一种用于智能机器人的工件夹持工具的制作方法
本发明涉及机器人夹具,尤其涉及一种用于智能机器人的工件夹持工具。
背景技术:
1、在现有的智能机器中,智能机器人至少要具备以下三个要素,一是感觉要素,用来认识周围环境状态;二是运动要素,对外界做出反应性动作;三是思考要素,根据感觉要素所得到的信息,思考出采用什么样的动作,智能机器人具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触觉、嗅觉,除具有感受器外,它还有效应器,作为作用于周围环境的手段智能机器人的工件可以是各种不同类型的物体,具体取决于机器人的应用领域和任务需求,一般可能包括零部件、包装物品、原材料、食品和饮料、操作工具等等,智能机器人可以使用各种操作工具,如焊枪、钻头、刀具等,用于进行精细的加工和操作。
2、在现有的智能机器人中工件夹持工具,一般多使用机械爪,现有的机械爪有一种为四爪机械爪,四爪机械抓的结构一般包括气缸、四个爪体、四个连接杆以及连接件,气缸一般固定连接于固定盘下方,当启动气缸后,气缸将带动连接件向上运动,连接件与四个连接杆之间通过活动杆活动连接,四个连接杆分别与四个机械柱活动连接,四个连接杆还通过固定块与上方的固定盘的外侧壁活动连接,当气缸带动连接件向上移动时,通过活动杆挤压四个连接杆向下运动,当气缸不断抬升连接件时,则四个连接杆会带动爪体向中间运动,实现对物体的夹持,但在现有的对于柱状的物体夹持时,由于夹爪会夹持柱状物体的边缘,当柱状物体的外侧壁较为光滑时,可能会出现夹持不牢固的情况,且四爪机械爪由于在夹持柱状物体时,柱状物体的状态可能会平直状态或者竖直状态,而夹持竖直状态的物体时,可能会出现夹持不牢固导致物体漏出的情况,使得造成不必要的损失。
3、因此,有必要提供一种新的用于智能机器人的工件夹持工具解决上述技术问题。
技术实现思路
1、为解决由于夹爪会夹持柱状物体的边缘,当柱状物体的外侧壁较为光滑时,可能会出现夹持不牢固的情况,且四爪机械爪由于在夹持柱状物体时,柱状物体的状态可能会平直状态或者竖直状态,而夹持竖直状态的物体时,可能会出现夹持不牢固导致物体漏出的情况,使得造成不必要的损失的问题,本发明提供一种用于智能机器人的工件夹持工具。
2、本发明提供的用于智能机器人的工件夹持工具,包括固定盘,所述固定盘的侧壁环设第一夹持装置以及第二夹持装置,第一夹持装置通过第一机械柱与固定盘活动连接,第二夹持装置通过第二机械柱与固定盘固定连接,所述第一夹持装置与所述第二夹持装置结构相同,第一夹持装置与第二夹持装置均设置有连接件,两个所述连接件之间活动连接,所述固定盘的底端固定连接有气缸,所述气缸的输出端与两个连接件均固定连接,固定盘远离气缸的一端设置有活动装置,第一夹持装置与第二夹持装置之间设置有推动装置,且底部设置有伸缩组件,所述伸缩组件的一侧设置有固定板,所述固定板的远离伸缩组件的一侧设置有倾斜状;
3、所述活动装置包括驱动件、竖杆、安装板以及竖板,所述驱动件的输出端活动穿设过所述固定盘的上端,驱动件的输出端与所述竖杆的上端固定连接,竖杆远离驱动件的输出端的一端与所述安装板的上端固定连接,所述竖板设置有两块,两块竖板的一侧与安装板的上端固定连接,两块竖板远离安装板的一侧活动连接于固定盘上相对设置的两条弧形活动槽中,两块竖板接近活动槽的一侧与所述第一机械柱固定连接;
4、所述推动装置包括第一活动板、第二活动板以及推动板,所述第一活动板的一侧与第一夹持装置的一侧活动连接,第一活动板远离第一夹持装置的一侧与所述第二活动板的一侧活动连接,第二活动板远离第一活动板的一侧与所述第二夹持装置活动连接,第一活动板与第二活动板的夹角方向为向固定盘的中间位置,所述推动板设置有两块,两块推动均设置为弧形,两块推动板的一侧分别与第一活动板以及第二活动板的一侧固定连接。
5、优选的,所述第一夹持装置还包括运动组,所述运动组设置有两组。
6、优选的,所述运动组包括活动杆、两块第一连接杆以及两块第二连接杆,所述活动杆的一端与所述连接件的一侧活动连接,活动杆远离连接件的一端活动连接于两块所述第一连接杆之间,两块第一连接杆以及两块所述第二连接杆的一端均与所述伸缩组件的上端活动连接,两块第一连接杆以及两块第二连接杆远离伸缩组件的一端与所述第一机械柱的一侧活动连接。
7、优选的,两个所述连接件均为连接板,两个所述连接板的外侧壁分别与多个活动杆的一端活动连接,两个连接板的上端与所述气缸的输出端固定连接,两个连接板之间活动连接。
8、优选的,所述伸缩组件包括伸缩件、上固定箱以及下固定箱,所述上固定箱的上端与两块所述第一活动板以及两块所述第二活动板的底端均活动连接,所述伸缩件设于上固定箱的内部,伸缩件的输出端活动穿设过上固定箱的底壁,伸缩件的输出端与所述下固定箱固定连接,所述下固定箱的一侧与所述固定板的一侧固定连接。
9、优选的,所述驱动件为电机,所述电机的输出端活动穿设过固定盘的上端,电机的输出端与所述安装板的一侧固定连接。
10、优选的,所述电机的外侧壁固定连接有支撑架,所述支撑架的底端与固定盘的顶端固定连接。
11、与相关技术相比较,本发明提供的用于智能机器人的工件夹持工具具有如下有益效果:
12、1、该装置通过设置驱动件带动连接杆转动,通过连接杆带动安装板转动,而连接板的上端固定连接有两块竖板,通过竖板的移动带动第一机械柱转动,通过第一机械柱的转动使得第一机械柱与第二机械柱之间的夹角的角度发生变化,使得可以对横向放置的柱状物件以及竖向放置的柱状物件的夹持,使得整体装置的实用性更高;
13、2、该装置通过设置伸缩组件的一侧设置有固定板,所述固定板的远离伸缩组件的一侧设置有倾斜状,使得在多个固定板向中间靠拢时,可以将待夹持的柱状物件底部托起,较传统的通过夹爪对柱状物件的边缘进行夹持,在一定程度上减小了出现夹持不稳定的情况,在一定程度上防止由于夹持不稳而出现的不必要的损失;
14、3、该装置通过设置固定板以及多组伸缩组件,使得在装置运行时,通过伸缩组件向中间靠拢带动下方的固定板向中间靠拢,使得对柱状物件的固定,防止柱状物件出现偏移的情况;
15、4、该装置通过设置推动装置,使得在装置运动时,第一活动板以及第二活动板会向装置的内部运动,而第一活动板以及第二活动板的侧壁均固定连接有弧形的推动板,使得可以实现将竖向放置的柱状物件变为横向放置,在一定程度上方便后期的收集以及堆积。
技术特征:
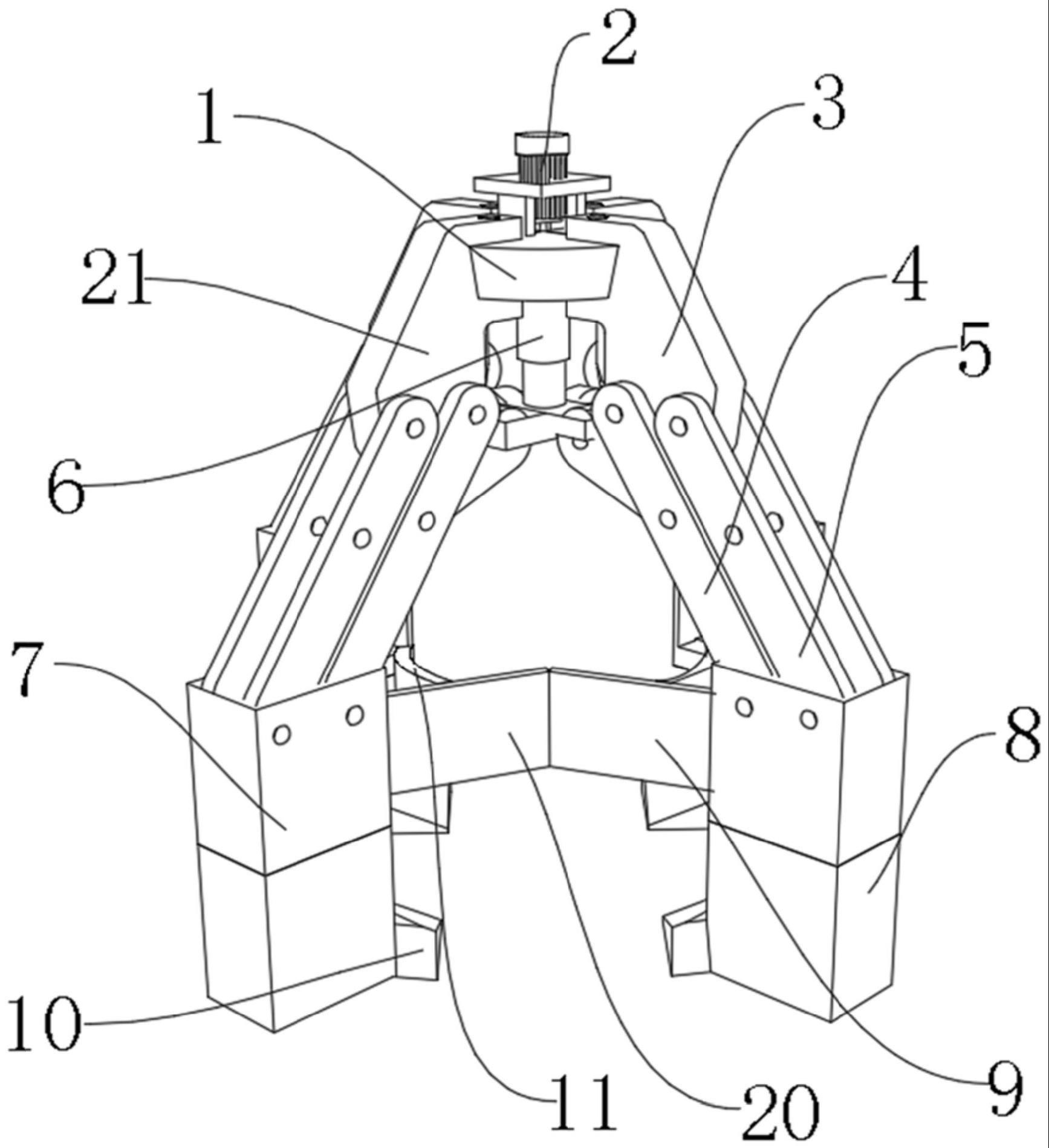
1.一种用于智能机器人的工件夹持工具,其特征在于,包括固定盘(1),所述固定盘(1)的侧壁环设第一夹持装置以及第二夹持装置,第一夹持装置通过第一机械柱(3)与固定盘(1)活动连接,第二夹持装置通过第二机械柱(21)与固定盘(1)固定连接,所述第一夹持装置与所述第二夹持装置结构相同,第一夹持装置与第二夹持装置均设置有连接件,两个所述连接件之间活动连接,所述固定盘(1)的底端固定连接有气缸(6),所述气缸(6)的输出端与两个连接件均固定连接,固定盘(1)远离气缸(6)的一端设置有活动装置,第一夹持装置与第二夹持装置之间设置有推动装置,且底部设置有伸缩组件,所述伸缩组件的一侧设置有固定板(10),所述固定板(10)的远离伸缩组件的一侧设置有倾斜状;
2.根据权利要求1所述的用于智能机器人的工件夹持工具,其特征在于,所述第一夹持装置还包括运动组,所述运动组设置有两组。
3.根据权利要求2所述的用于智能机器人的工件夹持工具,其特征在于,所述运动组包括活动杆(16)、两块第一连接杆(4)以及两块第二连接杆(5),所述活动杆(16)的一端与所述连接件的一侧活动连接,活动杆(16)远离连接件的一端活动连接于两块所述第一连接杆(4)之间,两块第一连接杆(4)以及两块所述第二连接杆(5)的一端均与所述伸缩组件的上端活动连接,两块第一连接杆(4)以及两块第二连接杆(5)远离伸缩组件的一端与所述第一机械柱(3)的一侧活动连接。
4.根据权利要求3所述的用于智能机器人的工件夹持工具,其特征在于,两个所述连接件均为连接板(15),两个所述连接板(15)的外侧壁分别与多个活动杆(16)的一端活动连接,两个连接板(15)的上端与所述气缸(6)的输出端固定连接,两个连接板(15)之间活动连接。
5.根据权利要求4所述的用于智能机器人的工件夹持工具,其特征在于,所述伸缩组件包括伸缩件(12)、上固定箱(7)以及下固定箱(8),所述上固定箱(7)的上端与两块所述第一活动板(9)以及两块所述第二活动板(20)的底端均活动连接,所述伸缩件(12)设于上固定箱(7)的内部,伸缩件(12)的输出端活动穿设过上固定箱(7)的底壁,伸缩件(12)的输出端与所述下固定箱(8)固定连接,所述下固定箱(8)的一侧与所述固定板(10)的一侧固定连接。
6.根据权利要求5所述的用于智能机器人的工件夹持工具,其特征在于,所述驱动件为电机(2),所述电机(2)的输出端活动穿设过固定盘(1)的上端,电机(2)的输出端与所述安装板(19)的一侧固定连接。
7.根据权利要求6所述的用于智能机器人的工件夹持工具,其特征在于,所述电机(2)的外侧壁固定连接有支撑架(13),所述支撑架(13)的底端与固定盘(1)的顶端固定连接。
技术总结
本发明提供一种用于智能机器人的工件夹持工具,涉及机器人夹具技术领域,包括固定盘,固定盘的侧壁环设第一夹持装置以及第二夹持装置,第一夹持装置通过第一机械柱与固定盘活动连接,第二夹持装置通过第二机械柱与固定盘固定连接,第一夹持装置与第二夹持装置结构相同,第一夹持装置与第二夹持装置均设置有连接件,两个连接件之间活动连接,固定盘的底端固定连接有气缸,气缸的输出端与两个连接件均固定连接,固定盘远离气缸的一端设置有活动装置,第一夹持装置与第二夹持装置之间设置有推动装置,且底部设置有伸缩组件,伸缩组件的一侧设置有固定板,该装置通可以对横向放置的柱状物件以及竖向放置的柱状物件的夹持,使整体装置的实用性更高。
技术研发人员:谭佳
受保护的技术使用者:谭佳
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!