一种磁性微型机器人及其制备方法
本发明涉及微型机器人,尤其是涉及一种磁性微型机器人及其制备方法。
背景技术:
1、微型机器人指的是尺度在微纳米级别(几纳米至几百微米)的小型机器人,其在解决分子尺寸器件的组装和利用问题方面具有突出的优势,已经成为一个快速发展的跨学科领域。基于微型机器人尺寸小,可以进行三维控制运动的优点,微型机器人在医学方面的应用有体内微小目标识别、靶向载药、微创手术等。
2、由于微型机器人尺寸微小,其运动时处于雷诺系数很低的环境中,物体可看作在一个非常粘滞、微小以及缓慢的环境中运动,粘滞力占主导作用,惯性力则可忽略不计。在这种条件下,若想驱动微型机器人,必须源源不断地为其提供动力。其中,磁场驱动微型机器人由于所需磁场强度低,且低频率磁场能够穿透生物组织,对生物体无害,可操作性强,受到了越来越多科学家的关注,是一种非常有前景的微型机器人类型。
3、目前,对于磁性微型机器人的制备,主要通过溅射的方式在螺旋形机器人的表面沉积磁性材料,或者通过混合的方式直接制备磁性微型机器人。其中,溅射的方法附着在微型机器人表面的磁性粒子厚度仅可到达200nm左右,赋予微型机器人的磁场力较小,并且溅射的方法对仪器、靶材等要求比较高,难以大批量制备磁性微型机器人;而混合的方式受限于飞秒激光打印技术,难以保证磁性粒子的数量,此外,打印过程中,因磁性粒子的存在,极易导致微型机器人表面凹凸不平,并且因其表面光刻胶的暴露,微型机器人的粘度较大,进一步限制了其应用。
4、鉴于此,本发明提出了一种新型的磁性微型机器人的制备方法。
技术实现思路
1、本发明的目的在于提供一种磁性微型机器人及其制备方法,该方法所制备得到的磁性微型机器人在外磁场的控制下具有响应快、运动稳定等优点,为磁性微型机器人的运动控制提供了良好的前提条件。
2、本发明提供一种磁性微型机器人的制备方法,包括以下步骤:
3、将磁混光刻胶滴涂在打印好的微型机器人的表面,将其置于70-90℃的环境中静置3-8min,然后于常温下静置50-70min,经显影后,得到磁性微型机器人;其中,所述磁混光刻胶包括光刻胶和磁性粒子;所述微型机器人通过飞秒激光直写仪打印得到。
4、本发明通过双光子飞秒激光直写仪打印出来的微型机器人表面拥有较大的粘性,利用微型机器人表面的粘度属性以及壁面对微小粒子的吸附作用,可使得微型机器人附近的磁性粒子逐渐被壁面吸附。当磁混光刻胶滴涂在微型机器人的表面后,磁性粒子快速集中在微型机器人附近并开始附着,并逐渐趋于稳定,整个附着过程仅需1h左右,并且磁性粒子可稳定且均匀地附着在微型机器人的表面,而磁性粒子可稳定均匀附着在微型机器人人的表面,是磁性微型机器人在外磁场环境下稳定运动的关键所在。有效解决了溅射方法对仪器、靶材等要求比较高,难以大批量制备磁性微型机器人,以及混合打印技术导致微型机器人表面凹凸不平的问题,为磁控微型机器人的运动控制提供了良好的前提条件。
5、作为本技术方案优选地,为充分提高磁混光刻胶的均一性和稳定性,在磁混光刻胶制备时,首先,将光刻胶与磁性粒子混匀后,再加入挥发性有机溶剂进一步分散,最后置于漩涡混合仪中震荡处理5-10min。其中,本发明对于挥发性有机溶剂的种类不做严格限定,可以选择正己烷、乙醇等。
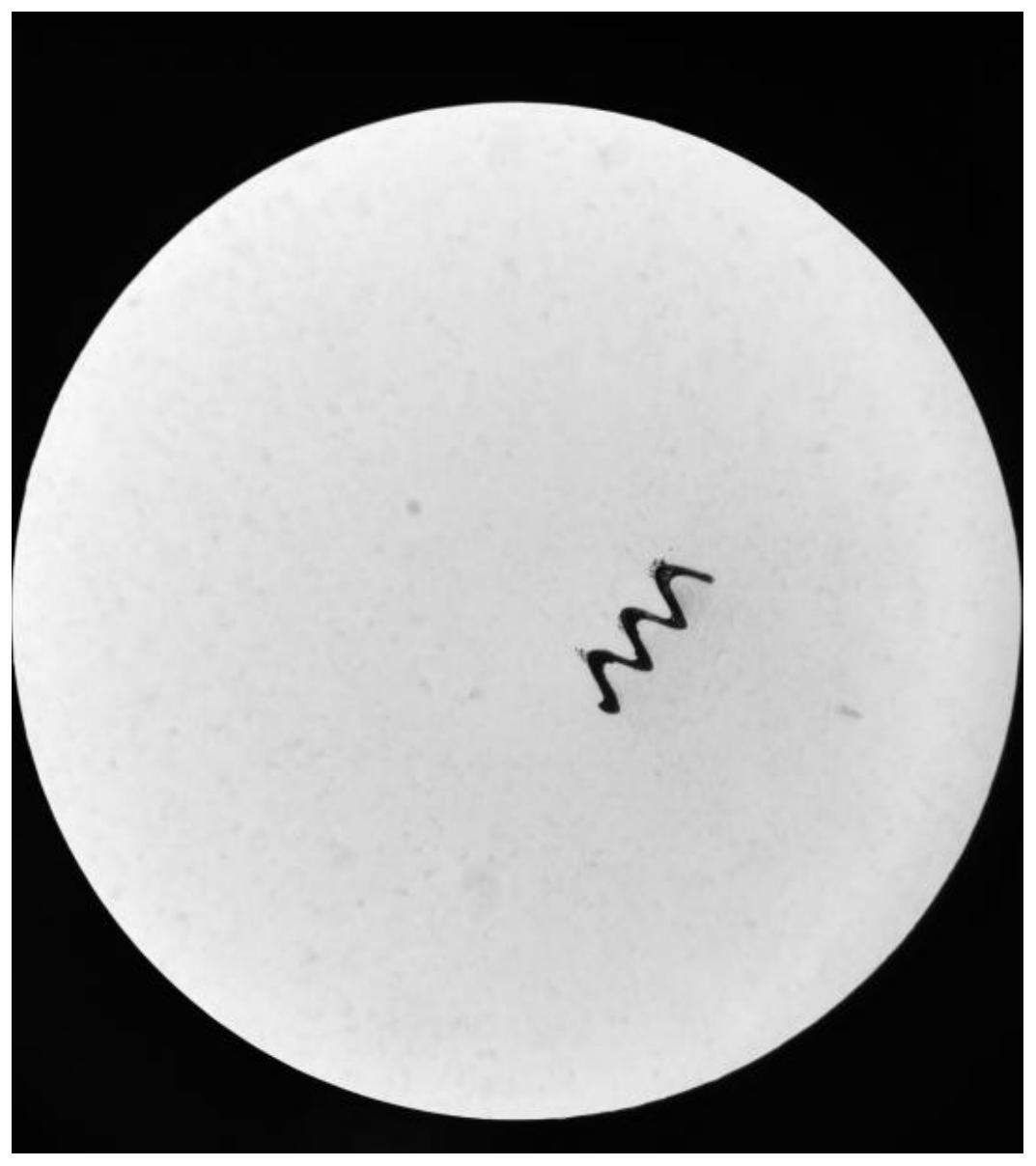
6、此外,为了增加附着面积和获得更好的螺旋运动结构,本发明的所述微型机器人优选为螺旋形微型机器人,在打印过程中将微型机器人的结构设计成螺旋片状。
7、作为本技术方案优选地,每1ml光刻胶所对应的磁性粒子的质量为2-6mg,保证磁性粒子均匀分散的同时,提高微型机器人表面的负载量。
8、作为本技术方案优选地,本发明所使用的磁性粒子包括四氧化三铁、镍、钴和钕铁硼中的任意一种或多种;而所述光刻胶为负性光刻胶,优选为nanoscribe公司研发的ip-s光刻胶。
9、作为本技术方案优选地,所述磁性粒子的粒径为40-60nm。
10、作为本技术方案优选地,包括以下步骤:
11、打印模型:将模型切片生成的打印文件录入双光子飞秒激光直写仪进行打印;
12、显影:打印完成后,将贴片取下,依次浸泡于pgmea溶液和异丙醇溶液中,最后取出自然风干,得到螺旋形微型机器人;
13、附着磁性粒子:将磁混光刻胶滴涂在螺旋形微型机器人的表面,将其置于70-90℃的环境中静置3-8min,然后于常温下静置50-70min,经显影后,得到磁性微型机器人。
14、在光刻过程中,将ip-s光刻胶涂覆在基片表面,并使用飞秒激光器在所需的位置局部聚合,形成所需的结构和图案;然后使用开发液去除未聚合的部分,留下聚合的结构和图案,在负性光刻胶中,未聚合的部分会被去除,而聚合的部分则被保留下来。然后,在制备好的微型机器人上滴一滴提前调配好的磁混光刻胶,将其置于70-90℃的环境中静置3-8min,然后于常温下静置50-70min,经显影后,即可得到磁性微型机器人。
15、其中,附着是的条件优选为:80℃的环境中静置5min,然后于常温下静置60min。
16、作为本技术方案优选地,所述模型的尺寸为100-1000μm。
17、作为本技术方案优选地,所述显影时,于pgmea溶液中浸泡10-30min,于异丙醇中浸泡2-10min。
18、第二方面,本发明还公开了上述制备方法所制备得到的一种磁性微型机器人,也理应属于本发明的保护范围。
19、本发明磁性微型机器人的制备方法,至少具有以下技术效果:
20、本发明通过双光子飞秒激光直写仪打印出来的微型机器人表面拥有较大的粘性,利用微型机器人表面的粘度属性以及壁面对微小粒子的吸附作用,可使得微型机器人附近的磁性粒子逐渐被壁面吸附;当磁混光刻胶滴涂在微型机器人的表面后,将其先在70-90℃的环境中放置3-8min,此时磁混光刻胶的粘度减小,流动性增大,磁性粒子快速集中在微型机器人附近并开始附着,然后放置在常温环境静置,可使附着效果逐渐稳定,整个附着过程仅需1h左右,并且磁性粒子可稳定且均匀地附着在微型机器人的表面。因此,本发明磁性微型机器人的制备方法具有制备成本低、加工时间短、磁场控制效果稳定、响应时间快等优点,具有广阔的应用前景。
技术特征:
1.一种磁性微型机器人的制备方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的制备方法,其特征在于,磁混光刻胶制备时,将光刻胶与磁性粒子混匀后,加入挥发性有机溶剂,并于漩涡混合仪中震荡处理5-10min。
3.根据权利要求1所述的制备方法,其特征在于,所述微型机器人为螺旋形微型机器人。
4.根据权利要求1所述的制备方法,其特征在于,每1ml光刻胶所对应的磁性粒子的质量为2-6mg。
5.根据权利要求1所述的制备方法,其特征在于,所述磁性粒子包括四氧化三铁、镍、钴和钕铁硼中的任意一种或多种;
6.根据权利要求1所述的制备方法,其特征在于,所述磁性粒子的粒径为40-60nm。
7.根据权利要求1所述的制备方法,其特征在于,包括以下步骤:
8.根据权利要求7所述的制备方法,其特征在于,所述模型的尺寸为100-1000μm。
9.根据权利要求7所述的制备方法,其特征在于,所述显影时,于pgmea溶液中浸泡10-30min,于异丙醇中浸泡2-10min。
10.一种磁性微型机器人,其特征在于,根据权利要求1-9任一项所述的制备方法制得。
技术总结
本发明涉及微型机器人技术领域,尤其是涉及一种磁性微型机器人及其制备方法,包括以下步骤:将磁混光刻胶滴涂在打印好的微型机器人的表面,将其置于70‑90℃的环境中静置3‑8min,然后于常温下静置50‑70min,经显影后,得到磁性微型机器人;其中,所述磁混光刻胶包括光刻胶和磁性粒子,所述微型机器人通过飞秒激光直写仪打印得到。本发明磁性微型机器人的制备方法具有制备成本低、加工时间短、磁场控制效果稳定、响应时间快等优点,具有广阔的应用前景。
技术研发人员:常家庆,徐榕长,沈腾,宋乔临,崔金生
受保护的技术使用者:广州大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!