一种双重视觉引导的轮式无轨柔性焊接机器人及控制方法与流程
本发明属于机器人焊接,尤其涉及一种双重视觉引导的轮式无轨柔性焊接机器人及控制方法。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、在钢结构建筑、设施的建造中,常采用模块化结构。焊接是大型钢结构建造的核心工作之一,在一个结构模块中往往存在大量狭小空间、长直(或大弯曲半径)焊缝的焊接任务,人工焊接不仅劳动强度高、焊接水平不稳定,还需搭建脚手架,防护网等辅助设施,施工效率低,高质量自动焊接成为核电设备生产的迫切需求。
3、目前存在多种市售长焊缝自动焊接装置,轨道式焊接小车具有定位准确,装夹后变形小,焊车行走平稳的特点,但其轨道安装要求较高,往往安装轨道的时间比焊接时间还要长,焊接生产效率低、智能性、适应性不足。
4、近年来一些科研院所研究开发了履带式的无轨导全位置爬行焊接机器人,吸附力大、负重能力强是履带结构的主要优点,但履带结构较为复杂,使得爬壁机器人过于笨重,转弯力矩过大,灵活性不足。
5、通过上述分析可见:履带式爬壁焊接机器人存在结构复杂、灵活性不足的问题,轨道式焊接机器人存在智能性不足,焊接生产效率低的问题。
技术实现思路
1、为克服上述现有技术的不足,本发明提供了一种双重视觉引导的轮式无轨柔性焊接机器人,采用视觉导航的方式引导焊接机器人本体沿焊缝移动,提高焊接机器人的容错能力和智能化水平。
2、为实现上述目的,本发明的一个或多个实施例提供了如下技术方案:
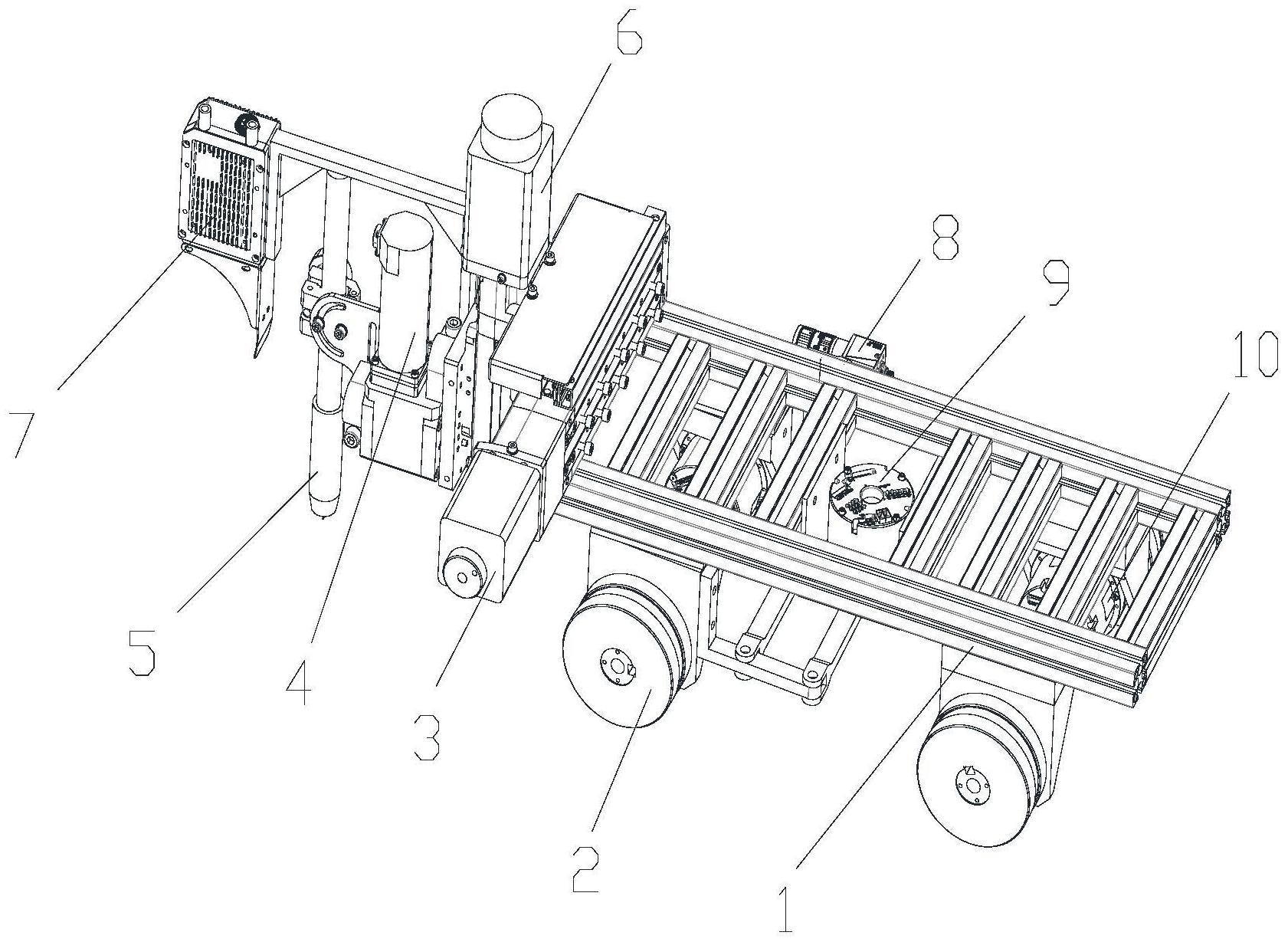
3、第一方面,公开了一种双重视觉引导的轮式无轨柔性焊接机器人,包括:焊接机器人本体、磁轮、追光相机、焊缝跟踪传感器;
4、所述磁轮设置在所述焊接机器人本体的下方,所述追光相机设置在所述焊接机器人本体上,所述焊缝跟踪传感器设置在所述焊接机器人本体的前方;
5、所述磁轮用于吸附在铁磁性工件表面,对所述铁磁性工件施加正压力从而产生摩擦力,以驱动焊接机器人运动;
6、所述追光相机实时采集导航光信号的图像并传输至控制器,所述控制器通过光信号在图像中的位置与预设位置坐标的偏差,控制焊接机器人本体上的驱动电机以进行轨迹纠偏,使得所述焊接机器人本体沿焊缝移动;
7、所述焊缝跟踪传感器实时反馈焊接信息至控制器,所述控制器控制焊枪的摆动中心点根据焊缝跟踪传感器反馈信息实时微调。
8、作为进一步的技术方案,所述磁轮至少为四个,分别前轮及后轮,采用独立控制的磁轮驱动电机驱动对应的磁轮,后轮为焊接机器人运动提供驱动力,前轮兼具导向功能和驱动功能。
9、作为进一步的技术方案,所述前轮分别连接至对应的转向机构,所述转向机构包括磁轮驱动电机、电机安装座、转向连杆及偏心轴;
10、所述磁轮驱动电机固定在所述电机安装座上,所述磁轮驱动电机通过所述转向连杆连接至所述偏心轴;
11、通过所述磁轮驱动电机带动所述偏心轴旋转,使焊接机器人不同的前轮在直行和转向过程中始终保持平行。
12、作为进一步的技术方案,所述磁轮通过磁轮驱动轴与磁轮驱动电机连接为一体;所述磁轮设置在导向轮安装座内。
13、作为进一步的技术方案,所述电机安装座的两端各设有一个限位销孔,所述磁轮驱动电机安装至所述电机安装座到位后,两限位销孔内各打入一支限位轴销,穿过限位销孔,插入导向轮安装座的伸出轴的限位槽内。
14、作为进一步的技术方案,所述导向轮安装座的伸出轴与滚动轴承的内孔保持相对固定,所述滚动轴承的外圈保持相对固定。
15、第二方面,公开了一种双重视觉引导的轮式无轨柔性焊接机器人的控制方法,包括:
16、实时采集导航光信号的图像;
17、通过光信号在图像中的位置与预设位置坐标的偏差,控制焊接机器人以进行轨迹纠偏,使得所述焊接机器人本体沿焊缝移动;
18、实时反馈焊接信息,控制焊枪的摆动中心点根据反馈信息实时微调。
19、作为进一步的技术方案,所述方法用于对焊接平板长直焊缝焊接,包括:
20、将机器人本体吸附在焊缝的起始一端,安装在焊接机器人本体上的焊枪摆动器通过夹具将焊枪固定,使焊枪按照设定的摆动方式进行摆动焊接;
21、激光投射光源安装在焊缝的另一端,使激光投射光源的出光方向平行于焊缝,在焊接机器人本体上安装一台追光相机,采集上述激光投射光源射出的激光光斑;
22、设置一个容许偏差范围,激光光斑经提取中心点后,若处于容许偏差范围之内,则焊枪的摆动中心点根据焊缝跟踪传感器反馈信息实时微调,转向驱动电机使导向轮保持现有方向运行,焊接机器人运行方向无须修正;
23、若光斑经提取中心点后处于容许偏差范围之外,则判定焊接机器人运行方向发生偏差,转向驱动电机调整导向轮方向使追光相机采集的激光斑点中心处于容许偏差范围之内,对焊接机器人运行轨迹进行纠偏。
24、作为进一步的技术方案,所述方法用于对立式圆形储罐环焊缝焊接,包括:
25、投射激光器调制出与环焊缝相平行的激光条纹,投射到带焊接圆柱面上,在焊缝旁形成一条激光投射条纹;
26、追光相机垂直于圆柱面,用于采集投射在圆柱面上的激光条纹;
27、计算激光投射条纹与理想条纹之间的偏离因子δ,并为δ设定合理的阈值范围θ;
28、若δ处于θ范围之内,则焊枪的摆动中心点根据焊缝跟踪传感器反馈信息实时微调,转向驱动电机使导向轮保持现有方向运行,焊接机器人运行方向无须修正;
29、若激光条纹经提取中心点后δ处于θ范围之外,则判定焊接机器人运行方向发生偏差,转向驱动电机调整导向轮方向使追光相机采集的激光条纹的偏离因子δ处于θ之内,对焊接机器人运行轨迹进行纠偏。
30、作为进一步的技术方案,偏离因子δ的计算过程为:
31、δ=sδabc+sδcde,当δ<θ时,判定焊接机器人未偏离轨迹,当δ>θ时,判定焊接机器人偏离轨迹;
32、若激光投影条纹与理想条纹无交点,则直接判定δ趋于∞,即δ>θ。
33、以上一个或多个技术方案存在以下有益效果:
34、本发明技术方案采用四轮式结构设计,通过独立驱动的磁轮配合转向连杆,实现焊接机器人的行进和轨迹调整。机器人四个车轮均采用耐高温(180℃)钕铁硼磁铁制成,在保证吸附力的前提下,减小了焊接机器人与焊接工件之间的接触面积,从而减小机器人运动的摩擦力,提高焊接机器人轨迹调整的灵活性。
35、本发明技术方案采用视觉导航的方式引导焊接机器人本体沿焊缝移动。工业实时采集导航光信号的图像,并通过光信号在图像中的位置与预设位置坐标的偏差,自动控制机器人本体的驱动电机进行位姿调整,提高焊接机器人的容错能力和智能化水平。
36、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种双重视觉引导的轮式无轨柔性焊接机器人,其特征是,包括:焊接机器人本体、磁轮、追光相机、焊缝跟踪传感器;
2.如权利要求1所述的一种双重视觉引导的轮式无轨柔性焊接机器人,其特征是,所述磁轮至少为四个,分别前轮及后轮,采用独立控制的磁轮驱动电机驱动对应的磁轮,后轮为焊接机器人运动提供驱动力,前轮兼具导向功能和驱动功能。
3.如权利要求2所述的一种双重视觉引导的轮式无轨柔性焊接机器人,其特征是,所述前轮分别连接至对应的转向机构,所述转向机构包括磁轮驱动电机、电机安装座、转向连杆及偏心轴;
4.如权利要求3所述的一种双重视觉引导的轮式无轨柔性焊接机器人,其特征是,所述磁轮通过磁轮驱动轴与磁轮驱动电机连接为一体;所述磁轮设置在导向轮安装座内。
5.如权利要求3所述的一种双重视觉引导的轮式无轨柔性焊接机器人,其特征是,所述电机安装座的两端各设有一个限位销孔,所述磁轮驱动电机安装至所述电机安装座到位后,两限位销孔内各打入一支限位轴销,穿过限位销孔,插入导向轮安装座的伸出轴的限位槽内。
6.如权利要求5所述的一种双重视觉引导的轮式无轨柔性焊接机器人,其特征是,所述导向轮安装座的伸出轴与滚动轴承的内孔保持相对固定,所述滚动轴承的外圈保持相对固定。
7.基于权利要求1-6任一所述的一种双重视觉引导的轮式无轨柔性焊接机器人的控制方法,其特征是,包括:
8.基于权利要求7所述的一种双重视觉引导的轮式无轨柔性焊接机器人的控制方法,其特征是,所述方法用于对焊接平板长直焊缝焊接,包括:
9.基于权利要求6所述的一种双重视觉引导的轮式无轨柔性焊接机器人的控制方法,其特征是,所述方法用于对立式圆形储罐环焊缝焊接,包括:
10.基于权利要求6所述的一种双重视觉引导的轮式无轨柔性焊接机器人的控制方法,其特征是,偏离因子δ的计算过程为:
技术总结
本发明提出了一种双重视觉引导的轮式无轨柔性焊接机器人及控制方法,包括:焊接机器人本体、磁轮、追光相机、焊缝跟踪传感器;所述磁轮设置在所述焊接机器人本体的下方,追光相机设置在所述焊接机器人本体上,所述焊缝跟踪传感器设置在所述焊接机器人本体的前方;追光相机实时采集导航光信号的图像并传输至控制器,所述控制器通过光信号在图像中的位置与预设位置坐标的偏差,控制焊接机器人本体上的驱动电机以进行轨迹纠偏,使得所述焊接机器人本体沿焊缝移动;焊缝跟踪传感器实时反馈焊接信息至控制器,所述控制器控制焊枪的摆动中心点根据焊缝跟踪传感器反馈信息实时微调。
技术研发人员:刘伟,孟超,姜爱宁,李世波,聂炯,修延飞,张华建,李宗泽,任泽良
受保护的技术使用者:山东核电设备制造有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!