绳索机器人的电机与关节角度转换修正及运动学标定方法
本发明涉及绳索牵引柔性机器人的控制领域,尤其涉及一种绳索牵引柔性机器人的电机与关节角度转换修正及运动学标定方法。
背景技术:
1、不同于传统工业机器人通过电机-减速器直接驱动刚性连杆,绳索牵引柔性机器人借助电机牵引绳索并利用滑轮等机械传动结构传递力与运动,以对机器人进行驱动。引入绳索牵引的驱动方式允许电机和其他较重的机械元件布置在底座附近,使得机器人本体的质量和惯性大大减小,具有更高的负载自重比,同时结构也更加紧凑。绳索的引入也使得机器人本体自带柔性,与人交互更加安全。基于以上这些优点,绳索牵引的驱动方式被广泛用于当今的医疗机器人、协作机器人与机械手和机器人臂手一体化系统等。
2、受制于绳索材料、负载、磨损等原因,绳索通常会具有不可重复的非线性弹性特征,同时绳索通常跨越机器人的多个关节,引入复杂的摩擦,在某些情况下还会带来延迟和滞后,这些都使得绳索牵引机器人难以被准确建模。然而常规的标定方法主要针对的是刚性机器人,忽略了绳索对电机与关节角度转换关系与运动学模型的影响。因此针对绳索牵引柔性机器人,迫切需要一种考虑绳索影响的运动学标定方法以获取准确的机器人运动学模型。
3、有鉴于此,特提出本发明。
技术实现思路
1、本发明的目的是提供了一种绳索机器人的电机与关节角度转换修正及运动学标定方法,能在考虑绳索对角度转换关系以及机器人运动学影响的前提下,获取准确的绳索机器人运动学模型,进而解决现有技术中存在的上述技术问题。
2、本发明的目的是通过以下技术方案实现的:
3、一种绳索机器人的电机与关节角度转换修正及运动学标定方法,包括:
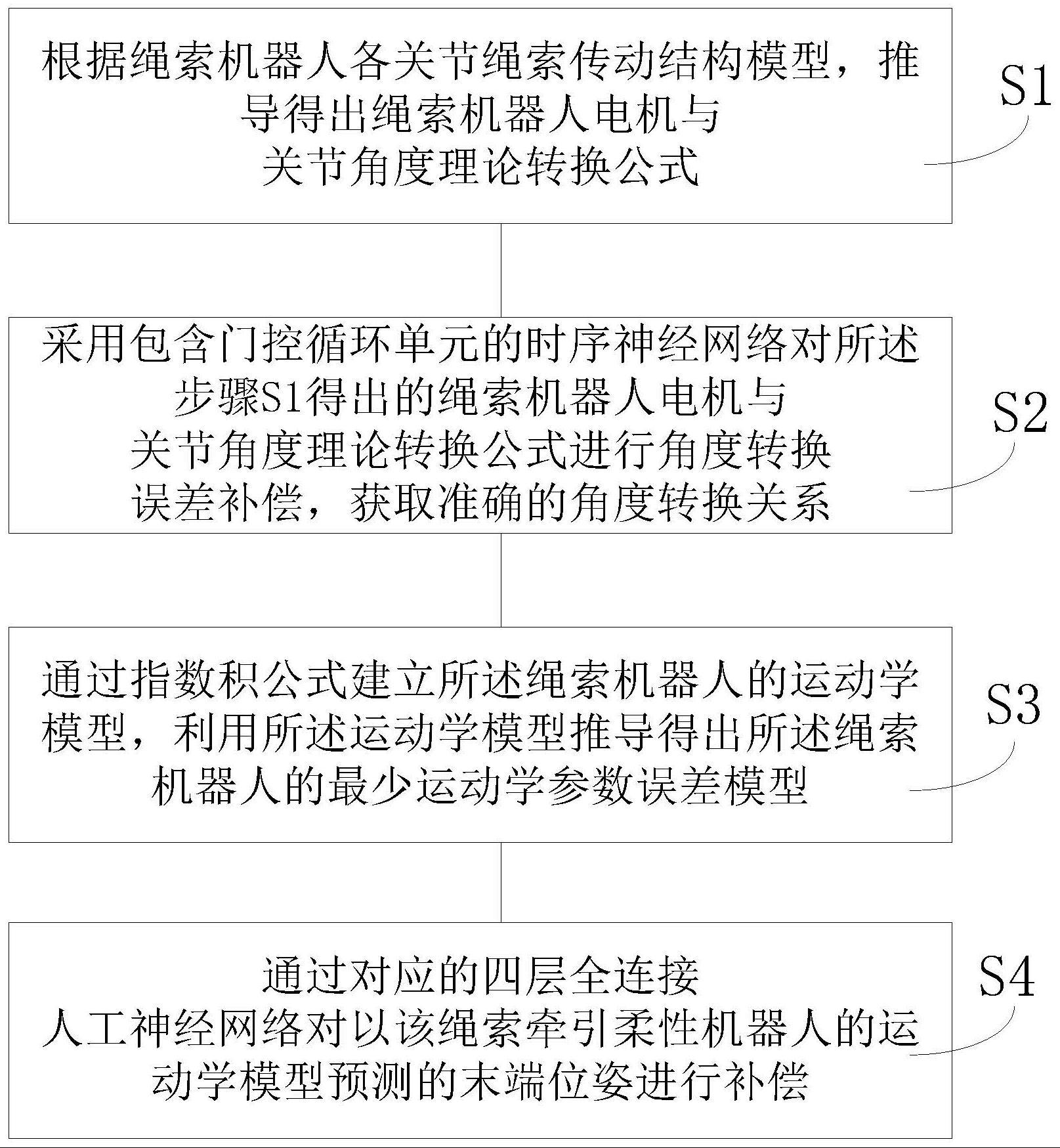
4、步骤s1,根据绳索机器人各关节绳索传动结构模型,推导得出绳索机器人电机与关节角度理论转换公式,所述绳索机器人指绳索牵引柔性机器人;
5、步骤s2,采用包含门控循环单元的时序神经网络对所述步骤s1得出的绳索机器人电机与关节角度理论转换公式进行角度转换误差补偿,获取准确的角度转换关系;
6、步骤s3,根据获取的准确角度转换关系通过指数积公式建立所述绳索机器人的运动学模型,利用所述运动学模型推导得出所述绳索机器人的最少运动学参数误差模型;
7、步骤s4,通过对应的四层全连接人工神经网络对所述绳索机器人的最少运动学参数误差模型进行训练,利用训练好的所述人工神经网络对以该绳索牵引柔性机器人的运动学模型预测的末端位姿进行补偿。
8、与现有技术相比,本发明所提供的绳索机器人的电机与关节角度转换修正及运动学标定方法,其有益效果包括:
9、在利用神经网络之前,通过根据绳索机器人各关节绳索传动结构模型,推导得出绳索机器人电机与关节角度理论转换公式,以及通过指数积公式建立所述绳索机器人的运动学模型,利用所述运动学模型推导得出所述绳索机器人的最少运动学参数误差模型的的处理,实现了充分考虑绳索对机器人电机与关节角度转换关系和运动学模型的影响,在实际物理模型的基础上,结合数据驱动的神经网络进一步提升绳索机器人电机与关节角度转换与运动学模型的准确度。此外,所提出的方法易于使用,仅需通过实验采集神经网络以及标定所需的系列数据,如:电机角度、速度和力矩等,即能实现标定,同时该方法具有较高泛用性,可以很好地推广至具有类似结构的绳索牵引柔性机器人中,极大地缓解了目前绳索牵引柔性机器人模型不够准确的问题。
技术特征:
1.一种绳索机器人的电机与关节角度转换修正及运动学标定方法,其特征在于,包括:
2.根据权利要求1所述的绳索机器人的电机与关节角度转换修正及运动学标定方法,其特征在于,所述步骤s1中,按以下方式根据绳索机器人各关节绳索传动结构模型,推导得出绳索机器人电机与关节角度理论转换公式,包括:
3.根据权利要求1所述的绳索机器人的电机与关节角度转换修正及运动学标定方法,其特征在于,所述步骤s2中,包含门控循环单元的时序神经网络包括:
4.根据权利要求1-3任一项所述的绳索机器人的电机与关节角度转换修正及运动学标定方法,其特征在于,所述步骤s3中,依据绳索牵引柔性机器人的肩、肘和腕关节构型特征,采用指数积公式建立该绳索牵引柔性机器人的运动学模型,根据该运动学模型推导得出该绳索牵引柔性机器人的最少运动学参数误差模型。
5.根据权利要求1-3任一项所述的绳索机器人的电机与关节角度转换修正及运动学标定方法,其特征在于,所述步骤s5中,通过对应的四层全连接人工神经网络,以所述绳索牵引柔性机器人的电机角度为输入,所述绳索牵引柔性机器人的末端位置误差为输出,对以该绳索牵引柔性机器人的运动学模型预测的末端位姿进行补偿。
6.根据权利要求5所述的绳索机器人的电机与关节角度转换修正及运动学标定方法,其特征在于,所述四层全连接人工神经网络由一个输入层依次连接两个隐藏层和一个输出层构成。
技术总结
本发明公开了一种绳索机器人的电机与关节角度转换修正及运动学标定方法,旨在获得绳索牵引柔性机器人的准确运动学模型。该方法包括:基于数值拟合方法与时序神经网络进行误差补偿的方法获取准确电机与关节角度转换关系;基于最少运动学参数误差模型并结合人工神经网络,提出了一种考虑运动学参数误差与绳索弹性等非几何因素影响的运动学标定方法。该方法针对绳索牵引柔性机器人由于绳索所带来的模型不确定性,在基于机器人实际物理模型的同时,结合了数据驱动的神经网络方法。相比机器人名义运动学模型以及常规刚性机器人运动学标定方法,本发明能够获取更加准确和符合实际的机器人运动学模型。
技术研发人员:尚伟伟,邓杰,庞顺翔,张飞,张金锋,黄杰,程智余
受保护的技术使用者:中国科学技术大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!