一种通用柔性机械手的制作方法
本发明涉及机械手,具体涉及一种通用柔性机械手。
背景技术:
1、机器人手爪是机器人末端执行装置之一,其功能决定了机器人能完成的工作,是机器人实现各种任务的重要工具,随着机器人应用领域的不断扩大和深入,机器人手爪的发展也呈现出多样化和个性化的趋势。其中,机器人手爪可分为刚性机械手和柔性结构手,不过各自都存在一些缺点,刚性机械手末端的刚性夹持结构直接与目标物体接触,所以刚性较大、柔性差,在实际工作应用中,难以保证被抓取的目标物体没有损伤、尤其是在抓取一些柔软易碎品时,往往会破坏其结构,因此只适合抓取一些硬质的物体,不适合进行精密操作,而柔性机械手往往具有柔性大而刚性不足的缺点,尺度较小的柔性机械手难以承受较大负载,不适合抓取尺寸和质量较大的物体,尺度较大的柔性机械手由于柔度大而难以捏取较小的物体。由此可见,现有技术还存在一些缺陷,有必要对上述问题进行改进。
技术实现思路
1、有鉴于此,有必要针对上述的问题,提供一种通用柔性机械手。
2、为实现上述目的,本发明采取以下的技术方案:
3、一种通用柔性机械手,包括:
4、一机械手基台;
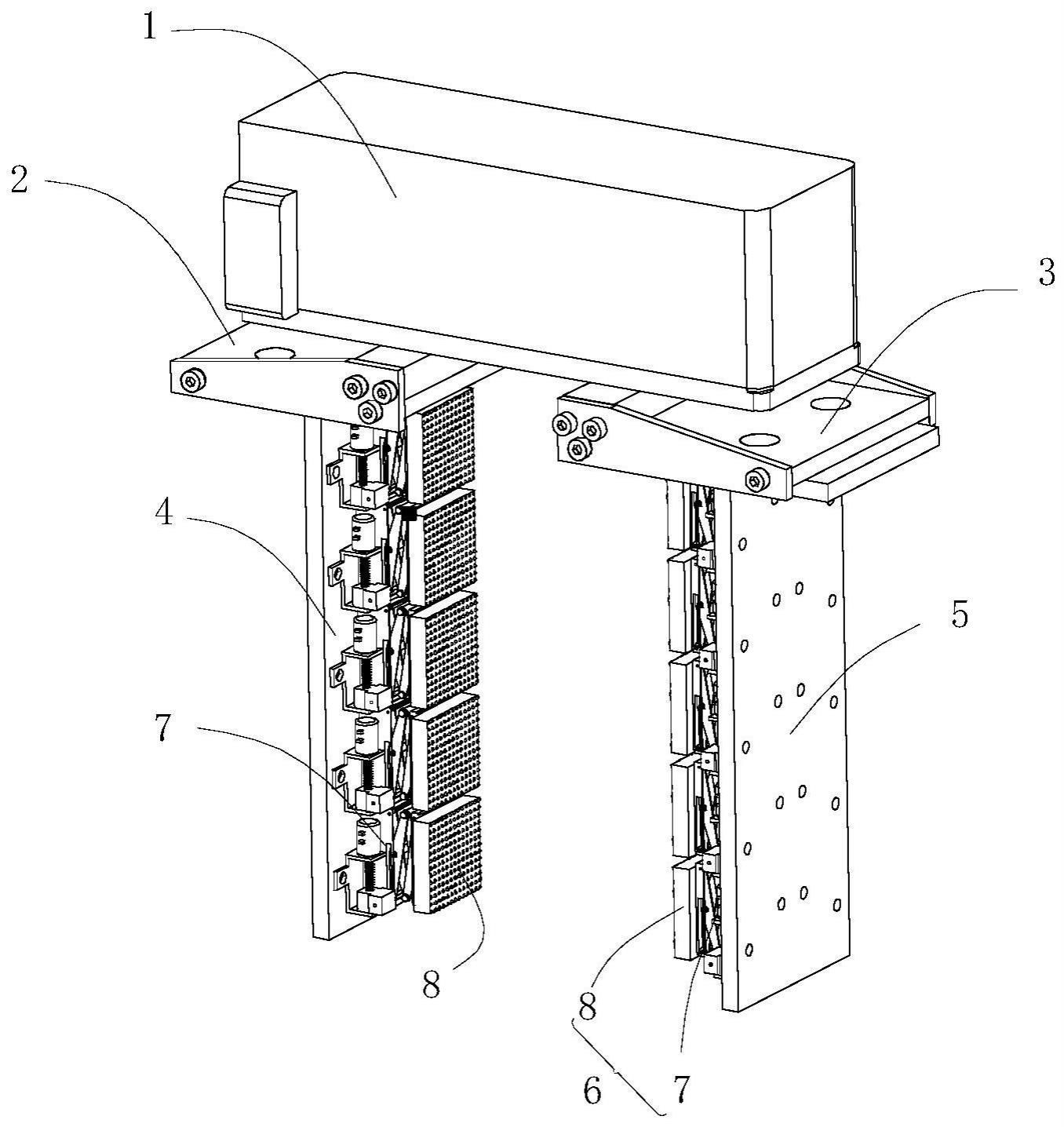
5、所述机械手基台包括有左移动滑台和右移动滑台,左移动滑台和右移动滑台可相向移动或者相背移动;
6、所述左移动滑台下方设置有一左底板,所述右移动滑台下方设置有一右底板;
7、所述左底板上设置有多个夹持组件,右底板上亦设置有多个夹持组件,左底板上的夹持组件与右底板上的夹持组件相对设置;
8、所述夹持组件包括伸缩机构以及由伸缩机构带动的柔性体;
9、所述左底板的柔性体与右底板的柔性体在伸缩机构的带动下可相向移动,进而夹持目标物体,或者,左底板的柔性体与右底板的柔性体在伸缩机构的带动下可相背移动,进而松开夹持目标物体。
10、进一步的,
11、所述机械手基台包括基台基板;
12、所述基台基板设置有一圆柱导轨,圆柱导轨上套设有两直线轴承,一直线轴承与左移动滑台相连,另一直线轴承与右移动滑台相连;
13、所述基台基板上设置有驱动电机,基台基板设置有两轴承座,一传动丝杆的两端与两轴承座一一对应且旋转连接;
14、所述传动丝杆上包括有一正旋螺纹部和一反旋螺纹部;
15、所述传动丝杆的正旋螺纹部套设有一正旋方形丝杆螺母,传动丝杆的反旋螺纹部套设有一反旋方形丝杆螺母,正旋方形丝杆螺母与左移动滑台相连,反旋方形丝杆螺母与右移动滑台相连;
16、所述驱动电机的驱动轴套设有一传动齿轮;
17、所述传动齿轮与一输入齿轮啮合连接,输入齿轮与传动丝杆相连。
18、进一步的,
19、所述左移动滑台包括第一左连接台和第二左连接台,第一左连接台与正旋方形丝杆螺母相连,第二左连接台用于与左底板相连。
20、进一步的,
21、所述右移动滑台包括第一右连接台和第二右连接台,第一右连接台与反旋方形丝杆螺母相连,第二右连接台用于与右底板相连。
22、进一步的,
23、所机械手基台上设置有防尘外壳。
24、进一步的,
25、所述左底板上设置有五个夹持组件,五个夹持组件沿左底板高度方向间隔设置,右底板上亦设置有五个夹持组件,五个夹持组件沿右底板高度方向间隔设置,左底板上的五个夹持组件与右底板上的五个夹持组件一一对应且相对设置。
26、进一步的,
27、所述伸缩机构包括伸缩组件和驱动组件,所述伸缩组件包括固定台、支架组件和升降台;
28、所述固定台用于设置于左底板或者右底板上,以实现伸缩机构与左底板或者右底板相连;
29、所述升降台用于承托柔性体;
30、所述支架组件包括第一左剪叉支撑臂、第二左剪叉支撑臂、第三左剪叉支撑臂、第四左剪叉支撑臂、第一右剪叉支撑臂、第二右剪叉支撑臂、第三右剪叉支撑臂和第四右剪叉支撑臂;
31、第一左剪叉支撑臂与第二左剪叉支撑臂交叉设置且第一左剪叉支撑臂的中部与第二左剪叉支撑臂的中部铰接,第三左剪叉支撑臂与第四左剪叉支撑臂交叉设置且第三左剪叉支撑臂的中部与第四左剪叉支撑臂的中部铰接,第一左剪叉支撑臂的一端与固定台铰接,第一左剪叉支撑臂的另一端与第四左剪叉支撑臂的一端铰接,第四剪叉支撑臂的另一端与升降台铰接,第二左剪叉支撑臂的一端与第三左剪叉支撑臂的一端铰接;
32、第一右叉支撑臂与第二右剪叉支撑臂交叉设置且第一右剪叉支撑臂的中部与第二右剪叉支撑臂的中部铰接,第三右剪叉支撑臂与第四右剪叉支撑臂交叉设置且第三右剪叉支撑臂的中部与第四右剪叉支撑臂的中部铰接,第一右剪叉支撑臂的一端与固定台铰接,第一右剪叉支撑臂的另一端与第四右剪叉支撑臂的一端铰接,第四右剪叉支撑臂的另一端与升降台铰接,第二右剪叉支撑臂的一端与第三右剪叉支撑臂的一端铰接;
33、第二左剪叉支撑臂的另一端与第二右剪叉支撑臂的另一端同时穿设有第一移动滑杆,第三左剪叉支撑臂的另一端与第三右剪叉支撑臂的另一端时穿设有第二移动滑杆;
34、所述第一移动滑杆设置于固定台设置有的第一通槽内,所述第二移动滑杆设置于升降台设置有的第二通槽内。
35、进一步的,
36、所述驱动组件包括有两组驱动子组件,所述驱动子组件包括u形支撑座,一驱动丝杆的两端与u形支撑座的两端一一对应且旋转连接,驱动丝杆套设有驱动螺母,驱动螺母上设置有移动滑块,驱动丝杆的一端与一移动电机的驱动轴相连,两所述驱动子组件的移动滑块均与第一移动滑杆相连。
37、进一步的,
38、所述柔性体材质为硅橡胶,柔性体是厚度为0.5mm,边长为25mm的正方体。
39、进一步的,
40、所述柔性体的表面均匀布置有多个半圆球状凸起,相邻半圆球状凸起的间距为1mm,半圆球状凸起的球体半径为0.5mm。
41、本发明的有益效果为:
42、本发明采用左移动滑台和右移动滑台,左移动滑台和右移动滑台可相向移动或者相背移动,通过机器视觉对物体轮廓进行初步定位,然后控制左移动滑台和右移动滑台进行适当的收缩移动,使得目标物体进入机械手的抓取范围内,左移动滑台下方设置有一左底板,右移动滑台下方设置有一右底板;左底板上设置有多个夹持组件,右底板上亦设置有多个夹持组件,夹持组件包括设置于底板上的伸缩机构以及由伸缩机构带动的柔性体,左底板的柔性体与右底板的柔性体在伸缩机构的带动下可相向移动,即通过伸缩机构产生的夹持力并借助柔性体对物体进行实现夹取,本发明机械手即具有一定的柔性,又要有较好的承载能力。
技术特征:
1.一种通用柔性机械手,其特征在于,包括:
2.根据权利要求1所述的柔性机械手,其特征在于,
3.根据权利要求2所述的柔性机械手,其特征在于,所述左移动滑台包括第一左连接台和第二左连接台,第一左连接台与正旋方形丝杆螺母相连,第二左连接台用于与左底板相连。
4.根据权利要求2所述的柔性机械手,其特征在于,所述右移动滑台包括第一右连接台和第二右连接台,第一右连接台与反旋方形丝杆螺母相连,第二右连接台用于与右底板相连。
5.根据权利要求2所述的柔性机械手,其特征在于,所机械手基台上设置有防尘外壳。
6.根据权利要求1所述的柔性机械手,其特征在于,所述左底板上设置有五个夹持组件,五个夹持组件沿左底板高度方向间隔设置,右底板上亦设置有五个夹持组件,五个夹持组件沿右底板高度方向间隔设置,左底板上的五个夹持组件与右底板上的五个夹持组件一一对应且相对设置。
7.根据权利要求1所述的柔性机械手,其特征在于,所述伸缩机构包括伸缩组件和驱动组件,所述伸缩组件包括固定台、支架组件和升降台;
8.根据权利要求7所述的柔性机械手,其特征在于,所述驱动组件包括有两组驱动子组件,所述驱动子组件包括u形支撑座,一驱动丝杆的两端与u形支撑座的两端一一对应且旋转连接,驱动丝杆套设有驱动螺母,驱动螺母上设置有移动滑块,驱动丝杆的一端与一移动电机的驱动轴相连,两所述驱动子组件的移动滑块均与第一移动滑杆相连。
9.根据权利要求1所述的柔性机械手,其特征在于,所述柔性体材质为硅橡胶,柔性体是厚度为0.5mm,边长为25mm的正方体。
10.根据权利要求1所述的柔性机械手,其特征在于,所述柔性体的表面均匀布置有多个半圆球状凸起,相邻半圆球状凸起的间距为1mm,半圆球状凸起的球体半径为0.5mm。
技术总结
本发明涉及一种通用柔性机械手,本发明采用左移动滑台和右移动滑台,左移动滑台和右移动滑台可相向移动或者相背移动,通过机器视觉对物体轮廓进行初步定位,然后控制左移动滑台和右移动滑台进行适当的收缩移动,使得目标物体进入机械手的抓取范围内,左移动滑台下方设置有一左底板,右移动滑台下方设置有一右底板;左底板上设置有多个夹持组件,右底板上亦设置有多个夹持组件,夹持组件包括设置于底板上的伸缩机构以及由伸缩机构带动的柔性体,左底板的柔性体与右底板的柔性体在伸缩机构的带动下可相向移动,即通过伸缩机构产生的夹持力并借助柔性体对物体进行实现夹取,本发明机械手即具有一定的柔性,又要有较好的承载能力。
技术研发人员:黄祖成,袁海,王卫军,王昕彤
受保护的技术使用者:广州先进技术研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!