用于机器人的柔性执行机械臂的制作方法
本发明属于机械臂领域,具体涉及一种用于机器人的柔性执行机械臂。
背景技术:
1、机械臂是一种由多个关节和链节组成的机器人运动机构,它可以模拟人类的手臂和手腕的运动,完成各种工业任务,如装配、喷涂、搬运、焊接等。机械臂的背景技术可以追溯到20世纪60年代,随着计算机技术和控制系统的发展,机械臂逐渐变得更加精确和灵活。
2、然而,现有的机械臂技术存在一些缺点。其中之一是机械臂的传动结构通常使用齿轮等机械传动结构完成转动动作,这种传动结构需要大量的零部件和机械连接,导致机械臂动作的响应速度较慢,结构也更加复杂。此外,这种传动结构的生产成本也较高,这使得机械臂成本昂贵,限制了它们在工业应用中的普及和应用范围。
3、因此,基于以上现有技术中的一些情况,本申请进行了进一步的设计和改进。
技术实现思路
1、针对以上现有技术中的不足,本发明提供了一种用于机器人的柔性执行机械臂,控制灵活,响应灵敏,且结构简单,生产成本相比传统齿轮驱动的执行机械臂大大降低。
2、为了解决上述技术问题,本发明通过下述技术方案得以解决。
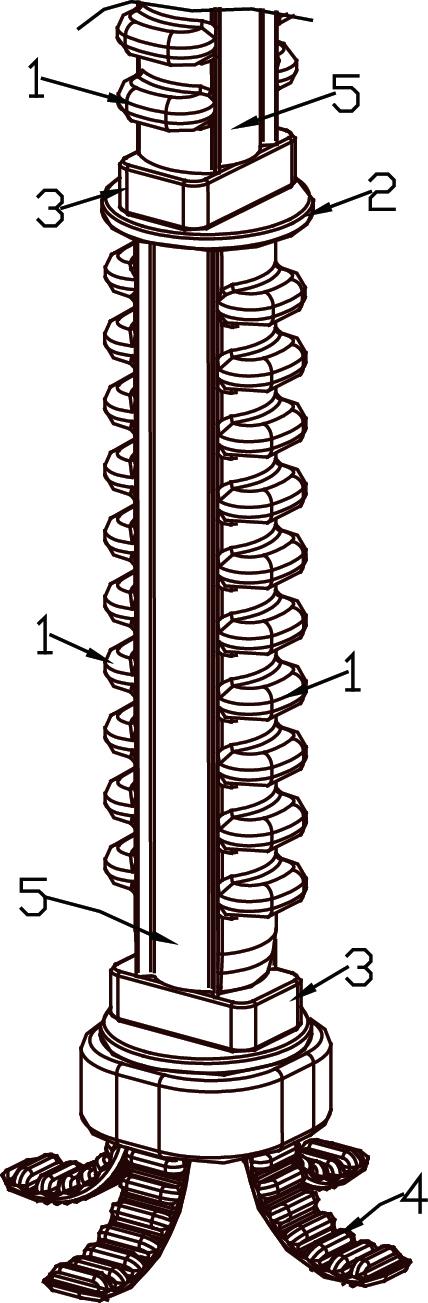
3、一种用于机器人的柔性执行机械臂,包括至少一组柔性杆和间隔板,所述间隔板位于柔性杆的端部。
4、所述柔性杆中间设置有连通整个柔性执行机械臂的软管,并贴合软管设置有至少一组柔性变形组。所述柔性变形组包括两个关于软管对称设置的柔性变形件。通过调节柔性变形件的变形程度,控制柔性执行机械臂进行弯曲,以达到执行机械臂在设定范围内移动的目的,相比传统齿轮驱动的执行机械臂在结构上更为简单,且更为灵活。
5、作为本申请所述一种用于机器人的柔性执行机械臂的优选实施方案,具体地,所述柔性变形件通过填充介质进行变形,结构简单,移动灵活。
6、作为本申请所述一种用于机器人的柔性执行机械臂的优选实施方案,具体地,在同一组柔性变形组内的柔性变形件之间通过双向泵连接,有利于简化变形结构。
7、作为本申请所述一种用于机器人的柔性执行机械臂的优选实施方案,具体地,所述双向泵装配在间隔板上,有利于保持柔性执行机械臂的重心,提高控制精度。
8、作为本申请所述一种用于机器人的柔性执行机械臂的优选实施方案,具体地,所述柔性变形组的数量为两组,使得柔性执行机械臂能够在立体空间内弯曲变形,自由度更高。
9、作为本申请所述一种用于机器人的柔性执行机械臂的优选实施方案,具体地,所述柔性变形件为气囊,所述填充介质为空气,结构简单,制造成本低,适用于柔性执行机械臂长度较长,承受力较低的使用场景。
10、作为本申请所述一种用于机器人的柔性执行机械臂的优选实施方案,具体地,所述软管为金属材质,能够为柔性执行机械臂提供支撑强度,弥补柔性执行机械臂在执行抓取物体等动作时柔性变形组强度不够的问题。
11、作为本申请所述一种用于机器人的柔性执行机械臂的优选实施方案,具体地,所述柔性执行机械臂的端部装配有夹持组件,所述夹持组件包括若干柔性夹指,所述柔性夹指能够夹取小型物体。
12、作为本申请所述一种用于机器人的柔性执行机械臂的优选实施方案,具体地,所述柔性夹指通过气管外接气泵驱动,所述气管位于软管中,使得整体结构简洁。
13、与现有技术相比,本申请具有以下有益效果:控制灵活,响应灵敏,且结构简单,生产成本相比传统齿轮驱动的执行机械臂大大降低。
技术特征:
1.一种用于机器人的柔性执行机械臂,其特征在于,包括至少一组柔性杆和间隔板(2),所述间隔板(2)位于柔性杆的端部;
2.根据权利要求1所述的一种用于机器人的柔性执行机械臂,其特征在于,所述柔性变形件(1)通过填充介质进行变形。
3.根据权利要求2所述的一种用于机器人的柔性执行机械臂,其特征在于,在同一组柔性变形组内的柔性变形件(1)之间通过双向泵(3)连接。
4.根据权利要求3所述的一种用于机器人的柔性执行机械臂,其特征在于,所述双向泵(3)装配在间隔板(2)上。
5.根据权利要求1所述的一种用于机器人的柔性执行机械臂,其特征在于,所述柔性变形组的数量为两组。
6.根据权利要求1至5任一项所述的一种用于机器人的柔性执行机械臂,其特征在于,所述柔性变形件(1)为气囊,所述填充介质为空气。
7.根据权利要求1所述的一种用于机器人的柔性执行机械臂,其特征在于,所述软管(5)为金属材质。
8.根据权利要求1所述的一种用于机器人的柔性执行机械臂,其特征在于,所述柔性执行机械臂的端部装配有夹持组件,所述夹持组件包括若干柔性夹指(4)。
9.根据权利要求8所述的一种用于机器人的柔性执行机械臂,其特征在于,所述柔性夹指(4)通过气管外接气泵驱动,所述气管位于软管(5)中。
技术总结
一种用于机器人的柔性执行机械臂,包括至少一组柔性杆和间隔板,所述间隔板位于柔性杆的端部。所述柔性杆中间设置有连通整个柔性执行机械臂的软管,并贴合软管设置有至少一组柔性变形组。所述柔性变形组包括两个关于软管对称设置的柔性变形件。与现有技术相比,本申请具有以下有益效果:控制灵活,响应灵敏,且结构简单,生产成本相比传统齿轮驱动的执行机械臂大大降低。
技术研发人员:夏建敏,王晓峰,夏硕芳,李瑞东
受保护的技术使用者:浙江夏厦精密制造股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!