一种机器人任务校验方法、装置、电子设备和介质与流程
本公开涉及机器人控制,尤其涉及一种机器人任务校验方法、装置、电子设备和介质。
背景技术:
1、目前,使用机器人执行各类任务成为一种发展趋势,机器人在执行任务时,当电量较低时就需要充电,给机器人提供充电服务的装置叫做充电桩,机器人充电时,由工作人员将其推送至充电桩上,在此过程中,难免会出现推送错充电桩的事故发生,当机器人被推送错充电桩后,其任务却还是之前的设置,就会造成机器人迷路,甚至损坏,因此解决当机器人被推送错充电桩后的任务校验问题,成为了该行业的研究重点。
技术实现思路
1、本公开提供一种机器人任务校验方法、装置、电子设备和介质,包括:当机器人被推送至充电桩后,与机器人进行通信,获取机器人当前位置信息;根据当前位置信息与预设位置信息,判断机器人是否被推送错充电桩:若当前位置信息与预设位置信息相同,则机器人未被推送错充电桩;若当前位置信息与预设位置信息不同,则机器人被推送错充电桩,将当前位置的任务下发至机器人,以便机器人执行正确的任务,相比于现有技术,本公开在机器人被推送错充电桩后,将当前位置的任务下发至机器人,此时机器人就可执行正确的任务,解决了机器人被推送错充电桩迷路的问题;避免了机器人因执行错误任务而损坏。
2、为达到上述目的,本公开采用如下技术方案:
3、本公开第一方面提供一种机器人任务校验方法,包括:
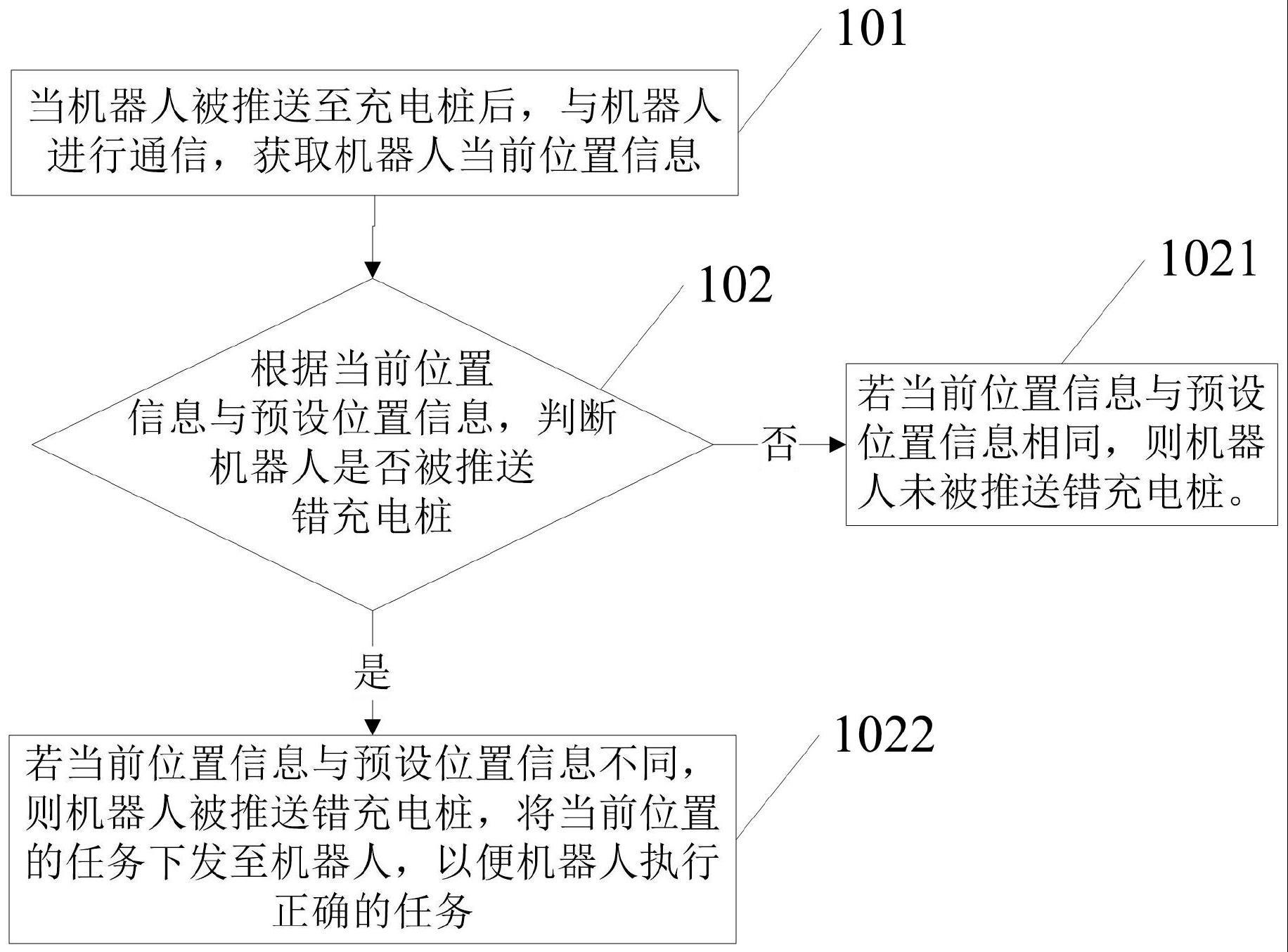
4、当机器人被推送至充电桩后,与所述机器人进行通信,获取所述机器人当前位置信息。
5、根据所述当前位置信息与预设位置信息,判断所述机器人是否被推送错充电桩:
6、若所述当前位置信息与预设位置信息相同,则所述机器人未被推送错充电桩。
7、若所述当前位置信息与预设位置信息不同,则所述机器人被推送错充电桩,将所述当前位置的任务下发至所述机器人,以便所述机器人执行正确的任务。
8、进一步的,所述的机器人任务校验方法,在根据所述当前位置信息与预设位置信息,判断所述机器人是否被推送错充电桩之后,还包括:
9、当所述机器人充电结束下桩后,对所述机器人的任务进行再次校验。
10、进一步的,所述的机器人任务校验方法,当所述机器人充电结束下桩后,对所述机器人的任务进行再次校验,包括:
11、获取所述机器人当前任务信息。
12、查询预设任务表,并判断所述当前任务与预设任务是否相同:
13、若所述当前任务与所述预设任务相同,则所述机器人继续执行所述当前任务。
14、若所述当前任务与所述预设任务不同,则将所述预设任务下发到所述机器人。
15、进一步的,所述的机器人任务校验方法,在根据所述当前位置信息与预设位置信息,判断所述机器人是否被推送错充电桩之后,还包括:
16、在所述机器人配备时,将所述机器人与所述充电桩进行一对一配对,以便充电时进行握手识别。
17、本公开第二方面提供一种机器人任务校验装置,包括:
18、通信单元,用于当机器人被推送至充电桩后,与所述机器人进行通信,获取所述机器人当前位置信息。
19、判断单元,用于根据所述当前位置信息与预设位置信息,判断所述机器人是否被推送错充电桩:
20、若所述当前位置信息与预设位置信息相同,则所述机器人未被推送错充电桩。
21、若所述当前位置信息与预设位置信息不同,则所述机器人被推送错充电桩,将所述当前位置的任务下发至所述机器人,以便所述机器人执行正确的任务。
22、进一步的,所述的机器人任务校验装置,还包括:
23、再次校验单元,用于当所述机器人充电结束下桩后,对所述机器人的任务进行再次校验。
24、进一步的,所述的机器人任务校验装置,再次校验单元包括:
25、获取模块,用于获取所述机器人当前任务信息。
26、判断模块,用于查询预设任务表,并判断所述当前任务与预设任务是否相同:
27、若所述当前任务与所述预设任务相同,则所述机器人继续执行所述当前任务。
28、若所述当前任务与所述预设任务不同,则将所述预设任务下发到所述机器人。
29、进一步的,所述的机器人任务校验方法,还包括:
30、配对单元,用于在所述机器人配备时,将所述机器人与所述充电桩进行一对一配对,以便充电时进行握手识别。
31、本公开第三方面提供一种电子设备,包括存储器、处理器以及存储在所述存储器中并且可以在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述方法的步骤。
32、本公开第四方面提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述方法的步骤。
33、本公开提供一种机器人任务校验方法、装置、电子设备和介质,包括:当机器人被推送至充电桩后,与机器人进行通信,获取机器人当前位置信息;根据当前位置信息与预设位置信息,判断机器人是否被推送错充电桩:若当前位置信息与预设位置信息相同,则机器人未被推送错充电桩;若当前位置信息与预设位置信息不同,则机器人被推送错充电桩,将当前位置的任务下发至机器人,以便机器人执行正确的任务,相比于现有技术,本公开在机器人被推送错充电桩后,将当前位置的任务下发至机器人,此时机器人就可执行正确的任务,解决了机器人被推送错充电桩迷路的问题;避免了机器人因执行错误任务而损坏。
34、与此同时,本公开在机器人充电结束下桩后,对机器人的任务进行了再次校验,包括:获取机器人当前任务信息;查询预设任务表,并判断当前任务与预设任务是否相同:若当前任务与预设任务相同,则机器人继续执行当前任务。若当前任务与预设任务不同,则将预设任务下发到机器人,进一步保障了机器人任务的正确性。
35、最后,本公开在机器人配备时,将机器人与充电桩进行一对一配对,以便充电时进行握手识别,解决了推送错充电桩的难题。
技术特征:
1.一种机器人任务校验方法,其特征在于,包括:
2.根据权利要求1所述的机器人任务校验方法,其特征在于,在根据所述当前位置信息与预设位置信息,判断所述机器人是否被推送错充电桩之后,还包括:
3.根据权利要求2所述的机器人任务校验方法,其特征在于,当所述机器人充电结束下桩后,对所述机器人的任务进行再次校验,包括:
4.根据权利要求1所述的机器人任务校验方法,其特征在于,在根据所述当前位置信息与预设位置信息,判断所述机器人是否被推送错充电桩之后,还包括:
5.一种机器人任务校验装置,其特征在于,包括:
6.根据权利要求5所述的机器人任务校验装置,其特征在于,还包括:
7.根据权利要求6所述的机器人任务校验装置,其特征在于,再次校验单元包括:
8.根据权利要求5所述的机器人任务校验方法,其特征在于,还包括:
9.一种电子设备,包括存储器、处理器以及存储在所述存储器中并且可以在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至4中任一项所述方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至4中任一项所述方法的步骤。
技术总结
本公开涉及机器人控制技术领域,提供了一种机器人任务校验方法、装置、电子设备和介质。包括:当机器人被推送至充电桩后,与机器人进行通信,获取机器人当前位置信息;根据当前位置信息与预设位置信息,判断机器人是否被推送错充电桩:若当前位置信息与预设位置信息相同,则机器人未被推送错充电桩;若当前位置信息与预设位置信息不同,则机器人被推送错充电桩,将当前位置的任务下发至机器人,以便机器人执行正确的任务。该方法解决了机器人被推送错充电桩迷路的问题;避免了机器人因执行错误任务而损坏。
技术研发人员:李航,齐心,支涛
受保护的技术使用者:北京云迹科技股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!