一种可调节的机器人机械手
本发明涉及机械手,具体是一种可调节的机器人机械手。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
2、1、如中国专利公开了一种可调节的机器人机械手(公开号:cn108748083a),包括稳定底座,所述稳定底座的底端外表面靠近边角处固定安装有滑轮。该可调节的机器人机械手,通过液压箱、液压管、推进电机、一号转轴、一号机械臂、二号转轴、二号机械臂、一号伸缩臂和二号伸缩臂的配合,使一号机械臂和二号机械臂在一号转轴和二号转轴的转动下能够调节角度,方便使用者对工件进行抓取,钢球能够减少运动部件之间不必要的磨损,保证抓取精度,通过电动机、机械爪、旋转盘、齿轮盘、齿面和齿轮的配合,使齿轮盘带动旋转盘旋转,使机械爪转动,方便机械爪根据实际抓取情况调整角度,使用更加灵活。
3、2、一种可调节的机器人机械手(公开号:cn115284306a),包括托举组件、舵盘、夹爪、铰接、限定卡盘、移动座和滑动调件,两个夹爪贯穿滑动调件伸入移动座内部,两个夹爪的端部会通过铰接连接在舵盘的两端,舵盘通过铰接带动两个夹爪向内或者向外移动,根据物件的大小来对两个夹爪之间的间距进行调整,两个夹爪在调整到一定位置后,通过限定卡盘对舵盘的位置进行限制,使得两个夹爪可以稳定卡在调整后的位置上,再通过托举组件配合夹爪对物件的底部进行托举,有效对物件进行稳定夹取。
4、在工厂生产加工的过程中,需要使用机械手对工件进行移动,但是现有的机械手不便于对夹具进行更换,在运输不同大小的工件时,需要使用到不同的夹具,现有的机械手夹具更换时较为繁琐,因此会降低工作效率。
5、因此,本领域技术人员提供了一种可调节的机器人机械手,以解决上述背景技术中提出的问题。
技术实现思路
1、本发明的目的在于提供一种可调节的机器人机械手,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种可调节的机器人机械手,所述底板的顶部固定安装有机械手本体,所述机械手本体的顶部通过转轴活动连接有机械上臂,所述l型板的前侧固定安装有机械夹板,所述l型板的右侧开设有第三插槽;
4、所述机械上臂的顶部设置有拆卸机构,所述拆卸机构包括第一空腔、第二空腔、第三空腔和第一横板,所述第一空腔开设于机械上臂内表面的右侧,所述第二空腔开设于机械上臂内表面的中端,所述l型板插接于第二空腔的内腔中,所述第三空腔开设于机械上臂内表面的左侧,所述第一横板滑动连接于第一空腔的内腔中,所述第一横板左侧的中端固定安装有第一插杆,所述第一插杆远离第一横板的一端贯穿第一空腔的内腔并延伸至第三插槽的内腔中,所述第一横板左侧的前后两侧均固定安装有第二插杆,所述第二插杆远离第一横板的一端贯穿第一空腔的内腔并通过第二插槽的内腔延伸至第三空腔的内腔中,所述第二插杆远离第一横板的一端固定安装有第二横板,所述第二横板的右侧固定安装有弹簧,所述弹簧远离第二横板的一端固定连接于第三空腔的右侧。
5、优选地,所述第三空腔的前后两侧均开设有滑槽,所述第二横板滑动连接于滑槽的内腔中。
6、优选地,所述第一空腔的左侧开设有第一插槽,且第一空腔通过第一插槽与第二空腔相连接。
7、优选地,所述第一横板的右侧固定安装有握把,所述握把的表面套设有保护套。
8、优选地,所述机械夹板的内侧粘接有防护垫,且防护垫的材质为海绵。
9、优选地,所述底板的四侧均固定安装有固定板,所述固定板的底部固定安装有电动伸缩腿,所述电动伸缩腿的输出端连接有垫板。
10、优选地,所述底板底部的四周均固定安装有u型板,所述u型板的内侧通过转轴活动连接有移动轮,所述移动轮采用轮毂电机。
11、优选地,所述机械手本体包括固定座、转动电机、转动座、第一铰接臂和第二铰接臂,所述转动电机安装在固定座内,所述转动电机的输出端连接于转动座,所述转动座通过第一伺服电机与第一铰接臂铰接,所述第一铰接臂通过第二伺服电机与第二铰接臂铰接,所述第二铰接臂通过第三伺服电机与机械手上臂铰接,所述机械手上臂设置有摄像头和红外探头。
12、优选地,所述机械夹板包括固定板、固定夹、移动夹、夹持电机和丝杆,所述固定夹固定在固定板一端,所述丝杆设置在固定板内,所述夹持电机的输出端固定丝杆,所述移动夹螺纹套装在丝杆外。
13、优选地,所述固定板设置有用于移动夹导向移动的导向槽。
14、与现有技术相比,本发明的有益效果是:
15、1、本发明通过向机械上臂的右侧拉动握把,使握把带动第一横板向机械上臂的右侧进行移动,随后第一横板带动第二插杆沿着第二插槽的内腔向右侧进行移动,带动第一插杆沿着第一插槽的内腔向右侧移动,从而使得第一插杆从第三插槽的内腔中移出,解除对l型板的固定,此时通过向上提拉l型板完成对l型板与机械夹板的拆卸工作。
16、2、本发明通过设置滑槽,可以对第二横板进行限位,避免第二横板在移动时产生偏移,通过设置第一插槽,可以第一插杆移动时进行限位作用,通过设置保护套,可以提高人们抓握握把时手部的舒适性,通过设置防护垫,可以在抓取物料时对物料起到防护效果。
17、3、本发明的机械上臂设置有摄像头和红外探头,便于机械夹板抓取物件时,准确识别出物件位置,提高工作效率。
18、4、本发明的机械手本体设置转动座、第一铰接臂和第二铰接臂,多机械臂可使得机械夹板多角度多方位对物件进行抓取。
技术特征:
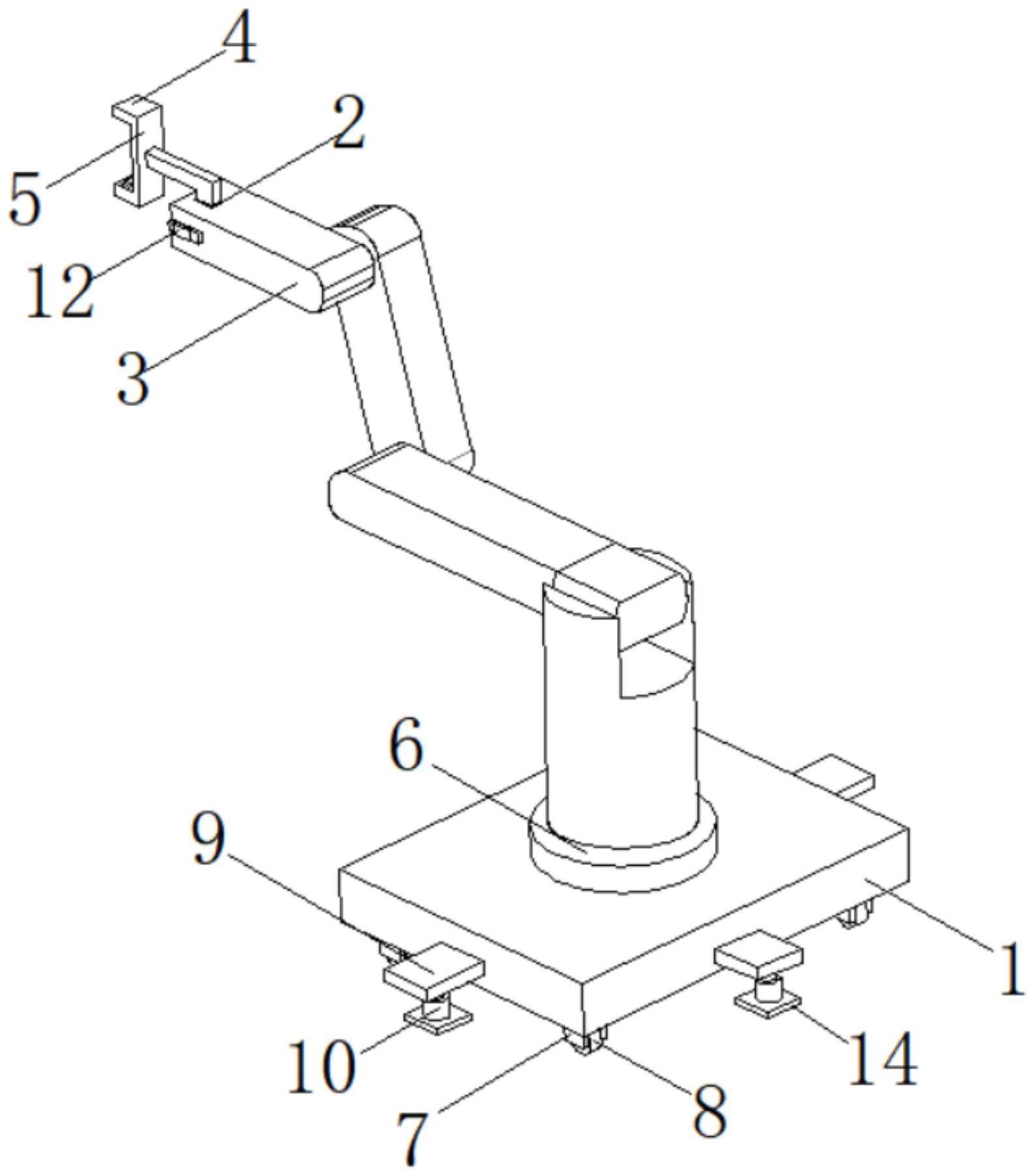
1.一种可调节的机器人机械手,包括底板(1)和l型板(4),其特征在于:所述底板(1)的顶部固定安装有机械手本体(6),所述机械手本体(6)的顶部通过转轴活动连接有机械手上臂(3),所述l型板(4)的前侧固定安装有机械夹板(5),所述l型板(4)的右侧开设有第三插槽(13);
2.如权利要求1所述的一种可调节的机器人机械手,其特征在于:所述第三空腔(203)的前后两侧均开设有滑槽(211),所述第二横板(210)滑动连接于滑槽(211)的内腔中。
3.如权利要求1所述的一种可调节的机器人机械手,其特征在于:所述第一空腔(201)的左侧开设有第一插槽(206),且第一空腔(201)通过第一插槽(206)与第二空腔(202)相连接。
4.如权利要求1所述的一种可调节的机器人机械手,其特征在于:所述第一横板(204)的右侧固定安装有握把(212),所述握把(212)的表面套设有保护套(12)。
5.如权利要求1所述的一种可调节的机器人机械手,其特征在于:所述机械夹板(5)的内侧粘接有防护垫(11),且防护垫(11)的材质为海绵。
6.如权利要求1所述的一种可调节的机器人机械手,其特征在于:所述底板(1)的四侧均固定安装有固定板(9),所述固定板(9)的底部固定安装有电动伸缩腿(10),所述电动伸缩腿(10)的输出端连接有垫板(14)。
7.如权利要求1所述的一种可调节的机器人机械手,其特征在于:所述底板(1)底部的四周均固定安装有u型板(7),所述u型板(7)的内侧通过转轴活动连接有移动轮(8),所述移动轮(8)采用轮毂电机。
8.如权利要求1所述的一种可调节的机器人机械手,其特征在于:所述机械手本体(6)包括固定座(601)、转动电机(602)、转动座(603)、第一铰接臂(604)和第二铰接臂(605),所述转动电机(602)安装在固定座内,所述转动电机(602)的输出端连接于转动座(603),所述转动座(603)通过第一伺服电机(606)与第一铰接臂(604)铰接,所述第一铰接臂(604)通过第二伺服电机(607)与第二铰接臂(605)铰接,所述第二铰接臂(605)通过第三伺服电机(608)与机械手上臂(3)铰接,所述机械手上臂(3)设置有摄像头(609)和红外探头(610)。
9.如权利要求8所述的一种可调节的机器人机械手,其特征在于:所述机械夹板(5)包括固定板(501)、固定夹(502)、移动夹(503)、夹持电机(504)和丝杆(505),所述固定夹(502)固定在固定板(501)一端,所述丝杆(505)设置在固定板(501)内,所述夹持电机(504)的输出端固定丝杆(505),所述移动夹(503)螺纹套装在丝杆(505)外。
10.如权利要求9所述的一种可调节的机器人机械手,其特征在于:所述固定板(501)设置有用于移动夹(503)导向移动的导向槽(506)。
技术总结
本发明公开了一种可调节的机器人机械手,底板的顶部固定安装有机械手本体,机械手本体的顶部通过转轴活动连接有机械上臂,L型板的前侧固定安装有机械夹板,L型板的右侧开设有第三插槽,机械上臂的顶部设置有拆卸机构,本发明通过向机械上臂的右侧拉动握把,使握把带动第一横板向机械上臂的右侧进行移动,随后第一横板带动第二插杆沿着第二插槽的内腔向右侧进行移动,带动第一插杆沿着第一插槽的内腔向右侧移动,从而使得第一插杆从第三插槽的内腔中移出,解除对L型板的固定,通过向上提拉L型板完成对L型板与机械夹板的拆卸工作;机械上臂设置有摄像头和红外探头,便于机械夹板抓取物件时,准确识别出物件位置,提高工作效率。
技术研发人员:卢佳园
受保护的技术使用者:重庆交通职业学院
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!