一种基于无标定视觉模型的机械臂自适应容错控制方法
本发明涉及机械臂控制。具体而言,基于无标定视觉模型的机械臂自适应容错控制方法。
背景技术:
1、机器人自主能力的实现主要依赖于传感器的环境感知,而视觉传感器能够采集图像并进行分析,可以得到更多有关目标和环境的信息,且其安装方式更灵活,工作范围更大,因此应用广泛。传统视觉模型的机器人系统一般采用标定好的单目相机,但在不同的工作环境中相机的内外参数都会发生改变,为了简化操作过程,提高系统控制跟踪精度,基于无标定视觉模型的机械臂控制研究开始发展。与此同时,机械臂的系统组件常常会因各种意外情况而发生故障,轻则降低系统性能,破坏整个工作系统,重则危及人身及财产安全,导致灾难性事故。基于此,故障估计与容错控制方法的研究受到了国内外众多学者的关注。传统的故障诊断与容错控制方法大多面向的是简单系统,而针对现代复杂工业系统,传统方法存在着很大的局限性。同时面对日益增长的可靠性和安全性要求,现有的故障诊断与容错控制方法不能够完全满足工业需求。因此,研究无标定视觉模型下机械臂的容错控制算法具有重要的理论研究意义和应用价值。
技术实现思路
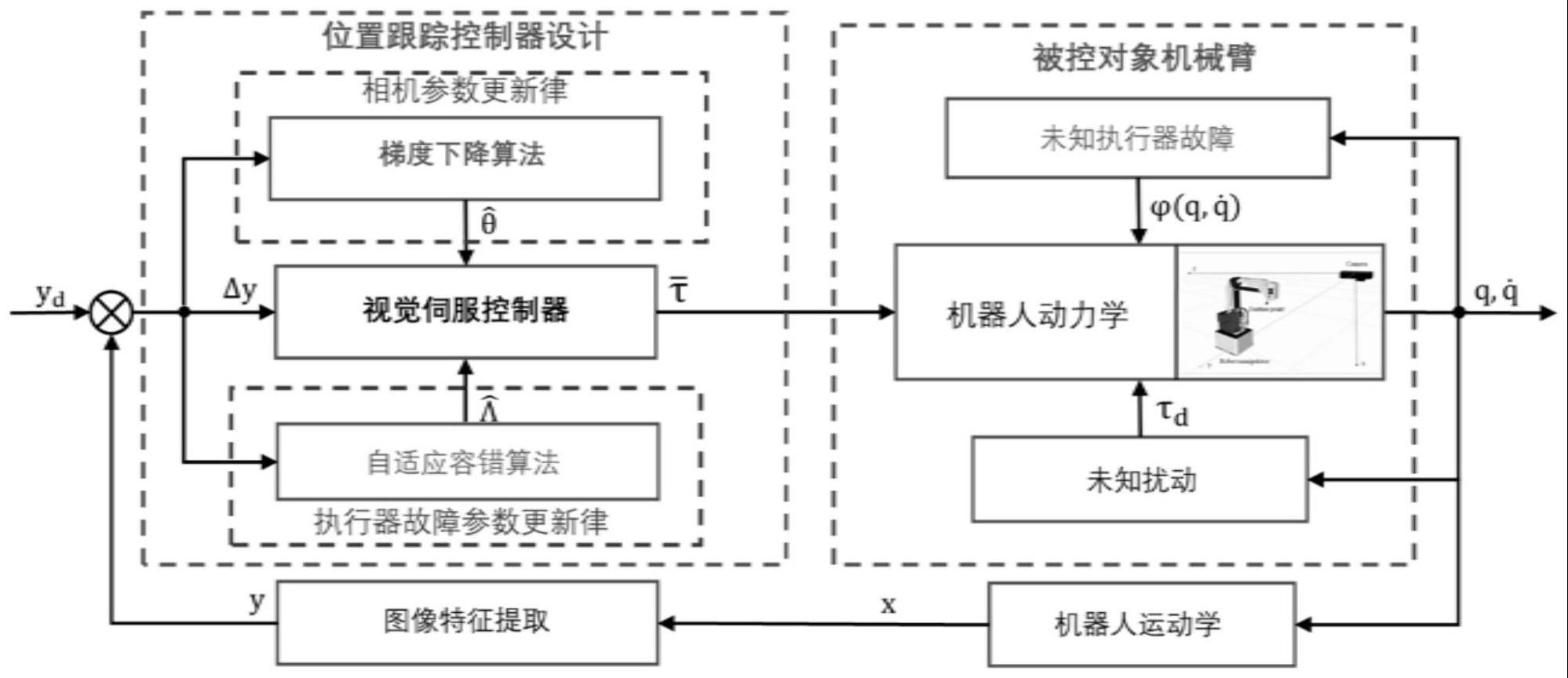
1、针对现有技术中存在的问题,本发明的目的在于提供一种基于无标定视觉模型的机械臂自适应容错控制方法,该技术方案通过在线估计机械臂受到的未知故障并将其补偿进控制力矩,抑制了执行器部分失效的影响,并设计了一种在线梯度下降最小化方法,处理了未标定相机参数的不确定性,实现了机械臂在相机图像平面的定点跟踪控制。
2、为解决上述问题,本发明采用如下的技术方案。
3、一种基于无标定视觉模型的机械臂自适应容错控制方法,控制输入及故障估计自适应律定义分别如下:
4、
5、
6、其中,g(q)表示重力项,k1是速度增益矩阵,sign()表示符号函数,ξ表示一个恒定正数,jt表示雅可比矩阵的转置,表示与深度无关的交互矩阵的估计值的转置,表示相机内外参数矩阵m的第三行向量的估计值,b表示正定矩阵;其中,x表示机械臂末端特征点在三维空间中的位置坐标,yd表示特征点在图像平面的期望位置,y表示特征点在图像平面的实际位置,δy表示特征点位置误差,q代表各关节角角度,表示各关节角的角速度,表示控制输入,表示未知执行器故障函数,τd表示未知扰动,表示相机参数的估计值,表示故障估计值。
7、2.根据权利要求1所述的一种基于无标定视觉模型的机械臂自适应容错控制方法,其特征在于:
8、无标定视觉伺服控制策略采用自适应法估计未知的相机内外参数,该自适应律表达式为:
9、
10、其中,表示相机参数的估计值,θ-1是正定对角增益矩阵θ的逆,ωt是线性化参数矩阵ω的转置,lt表示相机参数线性化矩阵l的转置,tp(p=1,2,3…,5)表示特征点运动轨迹上的五个时刻,e(tp,t)表示tp时刻与当前时刻的位置误差。
11、3.根据权利要求2所述的一种基于无标定视觉模型的机械臂自适应容错控制方法,其特征在于:
12、述无标定视觉控制算法通过选取机械臂运行轨迹上五个不同时刻的位置信息来估计相机内外参数,从而避免了相机复杂的标定过程。
13、本发明的有益效果
14、相比于现有技术,本发明的优点在于:
15、机械臂在实际应用中会突发故障,通过本发明提出的容错控制算法可以有效抑制执行器故障带来的消极影响,此外无标定视觉伺服控制方法的设计成功避免了相机复杂的标定过程。
技术特征:
1.一种基于无标定视觉模型的机械臂自适应容错控制方法,其特征在于,控制输入及故障估计自适应律定义分别如下:
2.根据权利要求1所述的一种基于无标定视觉模型的机械臂自适应容错控制方法,其特征在于:
3.根据权利要求2所述的一种基于无标定视觉模型的机械臂自适应容错控制方法,其特征在于:
技术总结
本发明公开了一种基于无标定视觉模型的机械臂自适应容错控制方法,通过在线估计机械臂受到的未知故障并将其补偿进控制力矩,抑制了执行器部分失效的影响,并设计了一种在线梯度下降最小化方法,处理了未标定相机参数的不确定性,实现了机械臂在相机图像平面的定点跟踪控制。为提高机械臂的环境适应能力,机械臂动力学方程中加入了未知执行器故障以及相机未标定带来的未知内外参数矩阵,根据设计的自适应算法在线估计未知信息,故障情况下视觉伺服机械臂系统的稳定跟踪控制性能得到了保障。该方法充分考虑了机械臂生产应用过程中面临的故障问题,具有应用范围广、控制性能良好的优点。
技术研发人员:杨亮,王琛茜,郭志军,刘大伟
受保护的技术使用者:电子科技大学中山学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!