一种轨道式变电站智能巡视机器人的制作方法
本发明涉及巡视机器人,尤其涉及一种轨道式变电站智能巡视机器人。
背景技术:
1、轨道巡检机器人可以特殊环境下执行特巡和定制性巡检任务的机器人。可实现自主定位与导航,搭载特定摄像机,如全景相机或双光云台相机及多种环境监测模块传感器,可实时拍摄及感应周边环境,实现远程在线监测及数据分析。能够替代人工完成例行巡查、故障诊断、预警报警灯任务。
2、在专利cn202010403646.x中提及一种轨道式变电站智能巡视机器人,利用等距的行走轮位为底板提供限位支撑实现直角转弯,并使用齿轮与齿形条进行驱动,但机器人行驶的轨道上需设置等长的齿形条,增加了使用成本和加工安装的难度。
技术实现思路
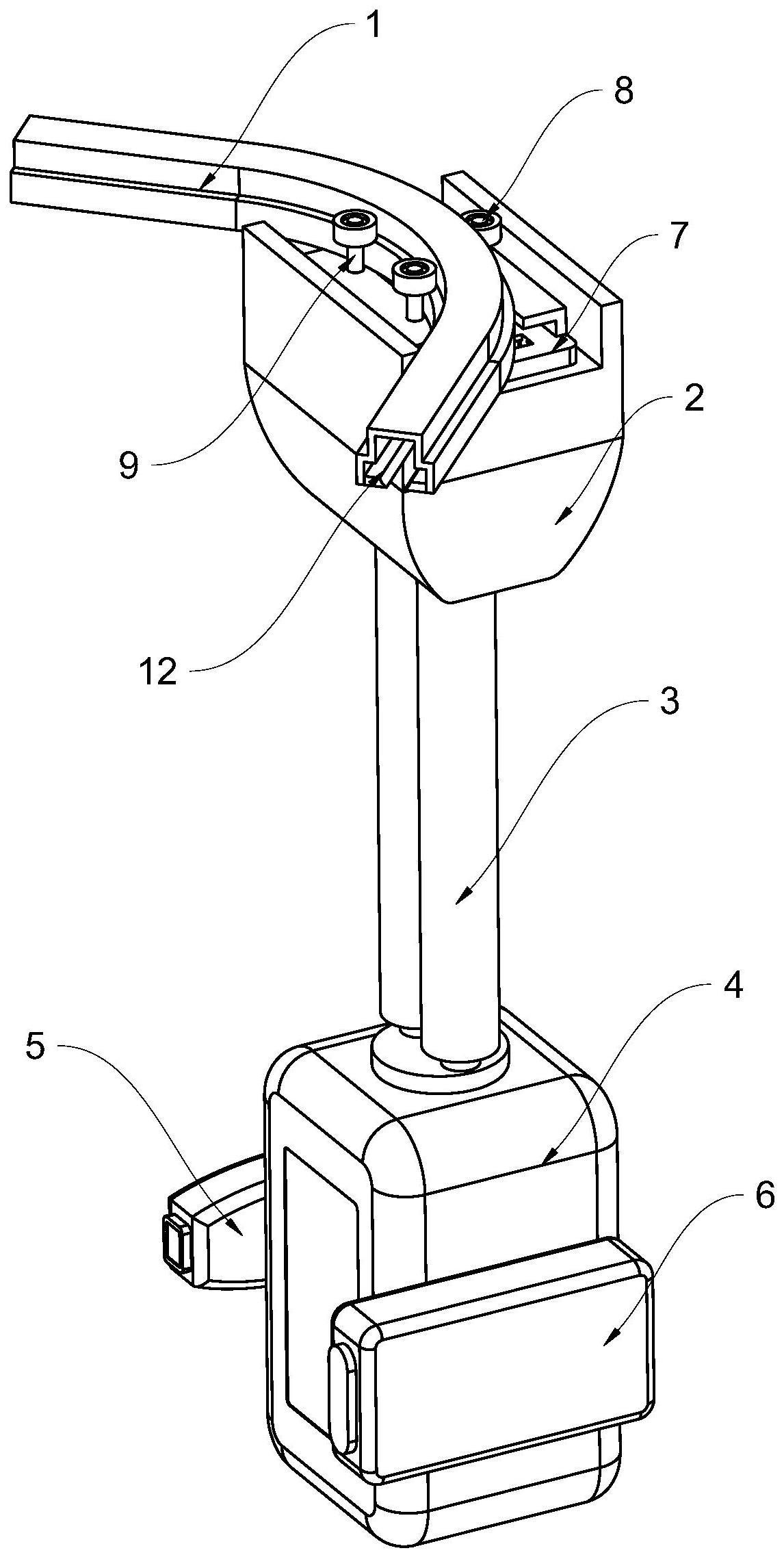
1、本发明实施例提供了一种轨道式变电站智能巡视机器人,包括行走轨道和底座,底座底部设置有升降架,升降架底部设置有控制终端,控制终端两侧分别设置有摄像模块和红外测温模块,底座顶部设置有底盘,底盘顶部设置有三个行走轮,三个行走轮底部均设置有轮轴,三个轮轴一端均贯穿底盘延伸至底座内;
2、底盘中部设置有三个安装架,三个安装架顶部均转动插接有转动球,行走轨道底部两侧均支撑轨,中部的安装架底部与底盘固定连接,两端的安装架与底盘之间设置有调整机构。
3、作为上述技术方案的优选,调整机构包括两个滑动槽,两个滑动槽内部均活动插接有滑动块,滑动块两端均固定连接有辅助弹簧,两个辅助弹簧一端均与滑动槽内壁固定连接,两个滑动块与两个安装架之间设置有偏转装置。
4、作为上述技术方案的优选,偏转装置包括旋转块,旋转块转动插接在滑动块内部,滑动块底部固定连接有推动块,推动块一侧设置齿形条,齿形条与滑动槽内壁固定连接。
5、作为上述技术方案的优选,底座内部设置有驱动电机,驱动电机输出端与其中一个轮轴连接。
6、作为上述技术方案的优选,三个行走轮之间的的距离均相同,三个行走轮的侧边和底部与行走轨道表面紧密贴合。
7、作为上述技术方案的优选,两个支撑轨一侧表面为弧形设置,两个支撑轨中部弧形面与转动球相匹配,两个支撑轨与行走轨道为一体成型设置。
8、作为上述技术方案的优选,滑动块截面为凸台形设置,滑动槽与其相匹配。
9、作为上述技术方案的优选,推动块表面设置有若干齿牙,推动块齿牙表面与齿形条相匹配,两个偏转装置相对底盘中部对称设置。
10、作为上述技术方案的优选,两端的安装架的旋转角度均为-20-20之间,两端的安装架相对底盘中部为对称设置。
11、从以上技术方案可以看出,本发明实施例具有以下优点:
12、本实施例中,利用多个转动球与支撑轨配合对底盘和巡视机器人整体进行支撑,避免行走轮在行走时底部与行走轨道表面摩擦,仅需行走轮驱动便可使得巡视机器人进行移动,无需外设其他驱动装置增加使用成本,并且调整机构能够在转弯处满足转动球的位移,确保转动球对巡视机器人的支撑效果,使得巡视机器人的移动更为稳定。
13、利用转动球对滑动块的推动为偏转装置提供动力,使得安装架在经过转弯处发生对应的旋转,安装架在两个弯曲的支撑轨之间正常移动,避免出现安装架与支撑轨表面撞击摩擦导致导致巡视机器人无法移动的问题。
技术特征:
1.一种轨道式变电站智能巡视机器人,其特征在于,包括行走轨道(1)和底座(2),底座(2)底部设置有升降架(3),升降架(3)底部设置有控制终端(4),控制终端(4)两侧分别设置有摄像模块(5)和红外测温模块(6),底座(2)顶部设置有底盘(7),底盘(7)顶部设置有三个行走轮(8),三个行走轮(8)底部均设置有轮轴(9),三个轮轴(9)一端均贯穿底盘(7)延伸至底座(2)内;
2.根据权利要求1所述的一种轨道式变电站智能巡视机器人,其特征在于,调整机构包括两个滑动槽(13),两个滑动槽(13)内部均活动插接有滑动块(14),滑动块(14)两端均固定连接有辅助弹簧(15),两个辅助弹簧(15)一端均与滑动槽(13)内壁固定连接,两个滑动块(14)与两个安装架(10)之间设置有偏转装置。
3.根据权利要求2所述的一种轨道式变电站智能巡视机器人,其特征在于,偏转装置包括旋转块(16),旋转块(16)转动插接在滑动块(14)内部,滑动块(14)底部固定连接有推动块(17),推动块(17)一侧设置齿形条(18),齿形条(18)与滑动槽(13)内壁固定连接。
4.根据权利要求1所述的一种轨道式变电站智能巡视机器人,其特征在于,底座(2)内部设置有驱动电机,驱动电机输出端与其中一个轮轴(9)连接。
5.根据权利要求1所述的一种轨道式变电站智能巡视机器人,其特征在于,三个行走轮(8)之间的的距离均相同,三个行走轮(8)的侧边和底部与行走轨道(1)表面紧密贴合。
6.根据权利要求1所述的一种轨道式变电站智能巡视机器人,其特征在于,两个支撑轨(12)一侧表面为弧形设置,两个支撑轨(12)中部弧形面与转动球(11)相匹配,两个支撑轨(12)与行走轨道(1)为一体成型设置。
7.根据权利要求2所述的一种轨道式变电站智能巡视机器人,其特征在于,滑动块(14)截面为凸台形设置,滑动槽(13)与其相匹配。
8.根据权利要求3所述的一种轨道式变电站智能巡视机器人,其特征在于,推动块(17)表面设置有若干齿牙,推动块(17)齿牙表面与齿形条(18)相匹配,两个偏转装置相对底盘(7)中部对称设置。
9.根据权利要求1所述的一种轨道式变电站智能巡视机器人,其特征在于,两端的安装架(10)的旋转角度均为-20-20之间,两端的安装架(10)相对底盘(7)中部为对称设置。
技术总结
本发明实施例公开了一种轨道式变电站智能巡视机器人,包括行走轨道和底座,底座顶部设置有底盘,底盘顶部设置有三个行走轮,三个行走轮底部均设置有轮轴,底盘中部设置有三个安装架,三个安装架顶部均转动插接有转动球,行走轨道底部两侧均支撑轨,两端的安装架与底盘之间设置有调整机构。利用多个转动球与支撑轨配合对底盘和巡视机器人整体进行支撑,避免行走轮在行走时底部与行走轨道表面摩擦,仅需行走轮驱动便可使得巡视机器人进行移动,无需外设其他驱动装置增加使用成本,并且调整机构能够在转弯处满足转动球的位移,确保转动球对巡视机器人的支撑效果,使得巡视机器人的移动更为稳定。
技术研发人员:陈泰峰
受保护的技术使用者:南方电网数字电网集团(海南)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!