一种具有解析正解和确定转轴的六自由度高速并联机器人
本发明涉及一种具有解析正解和确定转轴的六自由度高速并联机器人,属于机器人。
背景技术:
0、技术背景
1、随着国内工业生产中自动化程度越来越高,市场对持有更高刚度、更高稳定性的机器人的需求更为迫切。目前常见的机器人机构分为串联和并联两种。串联机构控制简单,工作空间大,但其刚度不足,而且误差是累计的。并联机构刚度大,误差不会累计,精度高、动力性能好。六自由度并联机构又被称为全自由度机器人,末端具备完备的三个移动和三个转动,被广泛的应用在分拣、装配和机械制造领域,尤其汽车、航空航天、船舶等领域的零部件大多具有复杂的曲面,六自由度机器人可以更好地满足加工、检测、焊接、打磨等曲面上加工需求。
2、中国专利(cn 115213873 a)提供了一种具有大姿态工作空间的六自由度并联机器人通过可变形的动平台实现了末端大姿态工作空间,但其机构杆件多,关节易干涉压缩了位置工作空间,并且没有确定转轴和解析正解;中国专利(cn 102962838 a)提供一种具有封闭式运动学正解的六自由度并联机构及其解析方法,机构包括静平台、动平台、6组支链组成,具有解析正解,有助于机构实现全闭环控制,通过驱动杆的伸缩可实现其动平台的六维连续运动,但其分支之间易干涉,机构的工作空间小;中国专利(cn 111267070 a)提供了一种六自由度并联机器人机构使用三支链布置实现了六自由度,具有转动能力大和工作空间大等优点,但其三个分支上均布置了移动副,在机构运行时会有磨损和噪音,不利于后期的维护,并且机构没有确定转轴;
3、现有六自由度并联机器人存在如下问题:
4、(1)采用多分支构型,杆件干涉与关节运动限制较多,工作空间受限;(2)机构没有确定转轴、运动模型复杂,缺乏解析正解或求解难度高,不宜于搭配视觉定位系统,智能化水平低;(3)动平台自转能力有限,不能实现整周回转;(4)不能同时满足分支少、工作空间大、具备较为简单的解析正解、具备确定转轴,导致实际应用中会有明显短板。
5、为克服上述机型方案的缺点,本发明提出一种具有解析正解和确定转轴的六自由度高速并联机器人,以三分支并联构型实现六自由度运动;本机器人区别于其他六自由度并联机器人的重要优点是:该技术方案所提出的三分支六自由度机构,关节限制与杆件干涉少,使末端具有较大的工作空间同时末端姿态具有确定转轴,对机构的标定、轨迹规划十分重要,分支采用平行四边形机构提高刚度,具有较为简单的运动学解析正解,不仅可以更好搭配视觉定位系统还可以进行全闭环的前馈控制,机器人具备更好的定位精度和工作效率。本发明所提出的技术方案能够同时满足分支少、工作空间大、动平台回转能力强、有确定转轴、具备较为简单的解析正解等优点,在复杂构件加工、装配分拣等领域具有良好应用前景。
技术实现思路
1、针对上述问题,本发明采用三分支并联机构构型实现六自由度运动,只需三个分支就实现了三平动和两转动,在动平台安装电机驱动末端执行器实现整周回转,实现六自由度运动,杆件少、结构紧凑、关节限制与杆件干涉少,维护简单,末端具有较大的工作空间同时末端姿态具有确定转轴,分支采用平行四边形机构提高刚度,同时具有大工作空间和解析正解,可以更好地搭配视觉定位系统,在装配、分拣、机械加工领域具有良好的应用前景。
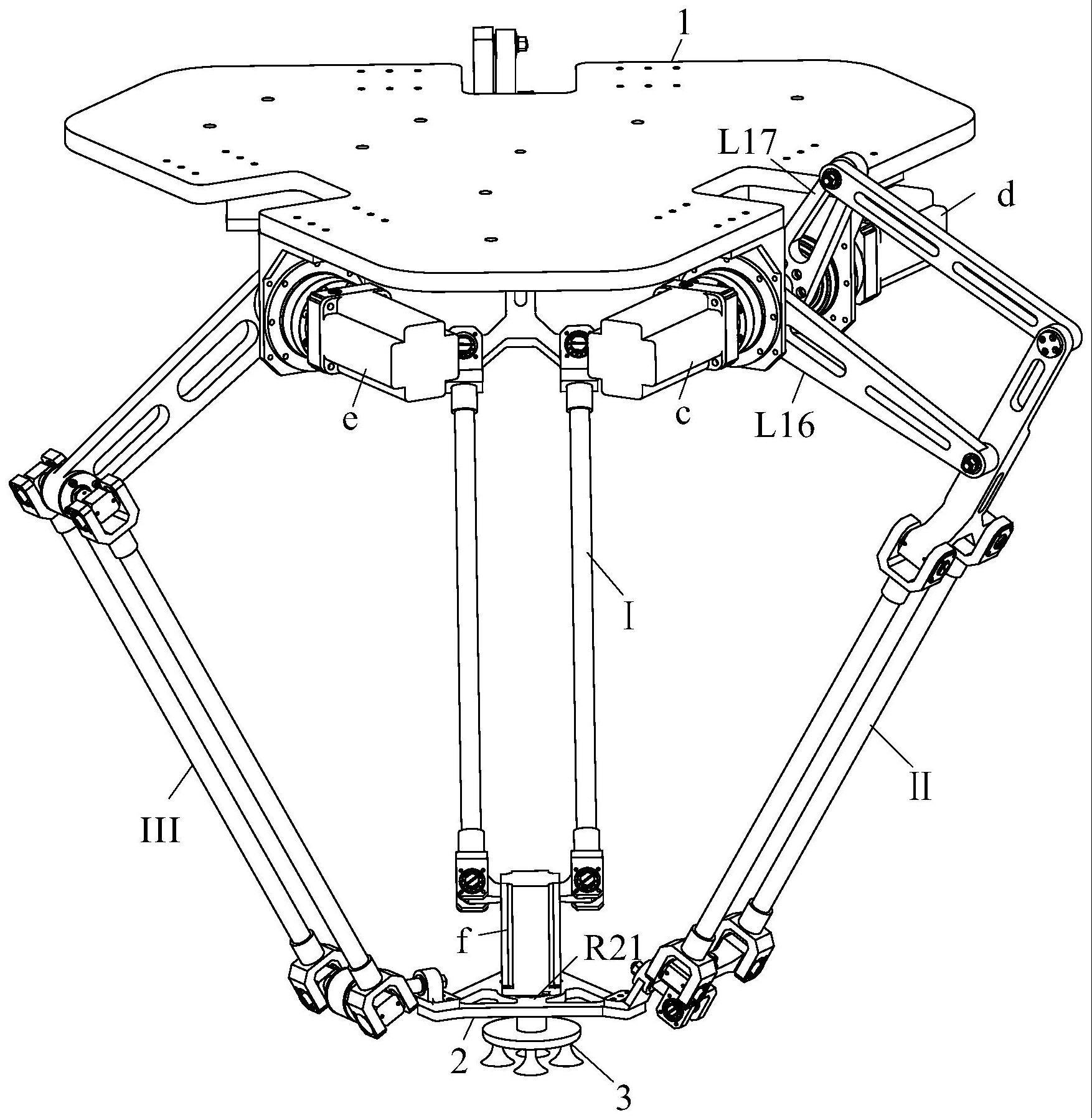
2、实现本发明目的所采用的技术方案为:一种具有解析正解和确定转轴的六自由度高速并联机器人,属于机器人技术领域;包括机架、动平台、末端执行器、六个驱动电机以及并联连接在机架与动平台之间的第一、第二、第三分支,其特征在于:第一、第二、第三分支的一端分别等间隔的连接在以所述机架上表面中心为圆心的圆周上,另一端分别等间隔的连接在以所述动平台上表面中心为圆心的圆周上,其中第一分支与第二分支结构相同;第一分支从机架到动平台顺序连接有平行四边形机构一、平行四边形机构二、u型叉、连接短轴;所述平行四边形机构一布置在机架上,平行四边形机构一的驱动长杆一通过转动副一和机架连接,平行四边形机构一的驱动短杆一通过转动副二和机架连接;平行四边形机构二和平行四边形机构一共用从动短杆;所述u型叉通过转动副十与平行四边形机构二连接,所述连接短轴通过转动副十一与u型叉连接,所述连接短轴通过转动副十二与动平台连接;所述转动副一、转动副二共线且平行于机架上下平面,平行四边形机构一所在的平面垂直于平行四边形机构二所在的平面,所述转动副十的轴线垂直于转动副一的轴线,所述转动副十一的轴线垂直并相交于转动副十的轴线;所述转动副十二轴线垂直并相交于转动副十一的轴线并且与动平台上平面呈60度夹角,转动副十、转动副十一和转动副十二轴线汇交构成复合球铰;第三分支从机架到动平台顺序连接有驱动长杆二、平行四边形机构三、连接长轴;所述驱动长杆二通过转动副十三与机架连接;所述平行四边形机构三通过转动副十四与驱动长杆二连接;所述连接长轴通过转动副十九与平行四边形机构三连接;所述连接长轴通过转动副二十与动平台连接;所述转动副十三轴线平行于机架上下平面,转动副十三、转动副十四、转动副十九轴线之间相互平行,转动副二十轴线垂直且相交于转动副十九的轴线,转动副二十轴线平行于动平台上平面;所述末端执行器通过转动副二十一与电机六连接;所述转动副二十一轴线与动平台上下平面垂直;所述机架上安装有五个电机,动平台上安装一个电机,电机一、电机二分别驱动驱动长杆一、驱动短杆一的转动,电机三、电机四分别驱动驱动长杆三和驱动短杆二的转动,电机五驱动驱动长杆二的转动,电机六驱动末端执行器实现整周回转,根据工作要求为吸盘、装配夹爪、点胶头、焊接头、主轴头等;
3、所述的一种具有解析正解和确定转轴的六自由度高速并联机器人,其特征在于该机器人的第三分支平行四边形机构三为四万向铰平行四边形机构替换为四球铰平行四边形。
4、本发明提供的有益效果为:与现有技术方案相比,本发明的机器人具有解析正解,不仅可以更好搭配视觉定位系统还可以进行全闭环的前馈控制,机器人具备更好的定位精度和工作效率;由于仅采用三分支就实现了三维移动和二维转动,结构简单紧凑、制造成本低,具有工作空间大、精度高、速度快等优点,动平台可连接包括真空吸盘、激光头、主轴头、打磨头在内的多种末端执行器,能够满足分拣、装配场景的需求并且可实现复合加工并保证工件复杂曲面的加工精度。
技术特征:
1.一种具有解析正解和确定转轴的六自由度高速并联机器人,属于机器人技术领域;包括机架、动平台、末端执行器、六个驱动电机以及并联连接在机架与动平台之间的第一、第二、第三分支,其特征在于:第一、第二、第三分支的一端分别等间隔的连接在以所述机架上表面中心为圆心的圆周上,另一端分别等间隔的连接在以所述动平台上表面中心为圆心的圆周上,其中第一分支与第二分支结构相同;第一分支从机架到动平台顺序连接有平行四边形机构一、平行四边形机构二、u型叉、连接短轴;所述平行四边形机构一布置在机架上,平行四边形机构一的驱动长杆一通过转动副一和机架连接,平行四边形机构一的驱动短杆一通过转动副二和机架连接;平行四边形机构二和平行四边形机构一共用从动短杆;所述u型叉通过转动副十与平行四边形机构二连接,所述连接短轴通过转动副十一与u型叉连接,所述连接短轴通过转动副十二与动平台连接;所述转动副一、转动副二共线且平行于机架上下平面,平行四边形机构一所在的平面垂直于平行四边形机构二所在的平面,所述转动副十的轴线垂直于转动副一的轴线,所述转动副十一的轴线垂直并相交于转动副十的轴线;所述转动副十二轴线垂直并相交于转动副十一的轴线并且与动平台上平面呈60度夹角,转动副十、转动副十一和转动副十二轴线汇交构成复合球铰;第三分支从机架到动平台顺序连接有驱动长杆二、平行四边形机构三、连接长轴;所述驱动长杆二通过转动副十三与机架连接;所述平行四边形机构三通过转动副十四与驱动长杆二连接;所述连接长轴通过转动副十九与平行四边形机构三连接;所述连接长轴通过转动副二十与动平台连接;所述转动副十三轴线平行于机架上下平面,转动副十三、转动副十四、转动副十九轴线之间相互平行,转动副二十轴线垂直且相交于转动副十九的轴线,转动副二十轴线平行于动平台上平面;所述末端执行器通过转动副二十一与电机六连接;所述转动副二十一轴线与动平台上下平面垂直;所述机架上安装有五个电机,动平台上安装一个电机,电机一、电机二分别驱动驱动长杆一、驱动短杆一的转动,电机三、电机四分别驱动驱动长杆三和驱动短杆二的转动,电机五驱动驱动长杆二的转动,电机六驱动末端执行器在动平台上实现整周回转,根据工作要求为吸盘、装配夹爪、点胶头、焊接头、主轴头等。
2.根据权利要求1所述的一种具有解析正解和确定转轴的六自由度高速并联机器人,其特征在于该机器人的第三分支平行四边形机构三为四万向铰平行四边形机构替换为四球铰平行四边形。
技术总结
本发明涉及一种具有解析正解和确定转轴的六自由度高速并联机器人,属于机器人技术领域;包括机架、动平台、末端执行器、六个驱动电机以及并联连接在机架与动平台之间的第一、第二、第三分支;所述第一、第二分支结构完全相同,本发明采用三分支并联机构构型,只需三个分支就实现了三平动和两转动,在动平台安装电机驱动末端执行器实现整周回转,实现六自由度运动,所需杆件少、结构紧凑、维护简单,具有确定转轴,分支采用平行四边形机构提高刚度,同时具有大工作空间和解析正解,可以更好地搭配视觉定位系统,在装配、分拣、机械加工领域具有良好的应用前景。
技术研发人员:曹文熬,崔俊,闫樨霖,程鹏,丁华锋,汪天龙
受保护的技术使用者:中国地质大学(武汉)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!