一种三自由度自适应对位平台的制作方法
本发明涉及一种自适应对位治具,特别涉及一种三自由度自适应对位平台。
背景技术:
1、在精密组装应用场景中,当前最常见的做法就是使用精密直线运动模组构建精密的三维(xyz)或四维(xyz+c)运动体系,再辅以机器视觉来实现自动化;还有一种做法是使用四轴或六轴机械手搭配机器视觉来实现自动化组装。不管是用以上哪种方案,都有明显的缺点:第一、硬件成本高昂,对于使用精密直线运动模组构建精密的三维(xyz)或四维(xyz+c)运动体系,其直线模组一般使用研磨级的滚珠丝杆搭配伺服电机组成,有的还会直接使用直线电机搭配光栅尺来构建,再加上机器视觉部分的硬件,其总的硬件成本非常高昂;第二、对于使用四轴或六轴机械手的硬件体系,一般需要高重复精度的机械手,再搭配机器视觉,其硬件成本也是很高昂;第三、设备的组装过程困难且繁琐,对于使用精密直线运动模组构建精密的三维(xyz)或四维(xyz+c)运动体系,其设备组装需要专业素养很高的技术人员打表校正精度,来确保运动体系获得高标准的运动精度;第四、设备的调试过程繁琐且困难,一般的,初次对位会非常的费事且考验设备调试人员的眼力;第五、柔性不足,产品规格切换后,一般需要重新调试设备,并且针对每个不同规格的产品要准备不同的视觉模板及坐标参数;维护困难,一般的,越是精密高结构复杂的设备其维护成本及困难度就越高。
技术实现思路
1、本发明的目的是提供一种三自由度自适应对位平台,能适合精密组装的低成本的简易自动化实现方式。
2、为实现上述目的,本发明所采用的技术方案是:
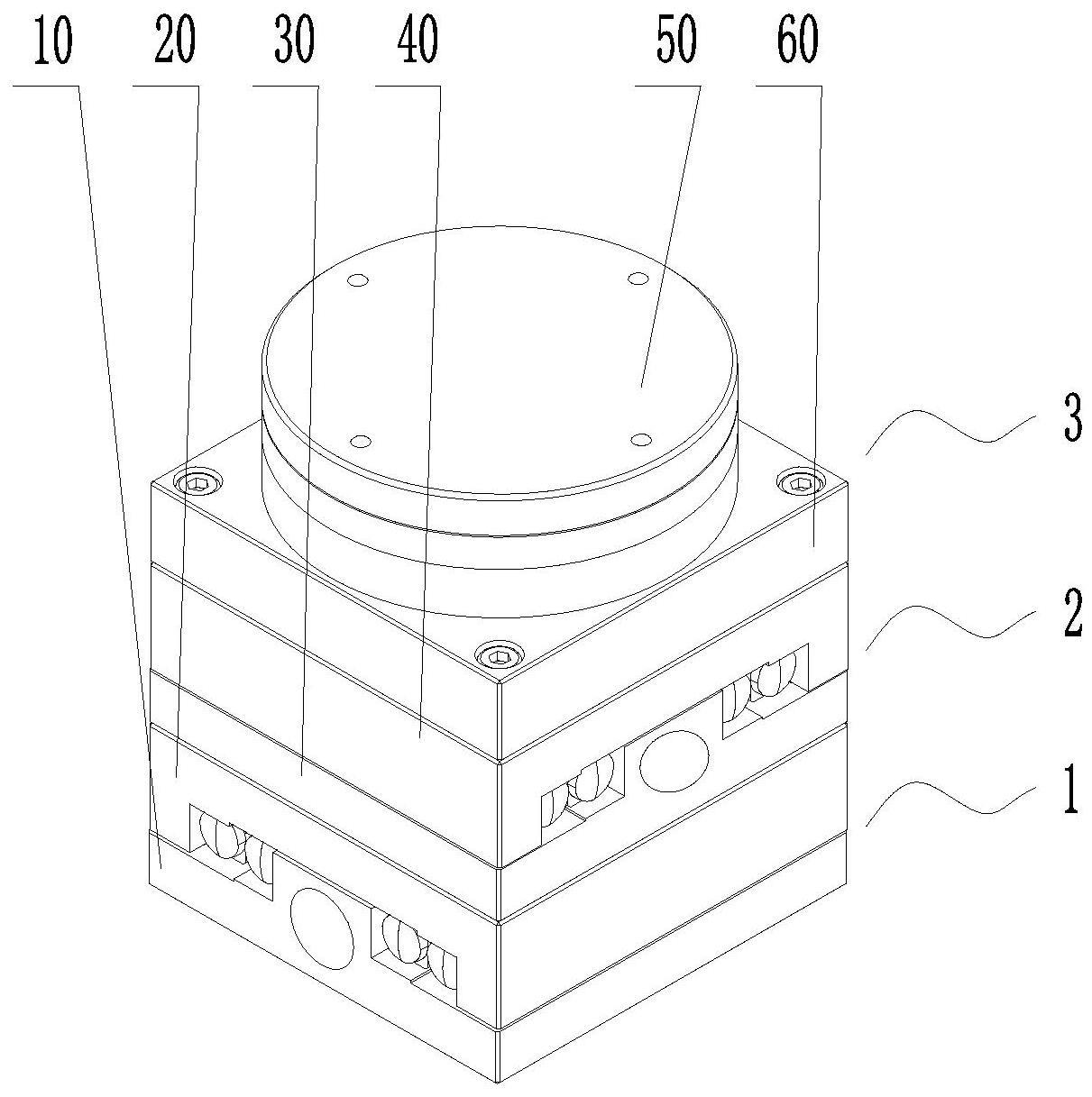
3、本发明提供一种三自由度自适应对位平台,包括:
4、第一平动调节自适应机构;
5、第二平动调节自适应机构,设置在所述第一平动调节自适应机构上;
6、转动调节自适应机构,设置在所述第二平动调节自适应机构上;
7、其中,所述第一平动调节自适应机构和所述第二平动调节自适应机构分别实现平面直线自由度的自适应调节,所述转动调节自适应机构实现平面转动自由度的自适应调节。
8、在一较佳实施例中,所述第一平动调节自适应机构包括:
9、第一底座单元;
10、第一平台单元,可滑动设置在所述第一底座单元上;
11、所述第二平动调节自适应机构包括:
12、第二底座单元,固定设置在所述第一平台单元上;
13、第二平台单元,可滑动设置在所述第二底座单元上;
14、其中,所述第一平台单元与所述第一底座单元相对滑动直线自由度与所述第二平台单元与所述第二底座单元相对滑动直线自由度成一定角度的夹角。
15、在一较佳实施例中,所述转动调节自适应机构包括:
16、第三底座单元,固定设置在所述第二平台单元上;
17、第三平台单元,可转动设置在所述第三底座单元上;
18、在一较佳实施例中,所述第一底座单元包括:
19、第一底座,中间部位腔体内设置有第一复位机构,两侧设置有第一滑动机构;
20、所述第一平台单元包括:
21、第一移动板,中间部位下部设置有与所述第一复位机构匹配连接的第一复位固定机构,两侧部位下部设置有与所述第一滑动机构固定连接的第一滑动固定机构;
22、所述第二底座单元包括:
23、第二底座,中间部位腔体内位设置有第二复位机构,两侧设置有第二滑动机构;
24、所述第二平台单元包括:
25、第二移动板,中间部位下部设置有与所述第二复位机构匹配连接的第二复位固定机构,两侧部位下部设置有与所述第二滑动机构固定连接的第二滑动固定机构。
26、在一较佳实施例中,所述第三底座单元包括:
27、第三底座,中间腔体下部设置有第三复位机构,中间腔体上部设置有转动机构;
28、所述第三平台单元包括:
29、转动板,中间柱体下端部设置有第三复位机构匹配连接的第三复位固定机构,所述中间柱体上部与所述转动机构固定连接。
30、在一较佳实施例中,所述第一复位机构包括:
31、第一复位调节块、弹性体ⅰ、弹性体ⅱ、第一复调节杆,
32、其中,所述弹性体ⅰ、所述第一复位调节块、所述弹性体ⅱ依次可滑动套在所述第一复位调节杆上设置在所述第一底座中间部位腔体内中;
33、所述第一滑动机构为交叉滚子导轨;
34、所述第一复位调节块上部设置有连接件ⅰ,所述第一复位固定机构为与所述连接件ⅰ对应匹配的连接件ⅱ;
35、所述第一滑动机构为所述交叉滚子导轨的外侧上部设置有连接件ⅲ,所述第一滑动固定机构为与所述连接件ⅲ匹配的连接件ⅳ;
36、所述第二复位机构包括:
37、第二复位调节块、弹性体ⅲ、弹性体ⅳ、第二复位调节杆,
38、其中,所述弹性体ⅲ、所述第二复调节块、所述弹性体ⅳ依次可滑动套在所述第二复位调节杆上设置在所述第二底座中间部位腔体内中;
39、所述第二滑动机构为交叉滚子导轨;
40、所述第二复位调节块上部设置有连接件ⅴ,所述第一复位固定机构为与所述连接件ⅴ对应匹配的连接件ⅵ;
41、所述第二滑动机构为所述交叉滚子导轨的外侧上部设置有连接件ⅶ,所述第一滑动固定机构为与所述连接件ⅶ匹配的连接件ⅷ。
42、在一较佳实施例中,所述第三复位机构包括:
43、弹片复位卡座;
44、所述转动机构为交叉滚子轴承;
45、所述第三复位固定机构包括:
46、第三复位调节弹片、弹片固定座,
47、所述第三复位调节弹片通过所述弹片固定座设置在所述第三转动板中间柱体下端部。
48、在一较佳实施例中,所述弹性体ⅰ、所述弹性体ⅱ、所述弹性体ⅲ、所述弹性体ⅳ均为压缩弹簧或均为拉伸弹簧。
49、在一较佳实施例中,所述弹性体ⅰ、所述弹性体ⅱ、所述弹性体ⅲ、所述弹性体ⅳ均为弹性橡胶。
50、在一较佳实施例中,所述第一底座设置第一滑动机构两侧面和所述第一移动板对应侧面分别设置有中心位置对合用刻度标志线;
51、所述第二底座设置第一滑动机构两侧面和所述第二移动板对应侧面分别设置有中心位置对合用刻度标志线;
52、所述第三底至少一侧侧面和所述转动板对应侧面分别设置有中心位置对合用刻度标志线。
技术特征:
1.一种三自由度自适应对位平台,其特征在于,包括:
2.如权利要求1所述的一种三自由度自适应对位平台,其特征在于,所述第一平动调节自适应机构包括:
3.如权利要求2所述的一种三自由度自适应对位平台,其特征在于,所述转动调节自适应机构包括:
4.如权利要求2所述的一种三自由度自适应对位平台,其特征在于,所述第一底座单元包括:
5.如权利要求3所述的一种三自由度自适应对位平台,其特征在于,所述第三底座单元包括:
6.如权利要求4所述的一种三自由度自适应对位平台,其特征在于,所述第一复位机构包括:
7.如权利要求5所述的一种三自由度自适应对位平台,其特征在于,所述第三复位机构包括:
8.如权利要求6所述的一种三自由度自适应对位平台,其特征在于,所述弹性体ⅰ、所述弹性体ⅱ、所述弹性体ⅲ、所述弹性体ⅳ均为压缩弹簧或拉伸弹簧。
9.如权利要求6所述的一种三自由度自适应对位平台,其特征在于,所述弹性体ⅰ、所述弹性体ⅱ、所述弹性体ⅲ、所述弹性体ⅳ均为弹性橡胶。
10.如权利要求4所述的一种三自由度自适应对位平台,其特征在于,所述第一底座设置第一滑动机构两侧面和所述第一移动板对应侧面分别设置有中心位置对合用刻度标志线;
技术总结
本发明公开了一种三自由度自适应对位平台,包括:第一平动调节自适应机构;第二平动调节自适应机构,设置在所述第一平动调节自适应机构上;转动调节自适应机构,设置在所述第二平动调节自适应机构上;其中,所述第一平动调节自适应机构和所述第二平动调节自适应机构分别实现平面直线自由度的自适应调节,所述转动调节自适应机构实现平面转动自由度的自适应调节。本发明提供一种三自由度自适应对位平台能适合精密组装的低成本的简易自动化实现方式。
技术研发人员:李龙
受保护的技术使用者:广东瑞创智能科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!