一款多品种机器人旋转头的制作方法
本发明涉及机器人旋转头,具体涉及一款多品种机器人旋转头。
背景技术:
1、随着科学技术的不断发展,激光技术与应用发展迅猛,已与多个学科相结合形成多个应用技术领域,比如光电技术,激光医疗与光子生物学,激光加工技术,激光检测与计量技术等,这些交叉技术与新的学科的出现,大大地推动了传统产业和新兴产业的发展。
2、其中,机器人在各个行业中都有涉及,利用机器人代替人工能够大大的提高工作效率,并且能够制作出的产品能够保证很好的一致性,其中,机器人在工作时,需要利用旋转头对工件进行夹持,但是,现有的旋转头不能够适用于多种机器人,适用性低,在不同的机器人对不同尺寸的工件进行夹取、固定时需要用到不同的旋转头,旋转头通用性低。
3、鉴于此,本发明提出了一款多品种机器人旋转头。
技术实现思路
1、1.要解决的技术问题
2、本发明的目的在于提供一款多品种机器人旋转头,以解决上述背景技术中提出的问题。
3、2.技术方案
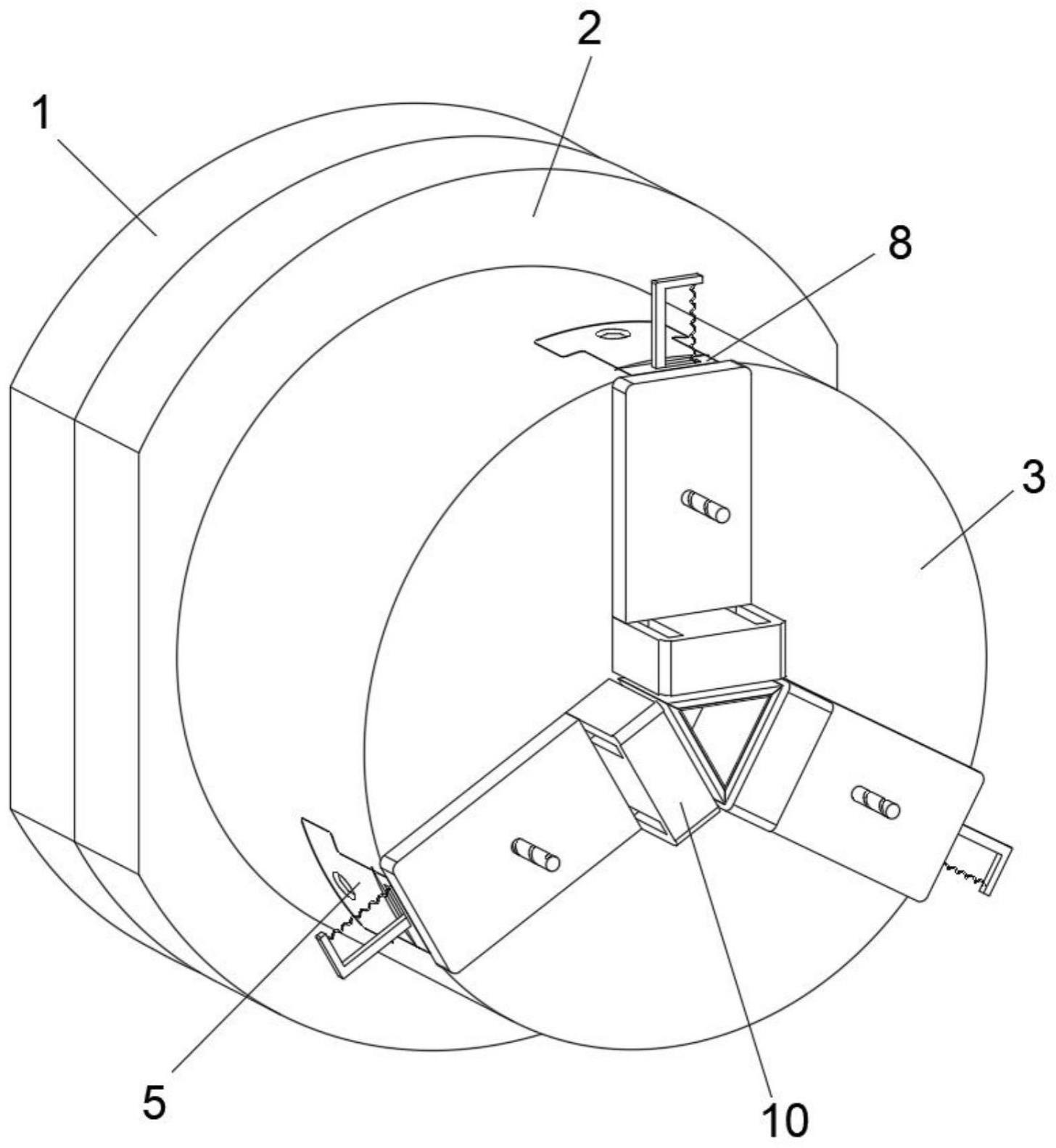
4、一款多品种机器人旋转头,包括安装盘和固定盘,所述固定盘上固定连接有固定块,所述固定块上开设有多个第一滑槽,所述第一滑槽内部设有调节机构,所述调节机构包括与第一滑槽滑动连接的滑条;
5、所述滑条远离固定盘的一端固定开设有第二滑槽,所述第二滑槽内部设有带动机构,所述带动机构包括滑动安装在第二滑槽内部的滑块,所述滑块上设有夹紧机构。
6、作为本申请技术方案的一种可选方案,所述调节机构还包括与固定块转动连接的螺纹杆,所述螺纹杆贯穿滑条并与其螺纹连接。
7、作为本申请技术方案的一种可选方案,所述带动机构还包括固定安装在第二滑槽内部的电动伸缩杆,所述电动伸缩杆靠近滑块的一端固定安装有第一移动板,所述第一移动板上固定安装有两个第一导杆,所述第一导杆与滑块滑动连接。
8、作为本申请技术方案的一种可选方案,所述夹紧机构包括与滑块固定连接移动条,所述移动条上固定安装有夹块,所述夹块上固定安装有第二移动板,所述第二移动板远离夹块的一端固定安装有橡胶垫,所述第二移动板上固定安装有第二导杆,所述夹块内部开设有第二活塞腔,所述第二活塞腔内部滑动安装有第二活塞板,所述第二导杆与第二活塞板固定连接。
9、作为本申请技术方案的一种可选方案,所述移动条内部开设有空腔,所述空腔两侧滑动安装有摩擦板,所述摩擦板与第一滑槽内壁摩擦接触,所述第二活塞腔与空腔内部连通。
10、作为本申请技术方案的一种可选方案,所述滑块内部开设有第一活塞腔,所述第一活塞腔内部滑动安装有第一活塞板,所述第一导杆靠近第一活塞板的一端与第一活塞板固定连接,所述第一活塞腔与空腔内部连通。
11、作为本申请技术方案的一种可选方案,所述第一活塞板上固定安装有第一弹簧,所述第一弹簧另一端与第一活塞腔内部固定连接,所述第二活塞板上固定安装有第二弹簧,所述第二弹簧另一端与第二活塞腔内壁固定连接。
12、作为本申请技术方案的一种可选方案,所述夹块上开设有两个导槽,所述导槽内部滑动安装有导块,两个所述导块上固定安装有撑杆,所述移动条内部转动连接有齿轮,所述齿轮靠近撑杆的一端转动连接有转动杆,所述转动杆外壁开设有螺纹槽,所述撑杆上的凸起部与螺纹槽内壁滑动接触,所述移动条上相对齿轮的位置滑动安装有齿条,所述齿条与齿轮啮合传动,所述齿条与移动条之间设有第三弹簧,所述第三弹簧两端分别与齿条、移动条固定连接。
13、3.有益效果
14、相比于现有技术,本发明的优点在于:
15、(1)本发明通过设置的调节机构能够便于调节带动机构和夹紧机构的位置,从而使得该装置能够适用于不同的机器人,通用性高,多种机器人在使用时,工作人员只需要更换一种旋转头即可,操作方便。
16、(2)本发明通过设置的第二活塞板在夹块将工件夹住时能够对第二活塞腔中的空气进行挤压,从而使得摩擦板与第一滑槽内壁挤压接触,增加摩擦力,使得夹块在将工件夹住并旋转时更加稳定。
17、(3)本发明通过设置的第一活塞板和第一移动板能够在电动伸缩杆收缩时先将空腔内部的空气吸进第一活塞腔内部,进而能够使得摩擦板与第一滑槽内壁分开,以此能够降低与第一滑槽之间的摩擦力,使得移动条和滑块能够轻松移动。
18、(4)本发明通过设置的撑杆在齿条、齿轮及转动杆的作用下能够使该装置在对空心的工件进行固定时,撑杆相对移动条发生移动,并且与移动条同时顶在空心工件的内壁上,增加接触面并增加移动条与撑杆之间的距离,使得空心工件被固定时更加稳定。
技术特征:
1.一款多品种机器人旋转头,包括安装盘(1)和固定盘(2),其特征在于:所述固定盘(2)上固定连接有固定块(3),所述固定块(3)上开设有多个第一滑槽(4),所述第一滑槽(4)内部设有调节机构(5),所述调节机构(5)包括与第一滑槽(4)滑动连接的滑条(6);
2.根据权利要求1所述的一款多品种机器人旋转头,其特征在于:所述调节机构(5)还包括与固定块(3)转动连接的螺纹杆(11),所述螺纹杆(11)贯穿滑条(6)并与其螺纹连接。
3.根据权利要求2所述的一款多品种机器人旋转头,其特征在于:所述带动机构(8)还包括固定安装在第二滑槽(7)内部的电动伸缩杆(12),所述电动伸缩杆(12)靠近滑块(9)的一端固定安装有第一移动板(13),所述第一移动板(13)上固定安装有两个第一导杆(14),所述第一导杆(14)与滑块(9)滑动连接。
4.根据权利要求3所述的一款多品种机器人旋转头,其特征在于:所述夹紧机构(10)包括与滑块(9)固定连接移动条(15),所述移动条(15)上固定安装有夹块(16),所述夹块(16)上固定安装有第二移动板(17),所述第二移动板(17)远离夹块(16)的一端固定安装有橡胶垫(18),所述第二移动板(17)上固定安装有第二导杆(19),所述夹块(16)内部开设有第二活塞腔(20),所述第二活塞腔(20)内部滑动安装有第二活塞板(21),所述第二导杆(19)与第二活塞板(21)固定连接。
5.根据权利要求4所述的一款多品种机器人旋转头,其特征在于:所述移动条(15)内部开设有空腔(22),所述空腔(22)两侧滑动安装有摩擦板(23),所述摩擦板(23)与第一滑槽(4)内壁摩擦接触,所述第二活塞腔(20)与空腔(22)内部连通。
6.根据权利要求5所述的一款多品种机器人旋转头,其特征在于:所述滑块(9)内部开设有第一活塞腔(24),所述第一活塞腔(24)内部滑动安装有第一活塞板(25),所述第一导杆(14)靠近第一活塞板(25)的一端与第一活塞板(25)固定连接,所述第一活塞腔(24)与空腔(22)内部连通。
7.根据权利要求6所述的一款多品种机器人旋转头,其特征在于:所述第一活塞板(25)上固定安装有第一弹簧(26),所述第一弹簧(26)另一端与第一活塞腔(24)内部固定连接,所述第二活塞板(21)上固定安装有第二弹簧(27),所述第二弹簧(27)另一端与第二活塞腔(20)内壁固定连接。
8.根据权利要求7所述的一款多品种机器人旋转头,其特征在于:所述夹块(16)上开设有两个导槽(28),所述导槽(28)内部滑动安装有导块(29),两个所述导块(29)上固定安装有撑杆(30),所述移动条(15)内部转动连接有齿轮(31),所述齿轮(31)靠近撑杆(30)的一端转动连接有转动杆(32),所述转动杆(32)外壁开设有螺纹槽(33),所述撑杆(30)上的凸起部与螺纹槽(33)内壁滑动接触,所述移动条(15)上相对齿轮(31)的位置滑动安装有齿条(34),所述齿条(34)与齿轮(31)啮合传动,所述齿条(34)与移动条(15)之间设有第三弹簧(35),所述第三弹簧(35)两端分别与齿条(34)、移动条(15)固定连接。
技术总结
本发明公开了一款多品种机器人旋转头,属于机器人旋转头技术领域。一款多品种机器人旋转头,包括安装盘和固定盘,固定盘上固定连接有固定块,固定块上开设有多个第一滑槽,第一滑槽内部设有调节机构,调节机构包括与第一滑槽滑动连接的滑条,滑条远离固定盘的一端固定开设有第二滑槽,第二滑槽内部设有带动机构,带动机构包括滑动安装在第二滑槽内部的滑块,滑块上设有夹紧机构,本发明通过设置的调节机构能够便于调节带动机构和夹紧机构的位置,从而使得该装置能够适用于不同的机器人,通用性高,多种机器人在使用时,工作人员只需要更换一种旋转头即可,操作方便。
技术研发人员:仇哲瀚,龚旭东,万涛
受保护的技术使用者:昌坚工业(安徽)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!