一种煤矿用管道安装机器人及其工作方法与流程
本发明涉及煤矿井下巷道及金属矿山巷道管道安装施工领域,具体涉及一种煤矿用管道安装机器人及其工作方法。
背景技术:
1、为满足煤矿井下煤炭开采的需要,井下巷道中布置有多种功能的管道,如:给排水管、通风管、瓦斯抽采管等,担负着撒水分防尘、工业排水、煤层注浆、通风、瓦斯抽采等功能。传统的管道安装方式主要为人工搬运,手拉葫芦起吊,临时搭建操作平台的方式。具体安装方法如下:1在安装点搭建登高作业平台。2利用无轨胶轮车或有轨矿车将管道运输至安装点附近。3将管道经过简单捆绑后,使用手拉葫芦起吊管道。4调整管道,连接对接法兰进行固定。整个安装过程费时费力,特别是大直径、单管重量大的管道,安装施工难度大,安全隐患多,施工效率低。
技术实现思路
1、本发明的目的在于提供一种煤矿用管道安装机器人及其工作方法,解决了目前依赖吊装方式安装管道存在的施工难度大,安全隐患多,施工效率低的问题。
2、本发明是通过以下技术方案来实现:
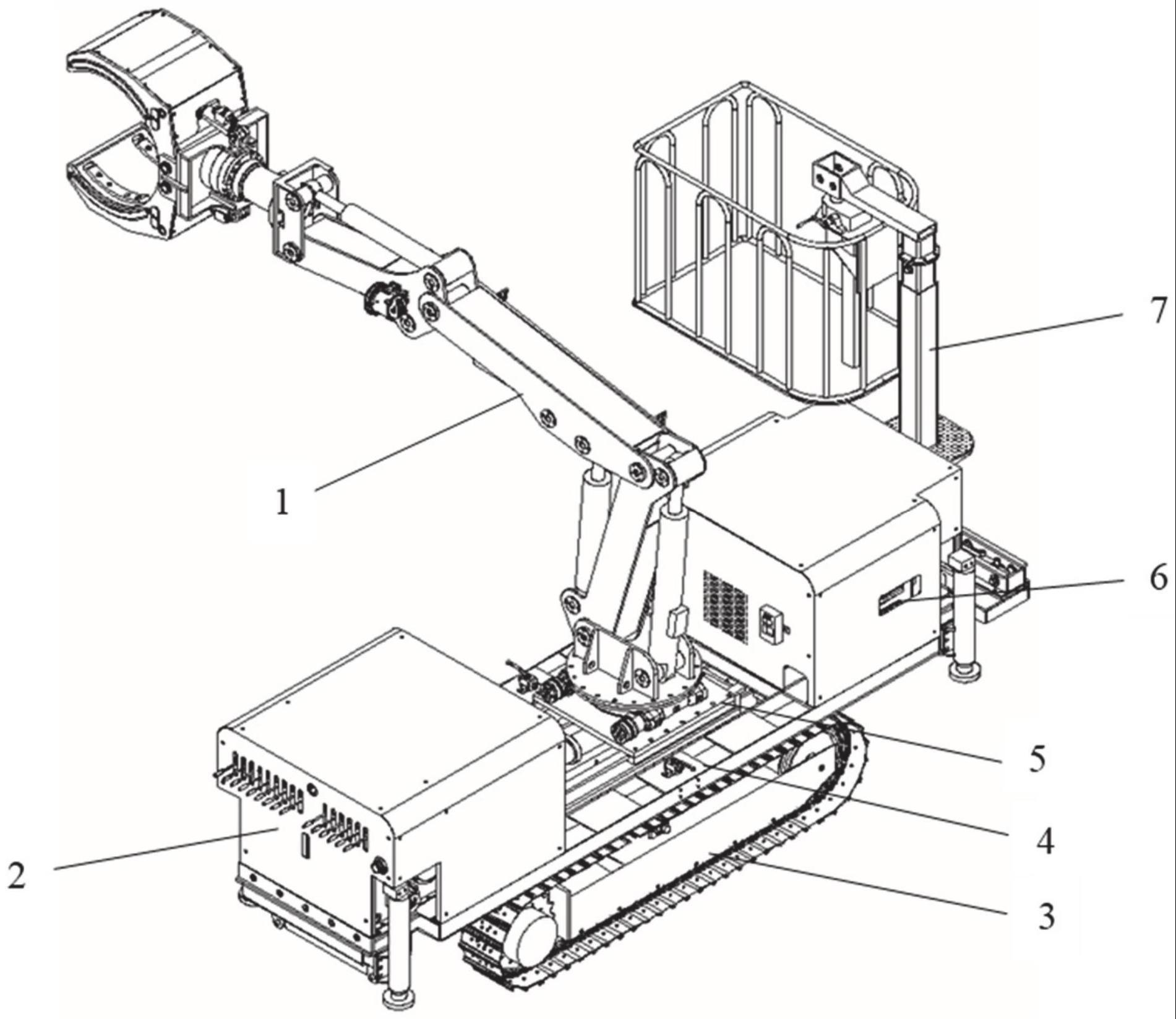
3、一种煤矿用管道安装机器人,包括机械臂、履带行走机构、安装平台和操作平台;
4、安装平台设置在履带行走机构上方,机械臂底部设有回转台,回转台下方设有第一滑移机构,第一滑移机构设置在安装平台上;
5、操作平台连接在安装平台上;
6、在机械臂末端连接有夹持爪,夹持爪由两个对称的夹持件连接而成,夹持件内表面为圆弧面,形成用于夹持待安装管道的弧槽;
7、夹持爪的连接端通过柔性头和螺旋式摆动油缸与机械臂末端连接;
8、操作平台包括吊篮,及与吊篮连接的升降机构和第二滑移机构。
9、进一步,第一滑移机构包括第一滑移油缸、第一轨道和第一滑块,第一轨道和第一滑块形成轨道滑块机构,第一轨道固定在安装平台上,第一滑块固定在回转台下方,第一滑移油缸与第一滑块连接,当需要将机械臂在水平方向移动时,第一滑移油缸带动第一滑块在第一轨道上滑动。
10、进一步,第二滑移机构包括第二滑移油缸、第二轨道和第二滑块,第二轨道与第一轨道的铺设方向互相垂直;
11、第二轨道和第二滑块形成轨道滑块机构,第二轨道固定在安装平台上,第二滑块固定在回转台下方,第二滑移油缸与第二滑块连接,当需要将操作平台在水平方向移动时,第二滑移油缸带动第二滑块在第二轨道上滑动。
12、进一步,升降机构包括升降油缸和固定件,升降油缸的底部固定在第二滑移机构上,顶部通过固定件与吊篮固定连接。
13、进一步,机械臂包括由下至上依次铰接的第一臂、第二臂及第三臂,第一臂的末端与回转台之间连接有一级油缸,第二臂的末端与回转台之间连接有二级油缸,第二臂和第三臂之间连接有三级油缸;
14、螺旋式摆动油缸与机械臂的末端通过连接件连接,连接件与第三臂末端铰接,连接件与第三臂的起始端连接有四级油缸。
15、进一步,柔性头包括依次连接的第一连接板、限位板、压盖和第二连接板,在第二连接板和压盖内开有弧形腔体,弧形腔体共同形成用于容纳球形铰接头的空间,夹持爪的连接端安装在球形铰接头内,第一连接板与螺旋式摆动油缸通过螺栓相连。
16、进一步,操作平台配置有手摇式回转机构,用于实现吊篮绕手摇把中心回转调节。
17、进一步,夹持爪包括两个对称设置的夹持壳体,两夹持壳体通过销轴铰接在连接板上,在每个夹持壳体的闭口侧均连接有夹紧油缸;
18、在每个夹持壳体上还设有自旋转油缸、滑动轨道和滑块,将管道夹紧后,通过自旋转油缸伸出作用,推动滑块在滑动轨道内滑动,实现管道围绕圆心位置的原地自旋转功能。
19、进一步,在安装平台下方设有四个伸缩支撑机构,分别位于安装平台的四角位置;
20、伸缩支撑机构末端连接有支撑油缸,支撑油缸水平设置,用于带动伸缩支撑机构沿宽度方向向外伸出。
21、本发明公开了所述煤矿用管道安装机器人的工作方法,包括以下过程:
22、将管道安装机器人行驶至巷道指定位置后,伸出伸缩支撑机构,稳定机身;
23、通过夹持爪夹紧管道,机械臂将管道举升至巷道顶部,然后通过螺旋式摆动油缸和柔性头及夹持爪调整管道的位姿,对准连接法兰上的螺栓孔;
24、施工人员站在吊篮内,通过升降机构和第二滑移机构调节吊篮的位置,将施工人员移动至安装位置处,进行连接法兰上的对接螺栓的紧固工作。
25、与现有技术相比,本发明具有以下有益的技术效果:
26、本发明公开了一种煤矿用管道安装机器人,针对煤矿井下巷道有限的作业空间及管道布置特点,设计了一种管道抓取、举升、安装机器人,具体包括机械臂、履带行走机构、安装平台和操作平台;在机械臂末端连接有夹持待安装管道的夹持爪,夹持爪的连接端通过柔性头和螺旋式摆动油缸与机械臂末端连接;通过机械臂将管道举升至巷道顶部,然后通过螺旋式摆动油缸的轴向旋转功能和柔性头铰接球体结构的转动功能及夹持爪自旋转功能调整管道的位姿,通过升降机构和第二滑移机构调节吊篮的位置,将施工人员移动至安装位置处。与现有煤矿井下的人工搬运,手拉葫芦起吊,临时搭建操作平台的施工方法相比,本发明能够解决巷道管道安装过程中工人劳动强度大,生产效率低,安全隐患多等普遍存在的问题。
27、本发明整机设计合理,可以在煤矿巷道有限空间内实现管道的自动抓取举升,大大降低巷道管道安装过程中工人的劳动强度,提高施工效率,降低安全隐患。
28、进一步,柔性头包括依次连接的第一连接板、限位板、压盖、第二连接板,在第二连接板和压盖内开有弧形腔体,弧形腔体共同形成用于容纳球形铰接头的空间,夹持爪的连接端安装在球形铰接头内,实现在液压操作阀组不动作的情况下,夹持爪在外力摇晃下,第二连接板与限位板围绕球形铰接头圆弧形面转动,转动范围受第一连接板与限位板之间活动缝隙大小影响。当活动缝隙距离变为0时,第一连接板与限位板接触,实现阻挡继续转动的目的。随即实现有限范围内人为干预调节位置的目的,制约范围受限位板与第一连接板之间的缝隙影响。
29、进一步,夹持爪包括两个对称设置的夹持壳体,两夹持壳体与后端连接板通过销轴铰接,在每个夹持壳体的闭口侧均连接有夹紧油缸,可以通过操作阀组控制,两个夹持壳体通过夹紧油缸伸出作用,夹持壳体围绕销轴转动,上下两个夹持壳体同时作用,将管道夹紧。在每个夹持壳体上还设有自旋转油缸、滑动轨道和滑块,将管道夹紧后,通过自旋转油缸伸出作用,推动滑块在滑动轨道内滑动,实现管道围绕圆心位置的原地自旋转功能。
30、进一步,安装平台周围水平方向连接有4个支撑油缸,支撑油缸可以在整机宽度方向沿轨道自动伸出;在安装平台下方设有四个伸缩支撑机构,沿高度方向自动上下支撑。支撑油缸与伸缩支撑机构连接,两者协同配合,增加整机的支撑面积,提高整机的稳定性,防止工作时整机倾覆。
技术特征:
1.一种煤矿用管道安装机器人,其特征在于,包括机械臂(1)、履带行走机构(3)、安装平台(4)和操作平台(7);
2.根据权利要求1所述的一种煤矿用管道安装机器人,其特征在于,第一滑移机构(5)包括第一滑移油缸、第一轨道和第一滑块,第一轨道和第一滑块形成轨道滑块机构,第一轨道固定在安装平台(4)上,第一滑块固定在回转台(8)下方,第一滑移油缸与第一滑块连接,当需要将机械臂(1)在水平方向移动时,第一滑移油缸带动第一滑块在第一轨道上滑动。
3.根据权利要求1所述的一种煤矿用管道安装机器人,其特征在于,第二滑移机构(5)包括第二滑移油缸(16)、第二轨道(17)和第二滑块,第二轨道(17)与第一轨道的铺设方向互相垂直;
4.根据权利要求1所述的一种煤矿用管道安装机器人,其特征在于,升降机构包括升降油缸(15)和固定件,升降油缸(15)的底部固定在第二滑移机构(5)上,顶部通过固定件与吊篮(14)固定连接。
5.根据权利要求1所述的一种煤矿用管道安装机器人,其特征在于,机械臂(1)包括由下至上依次铰接的第一臂(9)、第二臂及第三臂,第一臂(9)的末端与回转台(8)之间连接有一级油缸(23),第二臂的末端与回转台(8)之间连接有二级油缸(24),第二臂和第三臂之间连接有三级油缸(25);
6.根据权利要求1所述的一种煤矿用管道安装机器人,其特征在于,柔性头(12)包括依次连接的第一连接板(31)、限位板(30)、压盖(33)和第二连接板(32),在第二连接板(32)和压盖(33)内开有弧形腔体,弧形腔体共同形成用于容纳球形铰接头(29)的空间,夹持爪(13)的连接端安装在球形铰接头(29)内,第一连接板(31)与螺旋式摆动油缸(11)通过螺栓相连。
7.根据权利要求1所述的一种煤矿用管道安装机器人,其特征在于,操作平台(7)配置有手摇式回转机构(18),用于实现吊篮(14)绕手摇把中心回转调节。
8.根据权利要求1所述的一种煤矿用管道安装机器人,其特征在于,夹持爪(13)包括两个对称设置的夹持壳体(38),两夹持壳体(38)通过销轴(35)铰接在连接板上,在每个夹持壳体(38)的闭口侧均连接有夹紧油缸(36);
9.根据权利要求1所述的一种煤矿用管道安装机器人,其特征在于,在安装平台(4)下方设有四个伸缩支撑机构(22),分别位于安装平台(4)的四角位置;
10.基于权利要求1-9所述煤矿用管道安装机器人的工作方法,其特征在于,包括以下过程:
技术总结
本发明涉及煤矿井下巷道及金属矿山巷道管道安装施工领域,涉及一种煤矿用管道安装机器人,包括机械臂、履带行走机构、安装平台和操作平台;安装平台设置在履带行走机构上方,机械臂底部设有回转台,回转台下方设有第一滑移机构,第一滑移机构设置在安装平台上;操作平台连接在安装平台上;在机械臂末端连接有夹持爪,夹持爪由两个对称的夹持件连接而成,夹持件形成用于夹持待安装管道的弧槽;夹持爪的连接端通过柔性头和螺旋式摆动油缸与机械臂末端连接;操作平台包括吊篮,及与吊篮连接的升降机构和第二滑移机构。本发明可以在煤矿巷道有限空间内实现管道的自动抓取举升,大大降低巷道管道安装过程中工人的劳动强度,提高施工效率。
技术研发人员:曹红旭,李彬,张元振,白哲,申晓龙
受保护的技术使用者:渭南陕煤启辰科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!