一种机器人末端鼠笼保护罩结构的制作方法
本发明涉及一种机器人末端鼠笼保护罩结构,属于机器人。
背景技术:
1、在一些自动化上下料设备中,很多工件具有脆性,不能承受冲击,还有一些工件的表面非常光滑,在上下料抓取的过程中容易损伤工件表面的质量,这类零件在机械手或者机器人进行搬运的过程中要特别注意安全防护,在机械手末端设计安全防护罩是一种简单又高效的方式。保护罩一方面在运输过程中起到保护作用,另一方面在工件拿起或者放下时保护罩要收缩,不能影响工件放置。现有技术中还没有适用于机械手的保护罩,尤其是缺少适用于圆柱形工件机械手搬运的保护罩。
2、申请号为cn201920052262.0的中国实用新型专利公开了一种用于夹持圆柱形物体的机器人末端执行器,包括定夹爪、与连接法兰和定夹爪连接的中间连接部和加强板、与定夹爪转动连接且与定夹爪相配合以夹紧圆柱形物体的动夹爪以及设置于定夹爪上且用于控制动夹爪进行转动的驱动装置。用于夹持圆柱形物体的机器人末端执行器,有效解决机器人水平搬运大直径纸套筒的问题,提高纸套筒的安装效率;中间连接部及加强板的设置,起到保证末端执行器整体刚度、强度和适当柔韧度的作用。无法解决在搬运圆柱工件的过程中对圆柱形工件起到保护的作用。
技术实现思路
1、本发明的目的在于针对上述存在的机器人在搬运圆柱形工件的过程中容易损伤工件的问题,提供一种机器人末端鼠笼保护罩结构。
2、本发明是通过以下技术方案实现的:
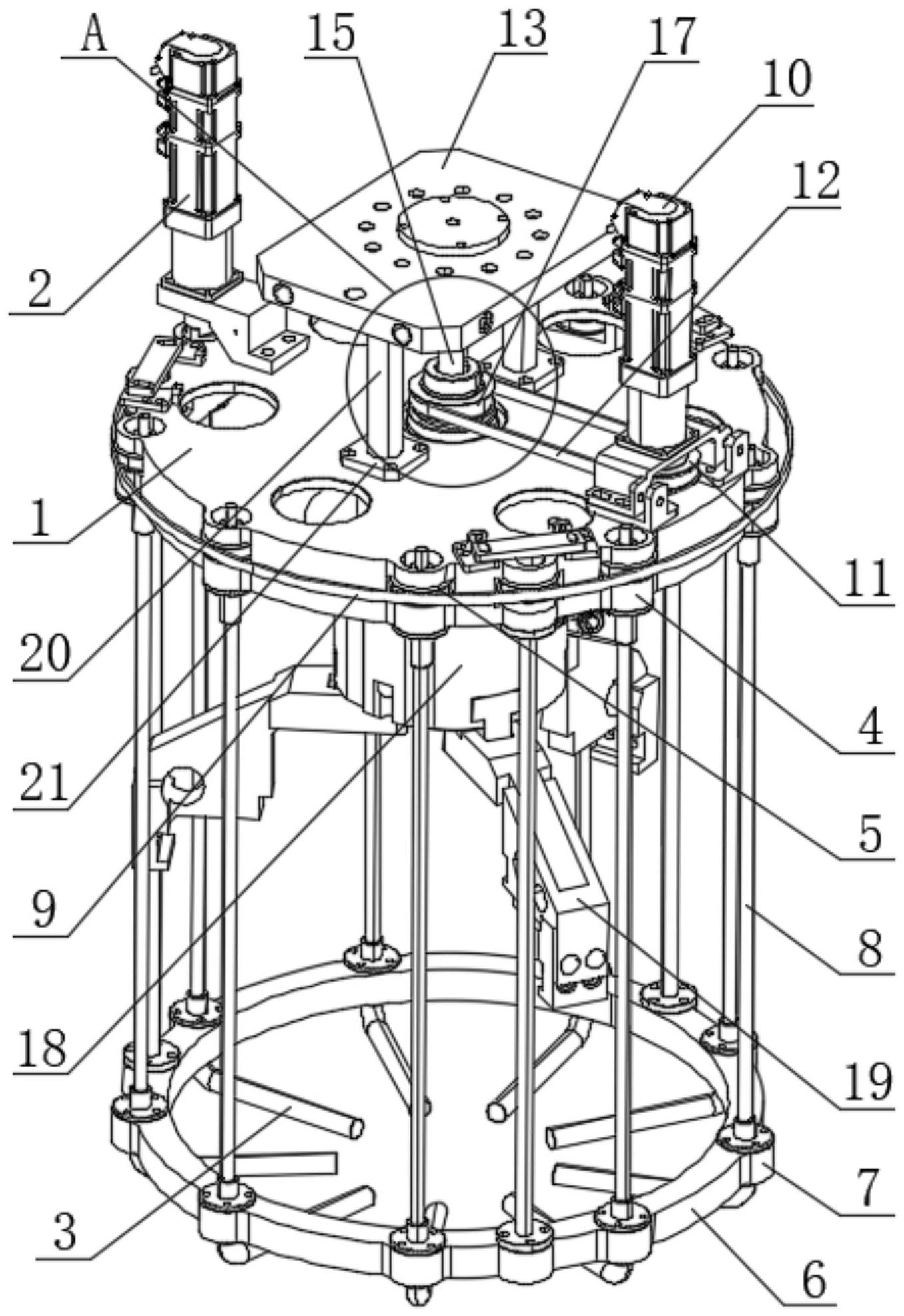
3、即一种机器人末端鼠笼保护罩结构,包括三爪气缸,三爪气缸上的三个夹爪用于夹紧圆柱形工件,还包括上盖板和下圆环,上盖板与下圆环之间转动安装有若干个保护杆,保护杆下端由下圆环下端伸出,保护杆下端安装有支撑杆,每个保护杆上部均安装有一个同步带轮一,上盖板上端安装有竖直升降电机和旋转电机;
4、旋转电机的转轴通过联轴器与其中一个保护杆连接,所有的同步带轮一通过一个同步带一相连,上盖板中心处安装有丝杠,丝杠上套设有丝母,旋转电机与丝母相连,三爪气缸上端与丝杠底端固定相连。
5、本发明在抓取工件之前,支撑杆处于圆周切线方向布置,竖直升降电机控制三爪气缸升降夹取圆柱形工件,三爪气缸夹取圆柱形工件后,旋转电机控制支撑杆旋转至朝向轴心处,形成支撑面,圆柱形工件即使掉落也会被支撑杆接住,防止意外发生,保护杆在搬运工件过程中起到防止磕碰的作用。
6、本发明的进一步改进还有,竖直升降电机转轴上安装有同步带轮二,丝母上安装有同步带轮三,同步带轮二与同步带轮三通过同步带二相连。竖直升降电机通过同步带驱动丝母旋转,丝杠上下移动带动三爪气缸升降,同步带传动兼有带传动、齿轮传动及链传动的优点,传动平稳,能吸收振动,噪声小。
7、本发明的进一步改进还有,竖直升降电机转轴上安装有主动齿轮,丝母上安装有被动齿轮,主动齿轮与被动齿轮相啮合。竖直升降电机通过齿轮传动带动丝母转动,丝杠上下移动带动三爪气缸升降,传动平稳、缓冲吸振、结构简单、成本低、使用维护方便。
8、本发明的进一步改进还有,丝杠上端安装有升降板,升降板下端还固定设有两个升降杆,升降杆下端伸入到上盖板下方与三爪气缸顶端固定相连。两个升降杆对三爪气缸的升降起到导向作用,提高搬运工件的稳定性。
9、本发明的进一步改进还有,升降杆上套设有导向套,导向套安装在上盖板内。导向套对升降杆起到导向作用。
10、本发明的进一步改进还有,上盖板边缘处设有若干个上旋转支撑部,下圆环上设有与上旋转支撑部数量相同的下旋转支撑部。保护杆安装在上旋转支撑部于下旋转支撑部之间,保证所有的支撑杆能够同步顺畅的转动。
11、本发明的进一步改进还有,上旋转支撑部与下旋转支撑部上下竖直一一对应。
12、本发明的进一步改进还有,上旋转支撑部、下旋转支撑部的内部设有轴承,保护杆的上下两端安装在轴承内。
13、与现有技术相比,本发明所具有的有益效果是:
14、本发明在抓取工件之前,支撑杆处于圆周切线方向布置,竖直升降电机控制三爪气缸升降夹取圆柱形工件,三爪气缸夹取圆柱形工件后,旋转电机控制支撑杆旋转至朝向轴心处,形成支撑面,圆柱形工件即使掉落也会被支撑杆接住,防止意外发生,保护杆在搬运工件过程中起到防止磕碰的作用。
技术特征:
1.一种机器人末端鼠笼保护罩结构,包括三爪气缸(18),三爪气缸(18)上的三个夹爪用于夹紧圆柱形工件(14),其特征在于,还包括上盖板(1)和下圆环(6),上盖板(1)与下圆环(6)之间转动安装有若干个保护杆(8),保护杆(8)下端由下圆环(6)下端伸出,保护杆(8)下端安装有支撑杆(3),每个保护杆(8)上部均安装有一个同步带轮一(5),上盖板(1)上端安装有竖直升降电机(10)和旋转电机(2);
2.根据权利要求1所述的一种机器人末端鼠笼保护罩结构,其特征在于,竖直升降电机(10)转轴上安装有同步带轮二(11),丝母(16)上安装有同步带轮三(17),同步带轮二(11)与同步带轮三(17)通过同步带二(12)相连。
3.根据权利要求1所述的一种机器人末端鼠笼保护罩结构,其特征在于,竖直升降电机(10)转轴上安装有主动齿轮,丝母(16)上安装有被动齿轮,主动齿轮与被动齿轮相啮合。
4.根据权利要求1所述的一种机器人末端鼠笼保护罩结构,其特征在于,丝杠(15)上端安装有升降板(13),升降板(13)下端还固定设有两个升降杆(20),升降杆(20)下端伸入到上盖板(1)下方与三爪气缸(18)顶端固定相连。
5.根据权利要求4所述的一种机器人末端鼠笼保护罩结构,其特征在于,升降杆(20)上套设有导向套(21),导向套(21)安装在上盖板(1)内。
6.根据权利要求1所述的一种机器人末端鼠笼保护罩结构,其特征在于,上盖板(1)边缘处设有若干个上旋转支撑部(4),下圆环(6)上设有与上旋转支撑部(4)数量相同的下旋转支撑部(7)。
7.根据权利要求6所述的一种机器人末端鼠笼保护罩结构,其特征在于,上旋转支撑部(4)与下旋转支撑部(7)上下竖直一一对应。
8.根据权利要求1所述的一种机器人末端鼠笼保护罩结构,其特征在于,上旋转支撑部(4)、下旋转支撑部(7)的内部设有轴承,保护杆(8)的上下两端安装在轴承内。
技术总结
本发明涉及一种机器人末端鼠笼保护罩结构,属于机器人技术领域,包括三爪气缸,三爪气缸上的三个夹爪用于夹紧圆柱形工件,还包括上盖板和下圆环,上盖板与下圆环之间转动安装有若干个保护杆,保护杆下端由下圆环下端伸出,保护杆下端安装有支撑杆,每个保护杆上部均安装有一个同步带轮一,上盖板上端安装有竖直升降电机和旋转电机,旋转电机的转轴通过联轴器与其中一个保护杆连接,所有的同步带轮一通过一个同步带一相连,上盖板中心处安装有丝杠,丝杠上套设有丝母,旋转电机与丝母相连,三爪气缸上端与丝杠底端固定相连。使用本发明搬运圆柱形工件,可避免工件意外掉落、磕碰。
技术研发人员:王晓昌,阴俊红,张国,景年强
受保护的技术使用者:山东精卓科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!