机器人位姿和行进轨迹修正方法、装置及机器人与流程
本发明涉及人工智能领域,具体而言,涉及一种机器人位姿和行进轨迹修正方法、装置及机器人。
背景技术:
1、随着生活品质的提升,商用及家庭草坪的数量越来越多,尤其在欧美国家,家庭草坪非常普遍,机器人凭借其高效、准确、连续的工作能力,逐渐替代人工执行割草任务,上述工作场景环境复杂、多变,机器人执行割草任务目的是将草切割到预期高度,而目前的割草机器人,通常采用gnss卫星定位等定位方式,实现工作区域的全场景遍历,但因为工作场景的环境复杂,比如,草地环境周围有房子、树木及地面不平等情况,可能导致机器人定位精度偏移,影响机器人执行割草任务的效果及智能化程度,比如导致漏割等情况。
2、目前,机器人为实现割草任务,基本采用全场景遍历式割草方式。通常采用全球导航卫星系统(globalnavigationsatellitesystem,简称为gnss)卫星定位、无线超宽带脉冲(ultrawideband,简称为uwb)定位等定位方式,控制机器人在目标工作场景中无差别的进行全场景遍历,实现工作场景割草。因为工作场景的环境复杂,比如,草地环境周围有房子、墙、树木及地面不平等情况,gnss卫星定位、uwb定位等定位方式均存在对应的不适用场景,导致定位精度降低甚至失效,进而导致采用全场景遍历方式割草可能导致漏割或者到割草区域范围外等情况。
技术实现思路
1、本发明的主要目的在于公开了一种机器人位姿和行进轨迹修正方法、装置及机器人,以至少解决相关技术中采用gnss卫星定位、uwb定位等定位方式,在不适用场景下,导致定位精度降低甚至失效,进而采用全场景遍历方式割草可能导致漏割或者到割草区域范围外等问题。
2、根据本发明的一个方面,提供了一种机器人位姿和行进轨迹修正方法。
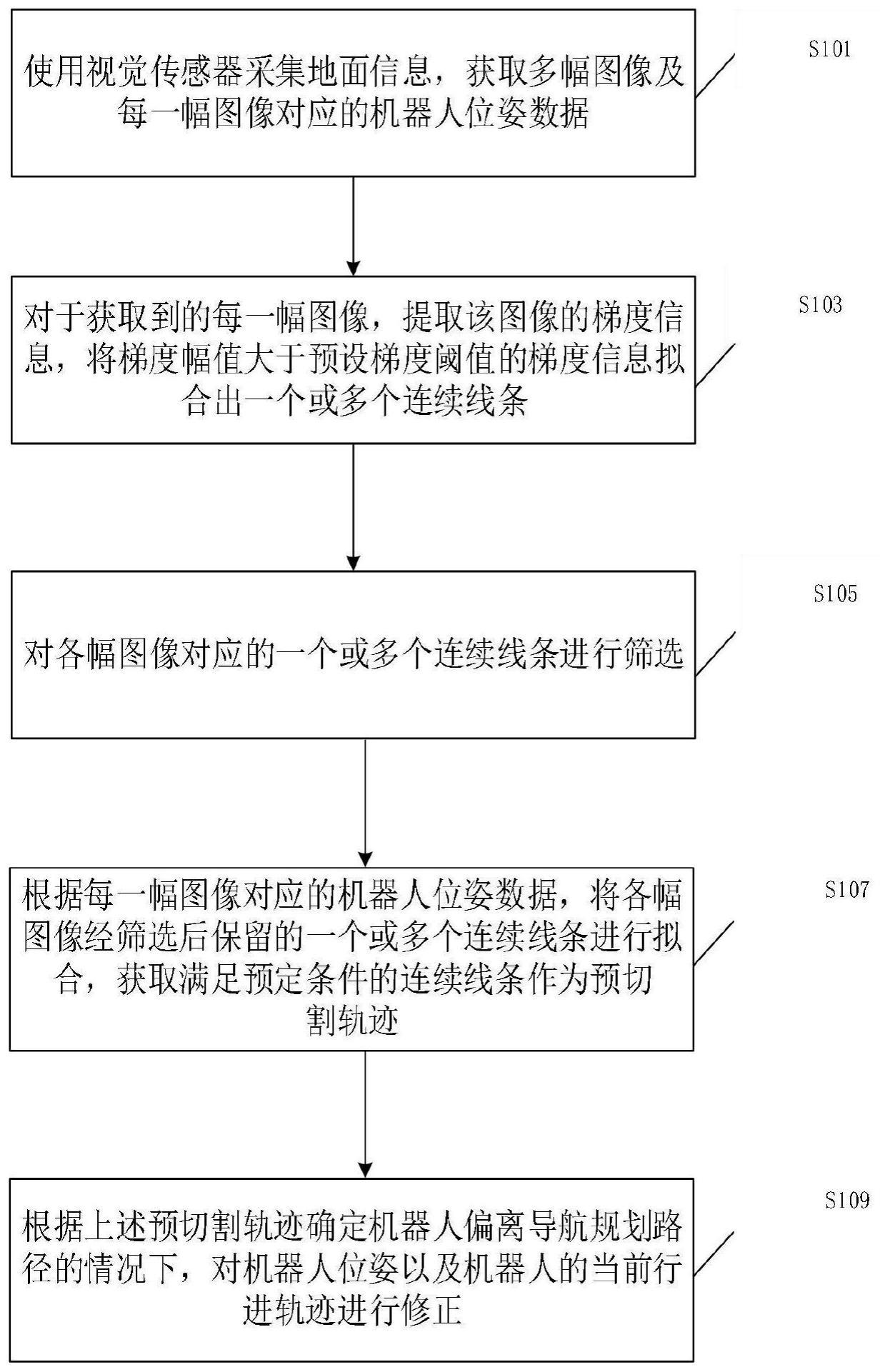
3、根据本发明的机器人位姿和行进轨迹修正方法包括:使用视觉传感器采集地面信息,获取多幅图像及每一幅图像对应的机器人位姿数据;对于获取到的每一幅图像,提取该图像的梯度信息,将梯度幅值大于预设梯度阈值的梯度信息拟合出一个或多个连续线条;对各幅图像对应的一个或多个连续线条进行筛选;根据每一幅图像对应的机器人位姿数据,将各幅图像经筛选后保留的一个或多个连续线条进行拟合,获取满足预定条件的连续线条作为预切割轨迹;根据所述预切割轨迹确定机器人偏离导航规划路径的情况下,对机器人位姿以及机器人的当前行进轨迹进行修正。
4、根据本发明的另一方面,提供了一种机器人位姿和行进轨迹修正装置。
5、根据本发明的机器人位姿和行进轨迹修正装置包括:获取模块,用于使用视觉传感器采集地面信息,获取多幅图像及每一幅图像对应的机器人位姿数据;第一拟合模块,用于对于获取到的每一幅图像,提取该图像的梯度信息,将梯度幅值大于预设梯度阈值的梯度信息拟合出一个或多个连续线条;筛选模块,用于对各幅图像对应的一个或多个连续线条进行筛选;第二拟合模块,用于根据每一幅图像对应的机器人位姿数据,将各幅图像经筛选后保留的一个或多个连续线条进行拟合,获取满足预定条件的连续线条作为预切割轨迹;修正模块,用于根据所述预切割轨迹确定机器人偏离导航规划路径的情况下,对机器人位姿以及机器人的当前行进轨迹进行修正。
6、根据本发明的又一方面,提供了一种机器人。
7、根据本发明的机器人包括:视觉传感器、存储器及处理器,其中,所述视觉传感器,用于按照预定角度的俯仰角向下倾斜设置在所述机器人本体上;所述存储器,用于存储计算机执行指令;所述处理器,用于执行所述存储器存储的计算机执行指令,使得所述机器人执行上述任一项所述的方法。
8、根据本发明,使用视觉传感器采集地面信息,根据采集图像的梯度信息,获取满足预定条件的连续线条作为预切割轨迹,根据所述预切割轨迹确定机器人偏离导航规划路径的情况下,对机器人位姿以及机器人的当前行进轨迹进行修正。可以实现机器人对割草的自动化、智能化检测,避免机器人漏割或者到割草区域范围外,提升了机器人智能化水平及工作效率。
技术特征:
1.一种机器人位姿和行进轨迹修正方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述视觉传感器包括以下至少之一:
3.根据权利要求1所述的方法,其特征在于,对各幅图像对应的一个或多个连续线条进行筛选包括:
4.根据权利要求1所述的方法,其特征在于,在获取满足预定条件的连续线条作为预切割轨迹之后,还包括:
5.根据权利要求1或4所述的方法,其特征在于,在获取满足预定条件的连续线条作为预切割轨迹之后,还包括:
6.一种机器人位姿和行进轨迹修正装置,其特征在于,包括:
7.根据权利要求6所述的装置,其特征在于,还包括:
8.根据权利要求6所述的装置,其特征在于,还包括:
9.一种机器人,其特征在于,包括:视觉传感器、存储器及处理器,其特征在于,
10.根据权利要求9所述的机器人,其特征在于,所述视觉传感器包括以下至少之一:
技术总结
本发明公开了一种机器人位姿和行进轨迹修正方法、装置及机器人,上述方法包括:使用视觉传感器采集地面信息,获取多幅图像及每一幅图像对应的机器人位姿数据;对于获取到的每一幅图像,提取该图像的梯度信息,将梯度幅值大于预设梯度阈值的梯度信息拟合出一个或多个连续线条;对各幅图像对应的一个或多个连续线条进行筛选;根据每一幅图像对应的机器人位姿数据,将各幅图像经筛选后保留的一个或多个连续线条进行拟合;根据获取的预切割轨迹确定机器人偏离导航规划路径的情况下,对机器人位姿以及机器人的当前行进轨迹进行修正。采用上述方案,可以实现机器人对割草的自动化、智能化检测,避免机器人漏割或者机器人移动至割草区域范围外。
技术研发人员:闫东坤,仇丽茹,王帅帅,刘梓文,方万元
受保护的技术使用者:北京盈迪曼德科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!