机器人的碰撞检测优化方法及装置、电子设备、存储介质与流程
本申请涉及机器人,尤其涉及一种机器人的碰撞检测优化方法及装置、电子设备、存储介质。
背景技术:
1、现有的机器人碰撞检测方法,一般是基于固定的检测模型,通过机器人关节电流信息,或者通过外加传感器,例如关节力矩传感器、底座传感器或者加速度计等,得到一个或多个物理量的检测值,再与预设模型根据机器人当前状态所得到的预测值进行比较,以判断是否发生碰撞。但是,在实际工业现场的应用场景中,由于现场情况复杂多变,出厂预设的检测模型不一定恰好适配应用场景,无法确保能够对相关物理量进行准确地预测,可能会出现机器人检测的误报碰撞情况,不利于提高机器人运行的安全性与鲁棒性。因此,如何降低出现机器人检测的误报碰撞情况的概率,提高机器人运行的安全性与鲁棒性,成为了亟待解决的技术问题。
技术实现思路
1、本申请实施例的主要目的在于提出一种机器人的碰撞检测优化方法及装置、电子设备、存储介质,旨在降低出现机器人检测的误报碰撞情况的概率,提高机器人运行的安全性与鲁棒性。
2、为实现上述目的,本申请实施例的第一方面提出了一种机器人的碰撞检测优化方法,所述方法包括:
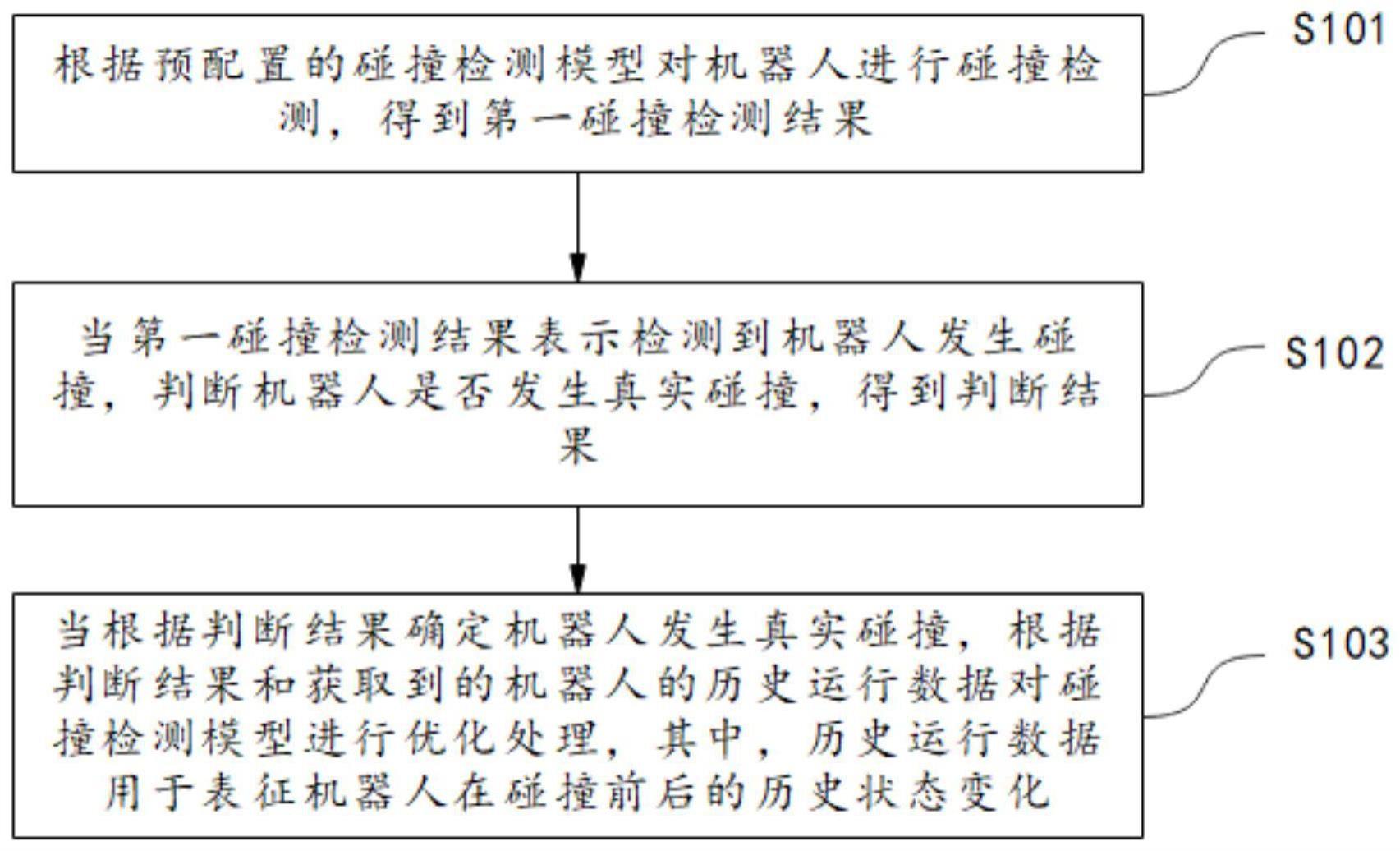
3、根据预配置的碰撞检测模型对所述机器人进行碰撞检测,得到第一碰撞检测结果;
4、当所述第一碰撞检测结果表示检测到所述机器人发生碰撞,判断所述机器人是否发生真实碰撞,得到判断结果;
5、当根据所述判断结果确定所述机器人发生真实碰撞,根据所述判断结果和获取到的所述机器人的历史运行数据对所述碰撞检测模型进行优化处理,其中,所述历史运行数据用于表征所述机器人在碰撞前后的历史状态变化。
6、在一些实施例中,所述根据所述判断结果和获取到的所述机器人的历史运行数据对所述碰撞检测模型进行优化处理,包括:
7、基于预训练的自学习模型,根据所述判断结果和获取到的所述机器人的历史运行数据对所述碰撞检测模型进行强化学习。
8、在一些实施例中,所述方法还包括:
9、当根据所述判断结果确定所述机器人未发生真实碰撞,根据所述判断结果和所述历史运行数据对所述机器人进行诊断处理,得到对于所述机器人的诊断结果。
10、在一些实施例中,所述得到对于所述机器人的诊断结果之后,所述方法还包括:
11、根据所述诊断结果生成对于所述机器人的诊断处理建议信息。
12、在一些实施例中,所述方法还包括:
13、当所述第一碰撞检测结果表示检测到所述机器人发生碰撞,根据所述第一碰撞检测结果执行预设的碰撞响应程序。
14、在一些实施例中,所述方法还包括:
15、当根据所述判断结果确定所述机器人未发生真实碰撞,维持所述碰撞检测模型。
16、在一些实施例中,所述根据预配置的碰撞检测模型对所述机器人进行碰撞检测之前,所述方法还包括:
17、从多个预设的碰撞检测算法中,选择一个碰撞检测算法作为目标碰撞检测算法;
18、根据所述目标碰撞检测算法配置所述碰撞检测模型。
19、为实现上述目的,本申请实施例的第二方面提出了一种机器人的碰撞检测优化装置,所述装置包括:
20、碰撞检测模块,用于根据预配置的碰撞检测模型对所述机器人进行碰撞检测,得到第一碰撞检测结果;
21、判断模块,用于当所述第一碰撞检测结果表示检测到所述机器人发生碰撞,判断所述机器人是否发生真实碰撞,得到判断结果;
22、优化处理模块,用于当根据所述判断结果确定所述机器人发生真实碰撞,根据所述判断结果和获取到的所述机器人的历史运行数据对所述碰撞检测模型进行优化处理,其中,所述历史运行数据用于表征所述机器人在碰撞前后的历史状态变化。
23、为实现上述目的,本申请实施例的第三方面提出了一种电子设备,所述电子设备包括内存和处理器,所述内存存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的方法。
24、为实现上述目的,本申请实施例的第四方面提出了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的方法。
25、本申请提出的机器人的碰撞检测优化方法及装置、电子设备、存储介质,在通过预配置的碰撞检测模型对机器人进行碰撞检测而得到第一碰撞检测结果的情况下,若第一碰撞检测结果表示检测到机器人发生碰撞,则继续判断机器人是否发生真实碰撞,即采用两次碰撞检测的方式进行检测判断,以降低出现机器人检测的误报碰撞情况的概率,并且在根据判断结果确定机器人发生真实碰撞的情况下,基于机器人的历史运行数据对碰撞检测模型进行优化处理,由于历史运行数据可以表征应用场景下的机器人在碰撞前后的历史状态变化,因此对于碰撞检测模型进行优化处理,能够使得机器人更加适应于应用场景,有利于提高机器人运行的安全性与鲁棒性。
技术特征:
1.一种机器人的碰撞检测优化方法,其特征在于,包括:
2.根据权利要求1所述的机器人的碰撞检测优化方法,其特征在于,所述根据所述判断结果和获取到的所述机器人的历史运行数据对所述碰撞检测模型进行优化处理,包括:
3.根据权利要求1所述的机器人的碰撞检测优化方法,其特征在于,所述方法还包括:
4.根据权利要求3所述的机器人的碰撞检测优化方法,其特征在于,所述得到对于所述机器人的诊断结果之后,所述方法还包括:
5.根据权利要求1所述的机器人的碰撞检测优化方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的机器人的碰撞检测优化方法,其特征在于,所述方法还包括:
7.根据权利要求1所述的机器人的碰撞检测优化方法,其特征在于,所述根据预配置的碰撞检测模型对所述机器人进行碰撞检测之前,所述方法还包括:
8.一种机器人的碰撞检测优化装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,所述电子设备包括内存和处理器,所述内存存储有计算机程序,所述处理器执行所述计算机程序时实现权利要求1至7任一项所述的机器人的碰撞检测优化方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的机器人的碰撞检测优化方法。
技术总结
本申请实施例提供了一种机器人的碰撞检测优化方法及装置、电子设备、存储介质,属于机器人技术领域,其中,碰撞检测优化方法包括:根据预配置的碰撞检测模型对机器人进行碰撞检测,得到第一碰撞检测结果;当第一碰撞检测结果表示检测到机器人发生碰撞,判断机器人是否发生真实碰撞,得到判断结果;当根据判断结果确定机器人发生真实碰撞,根据判断结果和获取到的机器人的历史运行数据对碰撞检测模型进行优化处理。本申请实施例中,基于历史运行数据对碰撞检测模型进行优化处理,由于历史运行数据表征机器人在碰撞前后的历史状态变化,因此对碰撞检测模型进行优化处理,使得机器人更加适应于应用场景,有利于提高机器人运行的安全性与鲁棒性。
技术研发人员:杨帆,李明洋,刘博峰,许雄,李旺
受保护的技术使用者:节卡机器人股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!