一种立面移动机械臂系统防倾覆检测及控制方法
本发明属于机器人,涉及立面移动机械臂检测控制方法,尤其是一种立面移动机械臂系统防倾覆检测及控制方法。
背景技术:
1、传统固定机械臂在我们日常生产生活中已经广泛应用,随着机械臂使用场景不断拓展,也带来了更复杂的任务要求;而移动机械臂的应用,进一步扩大了机械臂工作范围,提高了其环境适应能力。在现实立面工作任务场景中,经常使用爬壁机器人搭载相关任务执行机构进行作业,但受其结构本身自由度的限制,爬壁机器人的工作效率以及任务适应能力较低,特别是在一些障碍物较多或者范围较大的工作环境下,传统爬壁机器人需要不停的变化位置来实现任务目标。
2、立面移动机械臂主要以爬壁机器人作为载体,搭载多自由度机械臂在立面环境下进行移动。立面移动机械臂具有多自由度机械臂的优势,不需要频繁改变爬壁机器人的位置,只需控制机械臂就可以到达任务目标点,减小了路径规划的复杂程度,而且立面移动机械臂的任务适应能力更强,只需根据任务需求,机械臂末端搭载不同的执行负载,就可以去完成相应的任务,减小了机器人的研发成本。
3、立面移动机械臂在其工作环境中受力较为复杂,其中机械臂对立面移动平台影响较大,特别是当机械臂处在极限位置时会对立面移动平台产生较大的力和力矩,如果立面移动机械臂系统承受的倾覆力矩过大,移动机械臂系统将会有发生掉落的风险,将会给现场人员和移动机械臂本身带来极大的安全隐患。因此,迫切需要对立面移动机械臂进行极限位置倾覆稳定性分析,并根据倾覆稳定性的分析结果,采用主动的防倾覆控制策略,使机械臂在极限位置时减小对立面移动平台的力矩,提高立面移动机械臂系统的稳定性。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种立面移动机械臂系统防倾覆检测及控制方法解决立面移动机械臂倾覆稳定性难以评估判断、立面移动机械臂系统难以主动进行防倾覆的问题。
2、本发明解决现有的技术问题是采取以下技术方案实现的:
3、一种立面移动机械臂系统防倾覆检测及控制方法,包括以下步骤:
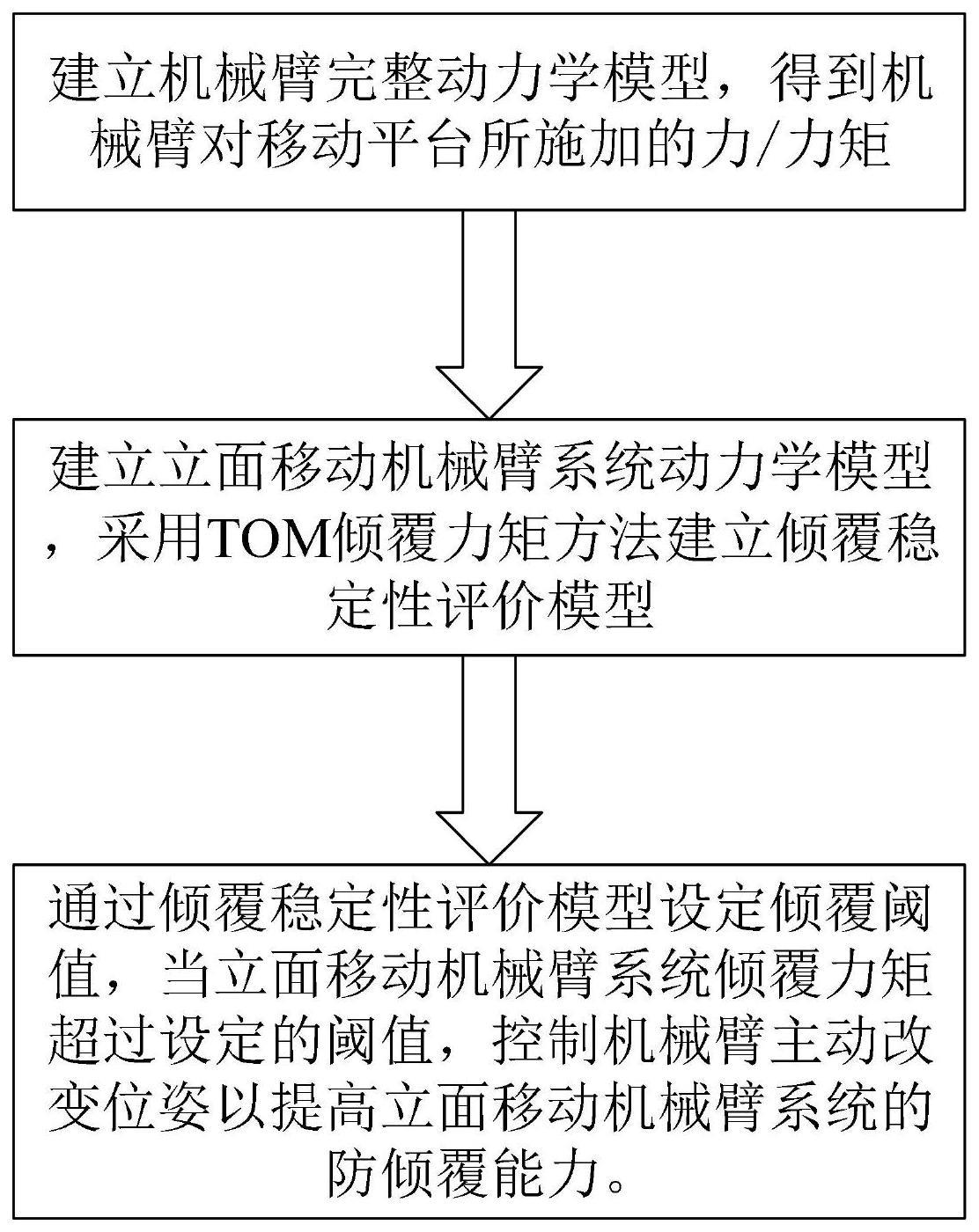
4、步骤1、建立立面坐标条件下的机械臂的动力学模型,该动力学模型用于计算机械臂对于立面移动平台的作用力和作用力矩;
5、步骤2、根据立面坐标条件下的机械臂的动力学模型,联合立面移动平台建立立面移动机械臂系统动力学模型,采用tom倾覆力矩方法建立倾覆稳定性评价模型;
6、步骤3、在立面移动平台移动过程中,通过倾覆稳定性评价模型计算立面移动机械臂系统的倾覆力矩,通过倾覆力矩判断立面移动机械臂系统的稳定性;
7、步骤4、倾覆稳定性评价模型设定倾覆阈值,如果立面移动机械臂系统的倾覆力矩超过设定的倾覆阈值,则控制系统根据主动防倾覆算法,控制机械臂主动改变位姿以提高立面移动机械臂系统的防倾覆能力。
8、进一步,所述机械臂为7轴冗余机械臂。
9、进一步,所述步骤1的具体实现方法为:通过mdh方法在机械臂关节处建立立面坐标系,得到机械臂的几何参数表;采用牛顿-欧拉法建立机械臂的动力学模型:获取机械臂本身的惯性参数,通过递推得到整个机械臂系统的动力学方程,计算机械臂系统作用于机械臂第一个连杆的作用力和作用力矩,进而得到机械臂系统对立面移动平台的作用力和作用力矩。
10、进一步,所述倾覆稳定性评价模型包括以下内容:
11、当车体处于水平线与履带边缘线平行的姿态时,立面移动机械臂系统的倾覆力矩;
12、当车体处于水平线与履带边缘线垂直的姿态时,立面移动机械臂系统的倾覆力矩;
13、当车体处于水平线与履带边缘线相交不垂直的姿态时,且立面移动机械臂绕着左下方边缘发生倾覆时,立面移动机械臂系统的倾覆力矩;
14、当车体处于水平线与履带边缘线相交不垂直的姿态时,且立面移动机械臂绕着右下方边缘发生倾覆时,立面移动机械臂系统的倾覆力矩。
15、进一步,所述步骤3判断立面移动机械臂系统防倾覆的稳定性的方法为:如果倾覆力矩tom>0,则立面移动机械臂系统将会发生倾覆;如果倾覆力矩tom<0,则立面移动机械臂系统是稳定的。
16、进一步,当立面移动机械臂系统有发生倾覆风险时,使用车载惯性测量单元读取立面移动平台的两个姿态角度,根据两个姿态角度的相对大小关系,判断出立面移动机械臂系统将会发生倾覆的方向。
17、进一步,所述步骤4的主动防倾覆算法为:当立面移动机械臂系统倾覆力矩大于倾覆阈值后,机械臂向对立面移动平台的力和力矩减小的位姿移动一个时间周期,并读取储存机械臂各关节位置、关节速度和关节加速度参数,将倾覆力矩评价模型中对应的参数进行更新,重复上述循环,直到立面移动机械臂系统倾覆力矩小于设定的阈值。
18、本发明的优点和积极效果是:
19、本发明根据机械臂的动力学模型及立面移动平台建立立面移动机械臂系统动力学模型,采用tom倾覆力矩方法建立倾覆稳定性评价模型,通过倾覆力矩判断立面移动机械臂系统防倾覆的稳定性,从而准确地判断出立面移动机械臂系统倾覆的可能性以及倾覆的方向,使得整个立面移动机械臂系统可以较早地判断倾覆风险,并根据主动防倾覆算法,控制机械臂主动改变位姿,实现了机械臂主动改变自身位置姿态来降低系统倾覆风险,有效地提升了立面移动机械臂系统的倾覆稳定性,提高了系统的环境适应能力;解决立面移动机械臂倾覆稳定性难以评估判断、立面移动机械臂系统难以主动进行防倾覆的问题,可广泛用于爬壁机器人领域。
技术特征:
1.一种立面移动机械臂系统防倾覆检测及控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种立面移动机械臂系统防倾覆检测及控制方法,其特征在于:所述机械臂为7轴冗余机械臂。
3.根据权利要求1或2所述的一种立面移动机械臂系统防倾覆检测及控制方法,其特征在于:所述步骤1的具体实现方法为:通过mdh方法在机械臂关节处建立立面坐标系,得到机械臂的几何参数表;采用牛顿-欧拉法建立机械臂的动力学模型:获取机械臂本身的惯性参数,通过递推得到整个机械臂系统的动力学方程,计算机械臂系统作用于机械臂第一个连杆的作用力和作用力矩,进而得到机械臂系统对立面移动平台的作用力和作用力矩。
4.根据权利要求1或2所述的一种立面移动机械臂系统防倾覆检测及控制方法,其特征在于:所述倾覆稳定性评价模型包括以下内容:
5.根据权利要求1或2所述的一种立面移动机械臂系统防倾覆检测及控制方法,其特征在于:所述步骤3判断立面移动机械臂系统防倾覆的稳定性的方法为:如果倾覆力矩tom>0,则立面移动机械臂系统将会发生倾覆;如果倾覆力矩tom<0,则立面移动机械臂系统是稳定的。
6.根据权利要求5所述的一种立面移动机械臂系统防倾覆检测及控制方法,其特征在于:当立面移动机械臂系统有发生倾覆风险时,使用车载惯性测量单元读取立面移动平台的两个姿态角度,根据两个姿态角度的相对大小关系,判断出立面移动机械臂系统将会发生倾覆的方向。
7.根据权利要求1所述的一种立面移动机械臂系统防倾覆检测及控制方法,其特征在于:所述步骤4的主动防倾覆算法为:当立面移动机械臂系统倾覆力矩大于倾覆阈值后,机械臂向对立面移动平台的力和力矩减小的位姿移动一个时间周期,并读取储存机械臂各关节位置、关节速度和关节加速度参数,将倾覆力矩评价模型中对应的参数进行更新,重复上述循环,直到立面移动机械臂系统倾覆力矩小于设定的阈值。
技术总结
本发明涉及一种立面移动机械臂系统防倾覆检测及控制方法,其技术特点是包括建立立面坐标条件下的机械臂的动力学模型;根据机械臂的动力学模型,联合立面移动平台建立立面移动机械臂系统动力学模型,采用TOM倾覆力矩方法建立倾覆稳定性评价模型;在立面移动平台移动过程中,通过倾覆力矩判断立面移动机械臂系统防倾覆的稳定性;如果立面移动机械臂系统的倾覆力矩超过设定的倾覆阈值,控制机械臂主动改变位姿。本发明能够准确地判断出立面移动机械臂系统倾覆的可能性以及倾覆的方向,进而控制机械臂主动改变位姿,降低了系统倾覆风险,有效地提升了立面移动机械臂系统的倾覆稳定性,提高了系统的环境适应能力,可广泛用于爬壁机器人领域。
技术研发人员:孙凌宇,孙家上,贾计东,李明龙,张志文,张胜淼,梅峥
受保护的技术使用者:河北工业大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!