机器人系统的控制方法及控制装置与流程
本发明涉及机器人系统的控制方法及控制装置。
背景技术:
1、例如,专利文献1中记载的机器人的跟踪控制方法包括如下所述的步骤:通过配置于输送机的正上方的照相机对输送机输送的工件进行连续拍摄,并基于其拍摄结果检测工件的位置及输送速度;以及根据工件的输送速度和机器人的动作时间而通过迭代计算估计跟踪动作的目标位置。
2、专利文献1:日本特开平10-105217号公报
3、但是,在专利文献1中,即便是机器人针对由输送机输送的工件开始了跟踪,之后,机器人也未必能够拾取工件并将拾取的工件输送至目标位置。特别是,在拾取后的输送路径已预先确定的情况下,如果开始拾取后的输送的实际位置相对于输送路径的起点产生偏离,则存在该偏离直接导致与目标位置的偏离的问题。
技术实现思路
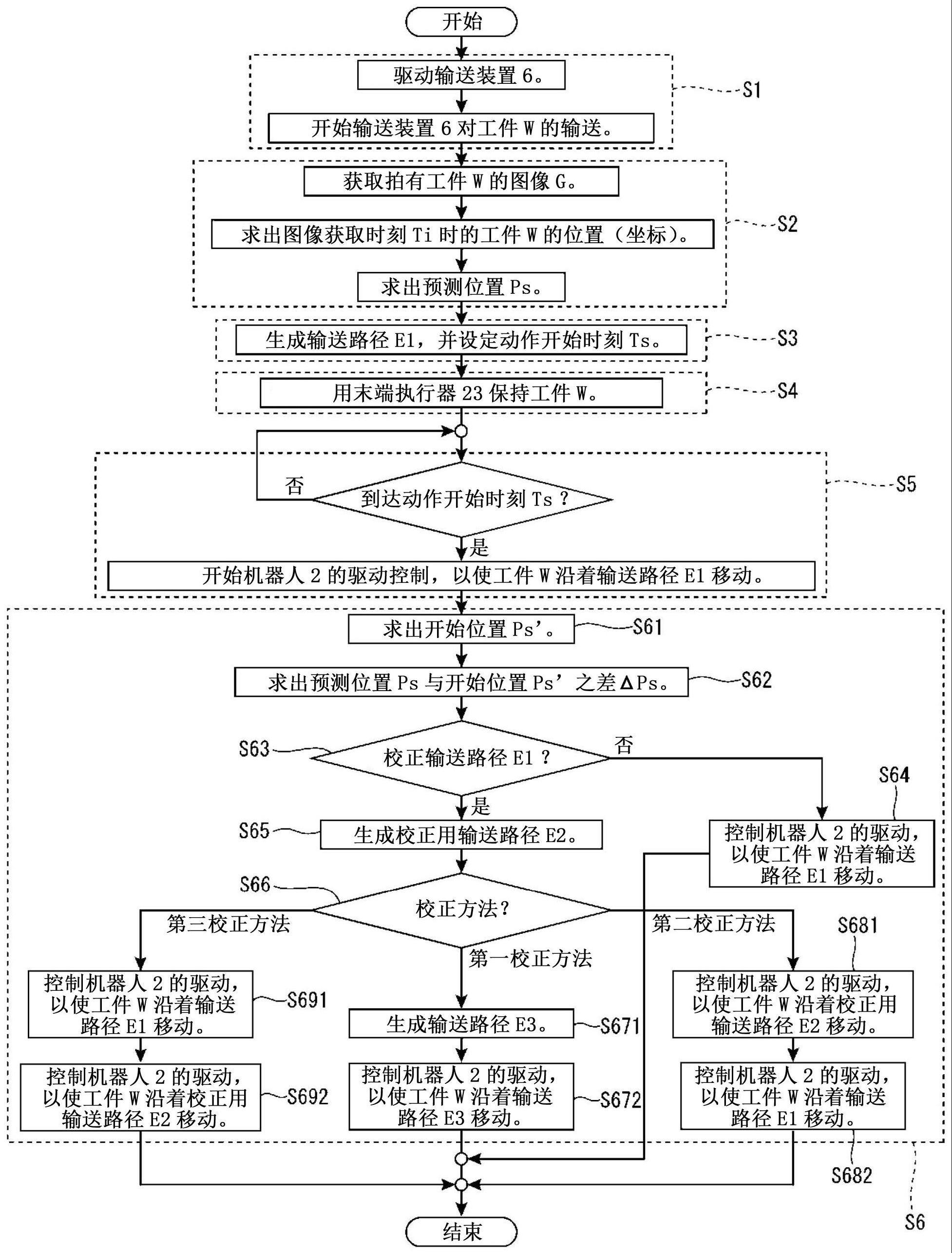
1、本发明的机器人系统的控制方法是保持由输送装置输送的对象物并将所保持的所述对象物输送至目标位置的机器人系统的控制方法,所述机器人系统的控制方法包括:输送开始位置预测步骤,求出开始向所述目标位置输送所述对象物的预测位置;输送路径生成步骤,生成从所述预测位置到所述目标位置的所述对象物的输送路径;输送开始步骤,开始将所保持的所述对象物输送至所述目标位置;以及校正步骤,利用开始所述输送的开始位置与所述预测位置之差对所述输送路径进行校正。
2、本发明的控制装置是机器人系统的控制装置,所述机器人系统保持由输送装置输送的对象物,并将所保持的所述对象物输送至目标位置,所述控制装置执行:输送开始位置预测步骤,求出开始向所述目标位置输送所述对象物的预测位置;输送路径生成步骤,生成从所述预测位置到所述目标位置的所述对象物的输送路径;输送开始步骤,开始将所保持的所述对象物输送至所述目标位置;以及校正步骤,利用开始所述输送的开始位置与所述预测位置之差对所述输送路径进行校正。
技术特征:
1.一种机器人系统的控制方法,其特征在于,所述机器人系统保持由输送装置输送的对象物,并将所保持的所述对象物输送至目标位置,所述机器人系统的控制方法包括:
2.根据权利要求1所述的机器人系统的控制方法,其特征在于,
3.根据权利要求1所述的机器人系统的控制方法,其特征在于,
4.根据权利要求3所述的机器人系统的控制方法,其特征在于,
5.根据权利要求3所述的机器人系统的控制方法,其特征在于,
6.根据权利要求3所述的机器人系统的控制方法,其特征在于,
7.根据权利要求1所述的机器人系统的控制方法,其特征在于,
8.一种控制装置,其特征在于,所述控制装置是机器人系统的控制装置,所述机器人系统保持由输送装置输送的对象物,并将所保持的所述对象物输送至目标位置,所述控制装置执行:
技术总结
本申请提供能够精度良好地进行对象物的输送的机器人系统的控制方法及控制装置。机器人系统的控制方法是保持由输送装置输送的对象物并将所保持的所述对象物输送至目标位置的机器人系统的控制方法,所述机器人系统的控制方法包括:输送开始位置预测步骤,求出开始向所述目标位置输送所述对象物的预测位置;输送路径生成步骤,生成从所述预测位置到所述目标位置的所述对象物的输送路径;输送开始步骤,开始将所保持的所述对象物输送至所述目标位置;以及校正步骤,利用开始所述输送的开始位置与所述预测位置之差对所述输送路径进行校正。
技术研发人员:岩佐康平
受保护的技术使用者:精工爱普生株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!