一种连续体机器人
本发明涉及机器人领域,尤其是涉及一种连续体机器人。
背景技术:
1、连续体机器人是近年来机器人领域研究的热点。连续体机器人研究的最主要灵感来源于仿生,近年来国内外学者根据象鼻、章鱼触手等柔性生物结构提出了不同构型的柔性机械臂,按照驱动方式大致可以分为:基于流体的变压力驱动、基于线杆变长度的欠驱动和基于智能材料变形的驱动。近些年,由于柔性机械臂具有高柔顺性和灵活性等特点,能够较好的适用于复杂非结构环境,已经在地震搜救、微创手术等领域得到了充分的应用。
2、例如公开号为cn116214519a的发明,该发明公开了一种基于视觉的绳驱动连续体机器人的末端位置检测方法,获取绳驱动连续体机器人末端圆球沿机器人中心轴线方向的顶端检测点以及圆盘底座上设置的三个检测点,分别定义为第一、第二、第三和第四目标检测点,基于双目相机,分别获取绳驱动连续体机器人的左眼图像和右眼图像,并根据左眼图像和右眼图像,获取四个目标检测点在双目相机坐标系中的三维位置坐标,根据得到的三维位置坐标,通过立体几何方法得到绳驱动连续体机器人的弯曲角和旋转角。
3、机器视觉的缺点在于难以实现自感知,上述方法需要在环境中选取目标检测点进行测量,再通过立体几何计算得出机器人在环境中的位置,难以通过机器人自身运动过程对机器人当前状态进行分析。由于常见的连续体机器人为线驱动,模拟驱动线拉伸的力学模型极难建立,并且连续体机器人为柔性结构,传统的刚性机器人动力学分析和控制方法不能满足连续体机器人的分析及控制需求,因此开发一种能够自感知的连续体机器人是非常有必要的。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的难以满足分析及控制需求的缺陷而提供一种能够自感知的连续体机器人。
2、本发明的目的可以通过以下技术方案来实现:
3、一种连续体机器人,包括卡线座、电机和机器人驱动节,卡线座固定在电机上,机器人驱动节包括传感盘、卡线盘、传感器、中心杆和驱动线,传感器安装在传感盘上,卡线座、传感盘和卡线盘均设有中心孔、扇形孔和穿线孔,中心杆穿过并连接卡线座、传感盘和卡线盘的中心孔,卡线座和卡线盘分别位于中心杆的两端,穿线孔在卡线座、传感盘和卡线盘的分布方式为均匀分布,驱动线穿过卡线座、传感盘和卡线盘上的穿线孔,驱动线一端连接在卡线盘上,另一端连接在电机上。
4、进一步地,机器人驱动节的数量为多个,相邻两个机器人驱动节的中心杆连接在卡线盘上,每个卡线盘均通过驱动线连接该卡线盘和电机,该驱动线还穿过该卡线盘与电机之间所有的卡线座、传感盘和卡线盘上的穿线孔。
5、进一步地,传感盘分为大传感盘和小传感盘,卡线盘分为大卡线盘和小卡线盘,大传感盘与大卡线盘的结构均分为外侧区域与中心区域,外侧区域均分布有穿线孔,大传感盘的中心区域的结构与小传感盘的结构相对应,大卡线盘的中心区域的结构与小卡线盘的结构相对应。
6、进一步地,机器人驱动节还包括间隔盘,间隔盘上有中心孔、扇形孔和穿线孔,中心杆穿过并连接间隔盘的中心孔,驱动线穿过间隔盘的穿线孔。
7、进一步地,机器人驱动节还包括连接所有的传感器的can总线,该can总线穿过卡线座、传感盘和卡线盘的扇形孔。
8、进一步地,机器人驱动节还包括锁紧机构,锁紧机构将驱动线固定在卡线盘上。
9、进一步地,锁紧机构包括压座和压片,驱动线穿过压座,压片用于固定驱动线,压座下部有圆柱型凸台与卡线盘上的穿线孔相对应。
10、进一步地,传感盘在中心杆上的分布方式为均匀分布。
11、进一步地,传感器为九轴惯导传感器。
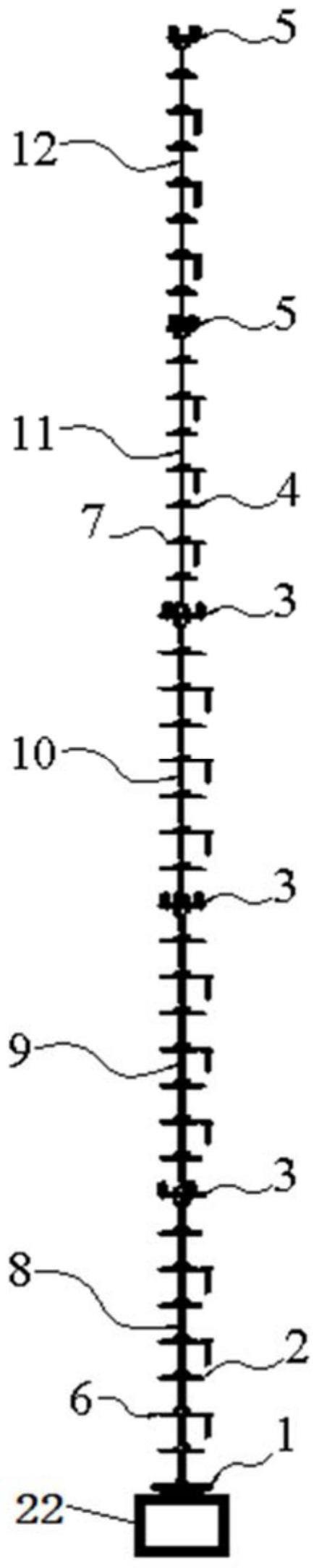
12、进一步地,机器人驱动节的数量为五个,机器人驱动节依照长度由短到长依次为第一机器人驱动节、第二机器人驱动节、第三机器人驱动节、第四机器人驱动节和第五机器人驱动节,第一机器人驱动节、第二机器人驱动节和第三机器人驱动节中的卡线盘为大卡线盘3、传感盘为大传感盘6,第四机器人驱动节和第五机器人驱动节中的卡线盘为小卡线盘5、传感盘为小传感盘7,中心杆依次为第一中心杆8、第二中心杆9、第三中心杆10、第四中心杆11和第五中心杆12,驱动线依次为第一节驱动线16、第二节驱动线17、第三节驱动线18、第四节驱动线19和第五节驱动线20,每节驱动线均包括三根等长的驱动线,三根等长的驱动线均连接该节对应的卡线盘和电机22。
13、与现有技术相比,本发明具有以下有益效果:
14、1、本发明提供了一种连续体机器人,采用线驱动的方式实现对机器人驱动节的控制,使机器人可以进行旋转和弯曲,传感器安装在具有中心孔、扇形镂空和穿线孔的传感盘上,将传感盘作为连续体机器人的一部分融入到整体结构之中,使得传感器可以获得连续体机器人的姿态信息,从而实现连续体机器人的自感知,为连续体机器人的控制提供数据支持。
15、2、本发明的连续体机器人可以具有多节,通过电机对每一节的驱动线分别进行控制,可以实现连续体机器人更多角度的弯曲方式。
16、3、本发明传感器采用九轴惯导传感器,可以准确、实时地得知传感盘布置点的姿态信息,从而通过算法进一步推算连续体机器人的整体姿态,从而实现闭环控制。
17、4、本发明多传感器相连采用can总线的连接方式,当出现单一传感器报错的情况下,仍然不影响整体数据的接收。
18、5、本发明通过均布设计,能够均匀的获得连续体机器人的传感信息,从而更好地获取连续体机器人的空间位置。
19、6、本发明所用的传感器安装在传感盘上,方便安装与拆卸,易于进行后期维护调试。
技术特征:
1.一种连续体机器人,其特征在于,包括卡线座、电机和机器人驱动节,所述卡线座固定在电机上,所述机器人驱动节包括传感盘、卡线盘、传感器、中心杆和驱动线,所述传感器安装在传感盘上,所述卡线座、传感盘和卡线盘均设有中心孔、扇形孔和穿线孔,所述中心杆穿过并连接卡线座、传感盘和卡线盘的中心孔,所述卡线座和卡线盘分别位于中心杆的两端,所述穿线孔在卡线座、传感盘和卡线盘的分布方式为均匀分布,所述驱动线穿过所述卡线座、传感盘和卡线盘上的穿线孔,所述驱动线一端连接在卡线盘上,另一端连接在电机上。
2.根据权利要求1所述的一种连续体机器人,其特征在于,所述机器人驱动节的数量为多个,相邻两个机器人驱动节的中心杆连接在卡线盘上,每个卡线盘均通过驱动线连接该卡线盘和电机,该驱动线还穿过该卡线盘与电机之间所有的卡线座、传感盘和卡线盘上的穿线孔。
3.根据权利要求2所述的一种连续体机器人,其特征在于,所述传感盘分为大传感盘和小传感盘,所述卡线盘分为大卡线盘和小卡线盘,所述大传感盘与大卡线盘的结构均分为外侧区域与中心区域,所述外侧区域均分布有穿线孔,所述大传感盘的中心区域的结构与小传感盘的结构相对应,所述大卡线盘的中心区域的结构与小卡线盘的结构相对应。
4.根据权利要求1所述的一种连续体机器人,其特征在于,所述机器人驱动节还包括间隔盘,所述间隔盘上有中心孔、扇形孔和穿线孔,所述中心杆穿过并连接间隔盘的中心孔,所述驱动线穿过所述间隔盘的穿线孔。
5.根据权利要求1所述的一种连续体机器人,其特征在于,所述机器人驱动节还包括连接所有的传感器的can总线,该can总线穿过所述卡线座、传感盘和卡线盘的扇形孔。
6.根据权利要求1所述的一种连续体机器人,其特征在于,所述机器人驱动节还包括锁紧机构,所述锁紧机构将所述驱动线固定在卡线盘上。
7.根据权利要求6所述的一种连续体机器人,其特征在于,所述锁紧机构包括压座和压片,所述驱动线穿过压座,所述压片用于固定驱动线,压座下部有圆柱型凸台与所述卡线盘上的穿线孔相对应。
8.根据权利要求1所述的一种连续体机器人,其特征在于,所述传感盘在中心杆上的分布方式为均匀分布。
9.根据权利要求1所述的一种连续体机器人,其特征在于,所述传感器为九轴惯导传感器。
10.根据权利要求3所述的一种连续体机器人,其特征在于,所述机器人驱动节的数量为五个,所述机器人驱动节依照长度由短到长依次为第一机器人驱动节、第二机器人驱动节、第三机器人驱动节、第四机器人驱动节和第五机器人驱动节,所述第一机器人驱动节、第二机器人驱动节和第三机器人驱动节中的卡线盘为大卡线盘(3)、传感盘为大传感盘(6),所述第四机器人驱动节和第五机器人驱动节中的卡线盘为小卡线盘(5)、传感盘为小传感盘(7),所述中心杆依次为第一中心杆(8)、第二中心杆(9)、第三中心杆(10)、第四中心杆(11)和第五中心杆(12),所述驱动线依次为第一节驱动线(16)、第二节驱动线(17)、第三节驱动线(18)、第四节驱动线(19)和第五节驱动线(20),每节驱动线均包括三根等长的驱动线,三根等长的驱动线均连接该节对应的卡线盘和电机(22)。
技术总结
本发明涉及一种连续体机器人,包括卡线座、电机和机器人驱动节,卡线座固定在电机上,机器人驱动节包括传感盘、卡线盘、传感器、中心杆和驱动线,传感器安装在传感盘上,中心杆穿过并连接卡线座、传感盘和卡线盘的中心孔,卡线座和卡线盘分别位于中心杆的两端,驱动线穿过卡线座、传感盘和卡线盘上的穿线孔,驱动线一端连接在卡线盘上,另一端连接在电机上。与现有技术相比,本发明采用线驱动的方式实现对机器人驱动节的控制,使机器人可以进行旋转和弯曲,将传感盘作为连续体机器人的一部分融入到整体结构之中,使得传感器可以获得连续体机器人的姿态信息,从而实现连续体机器人的自感知,为连续体机器人的控制提供数据支持。
技术研发人员:张泉,郭磊,暴文婧,李龙,田应仲
受保护的技术使用者:上海大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!