机器人碰撞检测方法、电子设备及存储介质与流程
本发明涉及机器人领域,特别涉及一种机器人碰撞检测方法、电子设备及存储介质。
背景技术:
1、随着智能技术的不断发展,各种移动智能机器人越来越多的出现在我们的生活中。机器人在运动过程中不可避免的会接触到静止或非静止物体,阻碍机器人按照预定轨迹运动。机器人若无法准确、快速识别出障碍物并及时做出避障动作,可能会与障碍物发生持续高强度的碰撞,损坏机器人结构,降低机器人工作效率。此外,机器人若与小动物或者人体发生触碰,可能会对生命造成伤害。为了提高移动智能机器人的运行安全与工作效率,及时、准确的检测出机器人是否在移动过程中发生碰撞,是一个非常有必要研究的问题。
技术实现思路
1、本发明实施方式的目的在于提供一种机器人碰撞检测方法、电子设备及存储介质,能够及时、准确的检测出机器人是否在移动过程中发生碰撞,进而提高机器人的运行安全与工作效率。
2、为解决上述技术问题,本发明的实施方式提供了一种机器人碰撞检测方法,包括:
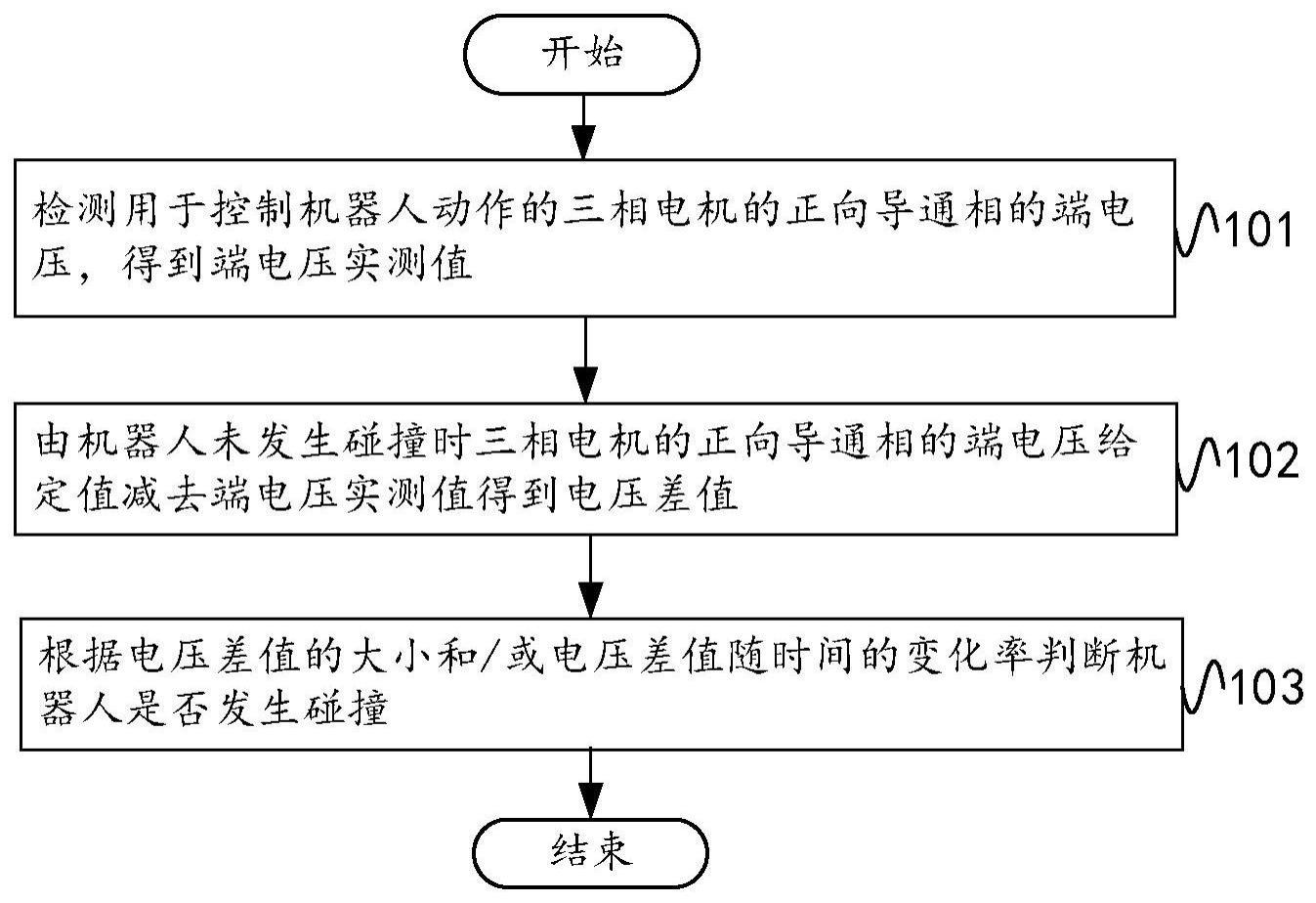
3、检测用于控制机器人动作的电机的正向导通相的端电压,得到端电压实测值;
4、由所述机器人未发生碰撞时所述电机的正向导通相的端电压给定值减去所述端电压实测值得到电压差值;
5、根据所述电压差值的大小和/或所述电压差值随时间的变化率判断所述机器人是否发生碰撞;
6、其中,所述电压差值越大,所述机器人发生碰撞的概率越大;所述电压差值随时间的变化率越大,所述机器人发生碰撞的概率越大。
7、本发明的实施方式还提供了一种电子设备,包括:
8、至少一个处理器;以及,
9、与所述至少一个处理器通信连接的存储器;其中,
10、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如上所述的机器人碰撞检测方法。
11、本发明的实施方式还提供了一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的机器人碰撞检测方法。
12、本发明实施方式相对于现有技术而言,通过检测得到控制机器人动作的电机的正向导通相的端电压实测值与机器人未发生碰撞时端电压给定值,计算得到电压差值,根据电压差值的大小和/或电压差值随时间的变化率判断机器人是否发生碰撞。由于机器人触碰到障碍物时,机器人电机的运行负载会急剧增大,而输入电机导通相的端电压由于负载增大会出现压降,所以,计算得到的电压差值越大,机器人发生碰撞的概率越大;电压差值随时间的变化率越大,机器人发生碰撞的概率越大。通过上述方法能够在机器人工作过程中及时、准确的检测出机器人是否在移动过程中发生碰撞,达到提高机器人的运行安全与工作效率的效果。
技术特征:
1.一种机器人碰撞检测方法,其特征在于,包括:
2.根据权利要求1所述的碰撞检测方法,其特征在于,所述实时检测得到用于控制机器人动作的电机的正向导通相的端电压,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述电压差值序列中各电压差值的大小判断所述机器人是否发生碰撞,包括:
4.根据权利要求2所述的方法,其特征在于,所述根据所述电压差值序列中所述电压差值随时间的变化率判断所述机器人是否发生碰撞,包括:
5.根据权利要求2所述的方法,其特征在于,所述根据所述电压差值序列中所述电压差值随时间的变化率判断所述机器人是否发生碰撞,包括:
6.根据权利要求2所述的方法,其特征在于,所述根据所述电压差值序列中所述电压差值随时间的变化率判断所述机器人是否发生碰撞,包括:
7.根据权利要求4所述的方法,其特征在于,所述确定所述第一电压差值序列随时间变化的第一斜率,包括:
8.根据权利要求5所述的方法,其特征在于,所述确定所述第二电压差值序列随时间变化的第二斜率,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至8中任一项所述的机器人碰撞检测方法。
技术总结
本发明实施例涉及机器人领域,公开了一种机器人碰撞检测方法、电子设备及存储介质,其中方法包括:检测用于控制机器人动作的三相电机的正向导通相的端电压,得到端电压实测值;由所述机器人未发生碰撞时所述三相电机的正向导通相的端电压给定值减去所述端电压实测值得到电压差值;根据所述电压差值的大小和/或所述电压差值随时间的变化率判断所述机器人是否发生碰撞;其中,所述电压差值越大,所述机器人发生碰撞的概率越大;所述电压差值随时间的变化率越大,所述机器人发生碰撞的概率越大。本方案能够在机器人工作过程中及时、准确的检测出机器人是否在移动过程中发生碰撞,提高机器人的运行安全与工作效率。
技术研发人员:王浩东
受保护的技术使用者:江苏东成工具科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!