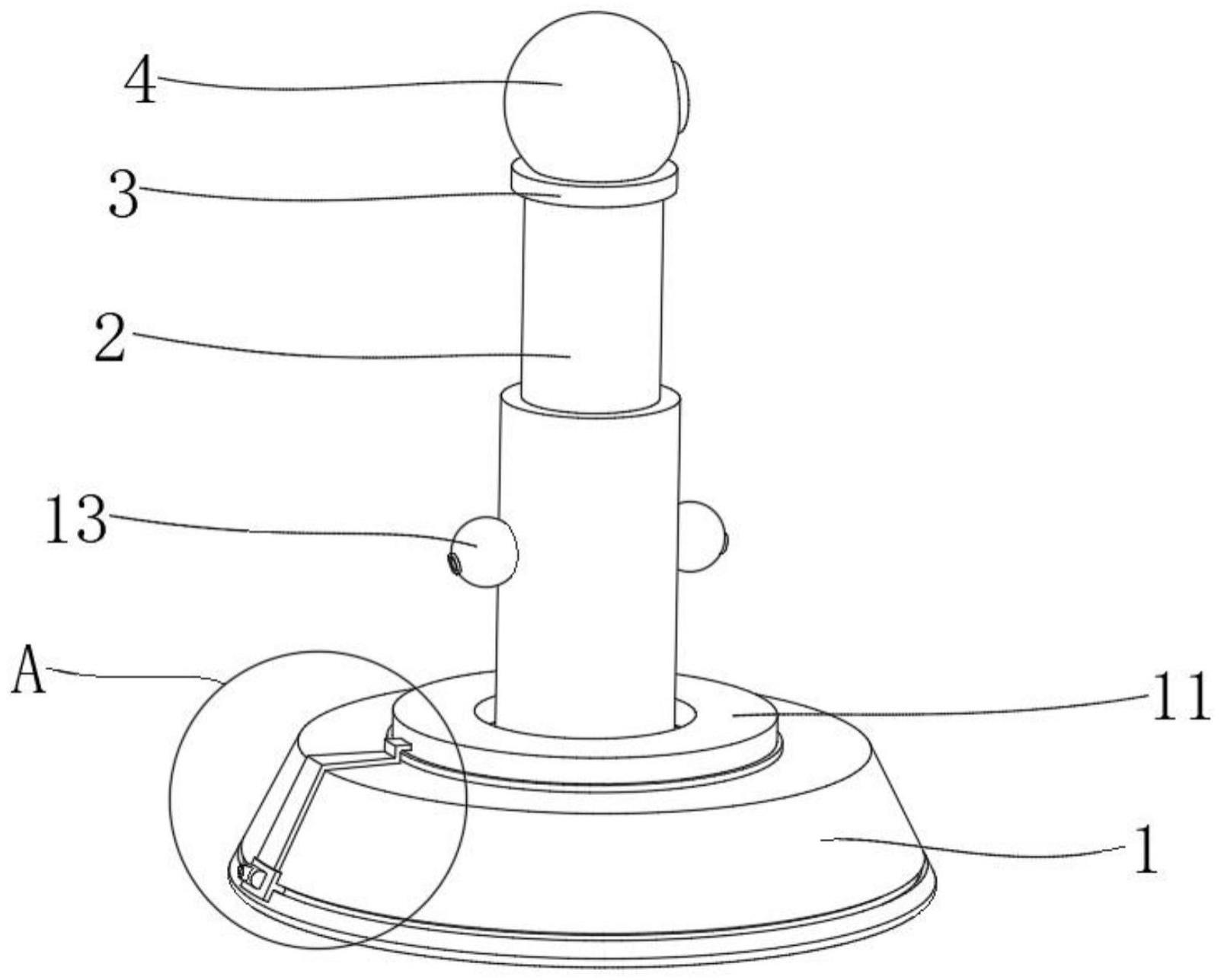
2、本发明的目的通过以下技术方案来实现:一种智慧工厂监控机器人,包括底盘,所述底盘顶部的中心处固定连接有电动推杆,所述电动推杆的顶部转动连接有电动转盘,所述电动转盘的顶部固定连接有第一监控摄像头,所述底盘的底部开设有四个收纳槽,所述收纳槽内均转动连接有电动转轴,所述电动转轴的底部固定连接有万向驱动轮,所述电动转轴的另一侧固定连接有吸盘,所述底盘底部的外侧转动连接有第二监控摄像头。
3、可选的,所述底盘为圆台状,所述底盘的重量大于电动推杆的重量。
4、采用上述技术方案:通过将底盘设置为圆台状提高其底部面积,同时能够增加底盘的重量来降低该监控机器人的重心,从而提高其稳定性。
5、可选的,所述收纳槽的顶部为圆形,所述收纳槽的底部为方形,所述电动转轴的轴心与收纳槽的轴心相重合。
6、可选的,所述万向驱动轮的底部到电动转轴的距离小于收纳槽的半径,所述万向驱动轮处于竖直状态时底部高度低于底盘的底部高度。
7、可选的,所述吸盘与万向驱动轮呈九十度夹角,所述吸盘处于竖直吸附状态时底部高度与底盘的底部高度相等,所述吸盘的主体部分向万向驱动轮方向倾斜。
8、采用上述技术方案:通过在底盘底部设置收纳槽,当需要该机器人移动进行巡逻监控时机,使万向驱动轮处于竖直状态与地面接触,由四个万向驱动轮配合带动监控机器人进行移动,当需要将该监控机器人固定进行定点监控时,可以将吸盘转动至竖直状态与地面吸附提高底盘的稳定性,从而使监控机器人能够承受更大的冲击力,降低在工厂车间内定点监控时被磕碰翻倒造成损坏的情况,将吸盘的主体部分向万向驱动轮方向倾斜能够使吸盘在转动至竖直状态的过程中能够逐渐与地面相切并贴合,使吸盘与地面吸附固定的过程更加顺畅。
9、可选的,所述电动转轴单次转动的角度为九十度,所述底盘需要移动时万向驱动轮处于竖直状态,所述底盘需要固定时使电动转轴转动九十度,所述底盘需要回复移动时将电动转轴复位。
10、可选的,同侧两个所述收纳槽内的吸盘方向相对,所述收纳槽的宽度大于吸盘的直径。
11、采用上述技术方案:通过将同侧两个吸盘的方向设置为相反的状态,当转换为固定状态时,万向驱动轮和吸盘与地面产生摩擦力相反能够相互抵消,避免两者转动与地面的摩擦力同向使监控机器人的固定位置偏移的情况。
12、可选的,所述底盘底部的外侧开设有滑槽,所述滑槽环绕底盘一周,所述底盘通过滑槽与第二监控摄像头转动连接,所述滑槽截面形状为t形。
13、采用上述技术方案:通过在底盘的底部外侧设置第二监控摄像头,使该监控机器人能够从底部以仰角对工厂设备进行检测,也能对设备下方地面掉落物料进行搜寻,从而增加该监控机器人的监控视角。
14、可选的,所述底盘的顶部固定连接有空心电动旋转台,所述空心电动旋转台的内径大于电动推杆底部的外径,所述空心电动旋转台的输出端固定连接有衔接杆,所述衔接杆的端部与第二监控摄像头的底部固定连接。
15、采用上述技术方案:通过在底盘的顶部设置空心电动旋转台使其输出端转动带动衔接杆和第二监控摄像头转动,从而使第二监控摄像头能够环绕底盘进行角度调整实现全方位监控。
16、可选的,所述第一监控摄像头为三百六十度全景摄像头,所述电动推杆伸长状态的高度高于一点五米。
17、可选的,所述电动推杆主体部分的两侧均固定连接有路况标识识别装置,所述路况标识识别装置的识别摄像头朝向斜下方。
18、采用上述技术方案:通过在电动推杆的两侧设置路况标识识别装置,使其能够对智慧工厂车间内路面的各种警示线进行识别,使其能够更科学的规划路线,使其巡逻监控过程更加安全。
19、本发明具有以下优点:
20、1、该智慧工厂监控机器人,通过将底盘设置为圆台状提高其底部面积,同时能够增加底盘的重量来降低该监控机器人的重心,从而提高其稳定性,通过在底盘底部设置收纳槽,当需要该机器人移动进行巡逻监控时机,使万向驱动轮处于竖直状态与地面接触,由四个万向驱动轮配合带动监控机器人进行移动,当需要将该监控机器人固定进行定点监控时,可以将吸盘转动至竖直状态与地面吸附提高底盘的稳定性,从而使监控机器人能够承受更大的冲击力,降低在工厂车间内定点监控时被磕碰翻倒造成损坏的情况,将吸盘的主体部分向万向驱动轮方向倾斜能够使吸盘在转动至竖直状态的过程中能够逐渐与地面相切并贴合,使吸盘与地面吸附固定的过程更加顺畅。
21、2、该智慧工厂监控机器人,通过将同侧两个吸盘的方向设置为相反的状态,当转换为固定状态时,万向驱动轮和吸盘与地面产生摩擦力相反能够相互抵消,避免两者转动与地面的摩擦力同向使监控机器人的固定位置偏移的情况,通过在底盘的底部外侧设置第二监控摄像头,使该监控机器人能够从底部以仰角对工厂设备进行检测,也能对设备下方地面掉落物料进行搜寻,从而增加该监控机器人的监控视角。
22、3、该智慧工厂监控机器人,通过在底盘的顶部设置空心电动旋转台使其输出端转动带动衔接杆和第二监控摄像头转动,从而使第二监控摄像头能够环绕底盘进行角度调整实现全方位监控,通过在电动推杆的两侧设置路况标识识别装置,使其能够对智慧工厂车间内路面的各种警示线进行识别,使其能够更科学的规划路线,使其巡逻监控过程更加安全。
技术特征:
1.一种智慧工厂监控机器人,其特征在于:包括底盘(1),所述底盘(1)顶部的中心处固定连接有电动推杆(2),所述电动推杆(2)的顶部转动连接有电动转盘(3),所述电动转盘(3)的顶部固定连接有第一监控摄像头(4),所述底盘(1)的底部开设有四个收纳槽(5),所述收纳槽(5)内均转动连接有电动转轴(6),所述电动转轴(6)的底部固定连接有万向驱动轮(7),所述电动转轴(6)的另一侧固定连接有吸盘(8),所述底盘(1)底部的外侧转动连接有第二监控摄像头(9)。
2.根据权利要求1所述的一种智慧工厂监控机器人,其特征在于:所述底盘(1)为圆台状,所述底盘(1)的重量大于电动推杆(2)的重量。
3.根据权利要求2所述的一种智慧工厂监控机器人,其特征在于:所述收纳槽(5)的顶部为圆形,所述收纳槽(5)的底部为方形,所述电动转轴(6)的轴心与收纳槽(5)的轴心相重合。
4.根据权利要求3所述的一种智慧工厂监控机器人,其特征在于:所述万向驱动轮(7)的底部到电动转轴(6)的距离小于收纳槽(5)的半径,所述万向驱动轮(7)处于竖直状态时底部高度低于底盘(1)的底部高度。
5.根据权利要求4所述的一种智慧工厂监控机器人,其特征在于:所述吸盘(8)与万向驱动轮(7)呈九十度夹角,所述吸盘(8)处于竖直吸附状态时底部高度与底盘(1)的底部高度相等,所述吸盘(8)的主体部分向万向驱动轮(7)方向倾斜。
6.根据权利要求5所述的一种智慧工厂监控机器人,其特征在于:所述电动转轴(6)单次转动的角度为九十度,所述底盘(1)需要移动时万向驱动轮(7)处于竖直状态,所述底盘(1)需要固定时使电动转轴(6)转动九十度,所述底盘(1)需要回复移动时将电动转轴(6)复位。
7.根据权利要求6所述的一种智慧工厂监控机器人,其特征在于:同侧两个所述收纳槽(5)内的吸盘(8)方向相对,所述收纳槽(5)的宽度大于吸盘(8)的直径。
8.根据权利要求7所述的一种智慧工厂监控机器人,其特征在于:所述底盘(1)底部的外侧开设有滑槽(10),所述滑槽(10)环绕底盘(1)一周,所述底盘(1)通过滑槽(10)与第二监控摄像头(9)转动连接,所述滑槽(10)截面形状为t形。
9.根据权利要求8所述的一种智慧工厂监控机器人,其特征在于:所述底盘(1)的顶部固定连接有空心电动旋转台(11),所述空心电动旋转台(11)的内径大于电动推杆(2)底部的外径,所述空心电动旋转台(11)的输出端固定连接有衔接杆(12),所述衔接杆(12)的端部与第二监控摄像头(9)的底部固定连接。
10.根据权利要求9所述的一种智慧工厂监控机器人,其特征在于:所述第一监控摄像头(4)为三百六十度全景摄像头,所述电动推杆(2)伸长状态的高度高于一点五米,所述电动推杆(2)主体部分的两侧均固定连接有路况标识识别装置(13),所述路淼标识识别装置(13)的识别摄像头朝向斜下方。
技术总结
本发明涉及工厂监控技术领域,特别是一种智慧工厂监控机器人,包括底盘,所述底盘顶部的中心处固定连接有电动推杆,所述电动推杆的顶部转动连接有电动转盘,所述电动转盘的顶部固定连接有第一监控摄像头,所述底盘的底部开设有四个收纳槽,所述收纳槽内均转动连接有电动转轴,所述电动转轴的底部固定连接有万向驱动轮,所述电动转轴的另一侧固定连接有吸盘,所述底盘底部的外侧转动连接有第二监控摄像头。本发明的优点在于:当需要将该监控机器人固定进行定点监控时,可以将吸盘转动至竖直状态与地面吸附提高底盘的稳定性,从而使监控机器人能够承受更大的冲击力,降低在工厂车间内定点监控时被磕碰翻倒造成损坏的情况。
技术研发人员:何丹,皇甫文君,何维霜
受保护的技术使用者:中知云控股有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!