一种智能机器人远程管理系统
本发明涉及智能机器人,具体涉及一种智能机器人远程管理系统。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器。机器人能够通过编程和自动控制来执行诸如作业或移动等任务。
2、机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3、目前,机器人广泛应用于工业、教育、救援、医疗等领域,然而绝大多数的机器人远程控制系统往往仅能实现指定控制命令的传输,对机器人的管理及监管程度较差,从而导致群体机器人远程控制时易出现报错及故障。
技术实现思路
1、针对现有技术所存在的上述缺点,本发明提供了一种智能机器人远程管理系统,解决了上述背景技术中提出的技术问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:
3、一种智能机器人远程管理系统,包括:
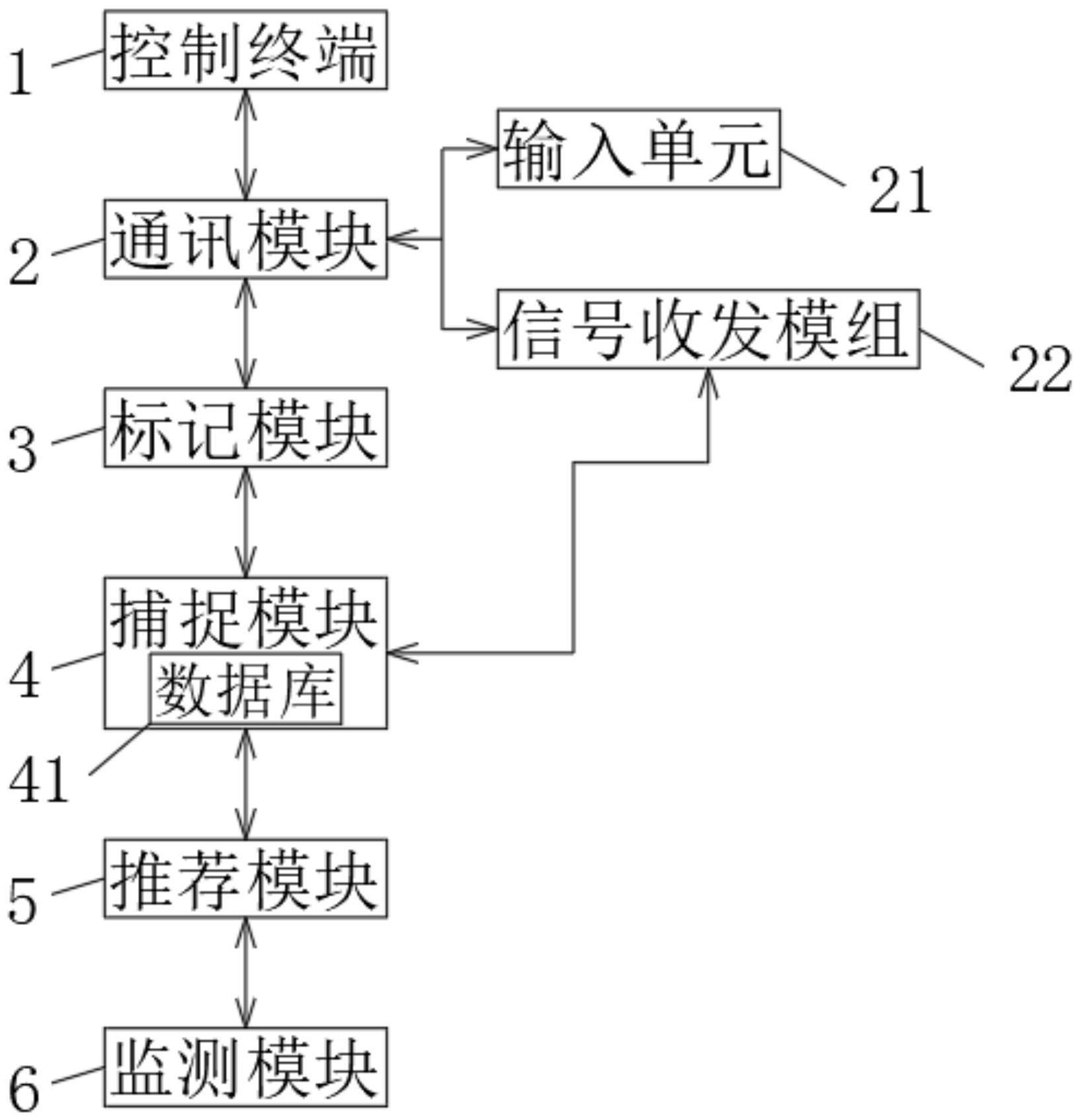
4、控制终端,是系统的主控端,用于发出执行命令;
5、通讯模块,用于传输控制命令提供至智能机器人,驱动智能机器人运行;
6、标记模块,用于对各智能机器人进行区别标记;
7、捕捉模块,用于捕捉通讯模块中传输至智能机器人的控制命令;
8、推荐模块,用于生成智能机器人控制命令推荐项;
9、监测模块,用于监测智能机器人运行参数。
10、更进一步地,所述通讯模块下级设置有子模块,包括:
11、输入单元,用于输入位置坐标;
12、信号收发模组,用于接收及发送控制命令,直至控制命令送达至智能机器人;
13、其中,输入单元中输入的位置坐标通过系统端用户手动输入,输入单元中输入的位置坐标不少于三组,输入单元中输入的位置坐标用于确定系统服务区域,信号收发模组设置有若干组,若干组所述信号收发模块均通过系统端用户手动设定部署于系统服务区域内,每组信号收发模组至少与两组其他信号收发模组连接,至少有两组信号收发模组与智能机器人相连接,系统端用户通过移动设备连接系统服务区域内任意一组信号收发模组完成控制命令的发送。
14、更进一步地,所述控制命令于信号收发模组中传输时,同步通过对传输的控制命令进行加密,控制命令的加密及解密通过下式求取,公式为:
15、
16、式中:c为加密后的控制命令;p为解密后的控制命令;为第一重加密块编码;第二重加密块编码、第三重加密块编码。
17、更进一步地,所述加密块编码来源于加密块编码数据库,加密块编码数据库通过系统端用户手动设定,基于加密块编码数据库通过下式求取所要应用的加密块编码,公式为:
18、
19、式中:tr为输出的加密块编码;i0为加密块编码的集合;ωi为加密块编码换算系数;ai为第i类加密块编码的矩阵面域;f为加密块编码序列数。
20、更进一步地,所述标记模块对智能机器人所执行的区别标记应用阿拉伯数字及字母进行标记;
21、其中,信号收发模块中传输的控制命令中包含有智能机器人的标记。
22、更进一步地,所述捕捉模块运行捕捉控制命令时,同步获取捕捉到的控制命令的始发时间戳及控制命令始发应用的信号收发模组,所述捕捉模块内部设置有子模块,包括:
23、数据库,用于接收捕捉模块中捕捉到的控制命令及其对应始发时间戳、控制命令始发应用的信号收发模组;
24、其中,所述捕捉模块中设置有捕捉周期,捕捉模块根据步骤周期进行控制命令的捕捉。
25、更进一步地,所述推荐模块中生成的智能机器人控制命令推荐项发送目标为系统端用户的移动设备,所述推荐模块运行时,同步获取捕捉模块中连续三组捕捉周期内捕捉到的控制命令及其对应始发时间戳、控制命令始发应用的信号收发模组,推荐模块根据三组捕捉周期内捕捉到的控制命令中,与当前信号收发模组中传输的控制命令相同的控制命令后续传输的控制命令,作为智能机器人控制命令推荐项反馈至系统端用户的移动设备;
26、其中,所述推荐模块获取控制命令及其对应始发时间戳、控制命令始发应用的信号收发模组时,于数据库中获取,数据库中仅储存三组捕捉周期内捕捉模块所捕捉到的数据,并在每次新的捕捉周期结束时,完成数据库中储存数据的迭代。
27、更进一步地,所述监测模块中监测的智能机器人运行参数包括:运行功率、电压、电流、温度、湿度,智能机器人通过其连接的信号收发模组完成实时运行参数的传输,信号收发模组中系统端用户手动设定有运行参数安全判定阈值,任意一组未处于控制命令传输状态的信号收发模组在接收到智能机器人运行参数时,应用运行参数安全判定阈值与智能机器人运行参数进行比对,在任一比对结果为不处于运行参数安全判定阈值时,信号收发模组自主发出关闭智能机器人的控制命令。
28、更进一步地,所述监测模块在监测到智能机器人运行参数,且运行参数不处于运行参数安全判定阈值时,监测模块同步获取智能机器人当前所处捕捉模块捕捉周期内所执行的控制命令,并将获取的控制命令打包,进一步通过信号收发模组向系统端用户的移动设备反馈。
29、更进一步地,所述控制终端通过介质电性连接有通讯模块,所述通讯模块下级通过介质电性连接有输入单元及信号收发模组,所述通讯模块通过介质电性连接有标记模块及捕捉模块,所述捕捉模块内部通过介质电性连接有数据库,所述数据库通过介质电性与信号收发模块相连接,所述捕捉模块通过介质电性连接有推荐模块及监测模块。
30、采用本发明提供的技术方案,与已知的公有技术相比,具有如下有益效果:
31、1、本发明提供一种智能机器人远程管理系统,该系统在运行过程中,提供了一种独立的控制命令传输系统,基于控制命令传输系统以实现智能机器人的远程管理,对于智能机器人所要执行的控制命令具备捕捉、储存功能,进而以储存的智能机器人控制命令执行数据来为智能机器人提供控制命令推荐,一定程度的降低了用户端在控制智能机器人时所需键入的控制命令量,为系统端用户在控制智能机器人时带来便利。
32、2、本发明中系统在运行过程中,能够对系统中传输的智能机器人所用的控制命令进行加密传输,从而以此保证控制命令传输过程中的安全性,降低控制命令信息被窃取的风险。
33、3、本发明中系统在运行过程中,还能够对智能机器人的运行状态进行实时监控,并在监测到智能机器人存在异常时,能够及时且自主的发出智能机器人关闭控制命令,较大限度的保全了智能机器人,避免智能机器人在出现异常故障时,因关闭不及时而导致的异常故障变劣。
技术特征:
1.一种智能机器人远程管理系统,其特征在于,包括:
2.根据权利要求1所述的一种智能机器人远程管理系统,其特征在于,所述通讯模块(2)下级设置有子模块,包括:
3.根据权利要求1所述的一种智能机器人远程管理系统,其特征在于,所述控制命令于信号收发模组(22)中传输时,同步通过对传输的控制命令进行加密,控制命令的加密及解密通过下式求取,公式为:
4.根据权利要求3所述的一种智能机器人远程管理系统,其特征在于,所述加密块编码来源于加密块编码数据库,加密块编码数据库通过系统端用户手动设定,基于加密块编码数据库通过下式求取所要应用的加密块编码,公式为:
5.根据权利要求1或2所述的一种智能机器人远程管理系统,其特征在于,所述标记模块(3)对智能机器人所执行的区别标记应用阿拉伯数字及字母进行标记;
6.根据权利要求1所述的一种智能机器人远程管理系统,其特征在于,所述捕捉模块(4)运行捕捉控制命令时,同步获取捕捉到的控制命令的始发时间戳及控制命令始发应用的信号收发模组(22),所述捕捉模块(4)内部设置有子模块,包括:
7.根据权利要求1或6所述的一种智能机器人远程管理系统,其特征在于,所述推荐模块(5)中生成的智能机器人控制命令推荐项发送目标为系统端用户的移动设备,所述推荐模块(5)运行时,同步获取捕捉模块(4)中连续三组捕捉周期内捕捉到的控制命令及其对应始发时间戳、控制命令始发应用的信号收发模组(22),推荐模块(5)根据三组捕捉周期内捕捉到的控制命令中,与当前信号收发模组(22)中传输的控制命令相同的控制命令后续传输的控制命令,作为智能机器人控制命令推荐项反馈至系统端用户的移动设备;
8.根据权利要求1所述的一种智能机器人远程管理系统,其特征在于,所述监测模块(6)中监测的智能机器人运行参数包括:运行功率、电压、电流、温度、湿度,智能机器人通过其连接的信号收发模组(22)完成实时运行参数的传输,信号收发模组(22)中系统端用户手动设定有运行参数安全判定阈值,任意一组未处于控制命令传输状态的信号收发模组(22)在接收到智能机器人运行参数时,应用运行参数安全判定阈值与智能机器人运行参数进行比对,在任一比对结果为不处于运行参数安全判定阈值时,信号收发模组(22)自主发出关闭智能机器人的控制命令。
9.根据权利要求1、2或8所述的一种智能机器人远程管理系统,其特征在于,所述监测模块(6)在监测到智能机器人运行参数,且运行参数不处于运行参数安全判定阈值时,监测模块(6)同步获取智能机器人当前所处捕捉模块(4)捕捉周期内所执行的控制命令,并将获取的控制命令打包,进一步通过信号收发模组(22)向系统端用户的移动设备反馈。
10.根据权利要求1所述的一种智能机器人远程管理系统,其特征在于,所述控制终端(1)通过介质电性连接有通讯模块(2),所述通讯模块(2)下级通过介质电性连接有输入单元(21)及信号收发模组(22),所述通讯模块(2)通过介质电性连接有标记模块(3)及捕捉模块(4),所述捕捉模块(4)内部通过介质电性连接有数据库(41),所述数据库(41)通过介质电性与信号收发模块(22)相连接,所述捕捉模块(4)通过介质电性连接有推荐模块(5)及监测模块(6)。
技术总结
本发明涉及智能机器人技术领域,具体涉及一种智能机器人远程管理系统,包括:控制终端,是系统的主控端,用于发出执行命令;通讯模块,用于传输控制命令提供至智能机器人,驱动智能机器人运行;标记模块,用于对各智能机器人进行区别标记;捕捉模块,用于捕捉通讯模块中传输至智能机器人的控制命令;本发明提供了一种独立的控制命令传输系统,基于控制命令传输系统以实现智能机器人的远程管理,对于智能机器人所要执行的控制命令具备捕捉、储存功能,进而以储存的智能机器人控制命令执行数据来为智能机器人提供控制命令推荐,一定程度的降低了用户端在控制智能机器人时所需键入的控制命令量,为系统端用户在控制智能机器人时带来便利。
技术研发人员:李硕,肖哲,黎震
受保护的技术使用者:武昌首义学院
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!