一种可任意更换功能模块的轨道巡检机器人的制作方法
本发明涉及巡检机器人,具体涉及一种可任意更换功能模块的轨道巡检机器人。
背景技术:
1、随着养猪场对生物安全一贯的重视,轨道巡检自机器人正越来越多的应用在养猪场中。同时,养猪场的功能需求也比较多,比如测膘,巡栏,点数,测温,估重,气体检测,环境温湿度检测,呼吸心跳,咳嗽检测,余料检测等等,每一个功能都需要一个对应模块来实现,安装在轨道机器人上。
2、由于养猪场自身所负责的任务不同,对轨道机器人所需功能也不相同。比如种猪场,对机器人功能要求更多的是余料检测、测温,测膘,气体检测,呼吸心跳,温湿度,巡航时间长等;而育肥场,对机器人功能要求则变成了巡栏,点数,估重,咳嗽,呼吸心跳,温湿度等;甚至还有不同的客户,对同一个猪场的功能要求也不尽相同,这就导致了机器人的配置非常多,大大增加了机器人的设计难度,要么产品大而功能全,要么产品小而型号多,无法二者兼顾。
3、因此,本申请提出一种可任意更换功能模块的轨道巡检机器人,本申请将各个功能或者多个小功能集成在一个个的结构模组中,通过搭积木的方式,来满足不同猪场对巡检机器人不同功能的要求。
技术实现思路
1、本发明的目的在于提供一种可任意更换功能模块的轨道巡检机器人,动力底盘通过行车机构悬挂于行车轨道上,动力底盘中包含有行走系统+控制系统+若干组磁铁模组;功能模块则分为电池模块长续航、电池模块短续航、余料检测模块、点数模块等若干模块,每个功能模块除相应功能外,均包含有固定用的磁铁模组和功能连接用的触点式连接器模组;各功能模块则通过触点式连接器与底盘连接,开启相应功能,即可使用。
2、本发明的目的可以通过以下技术方案实现:
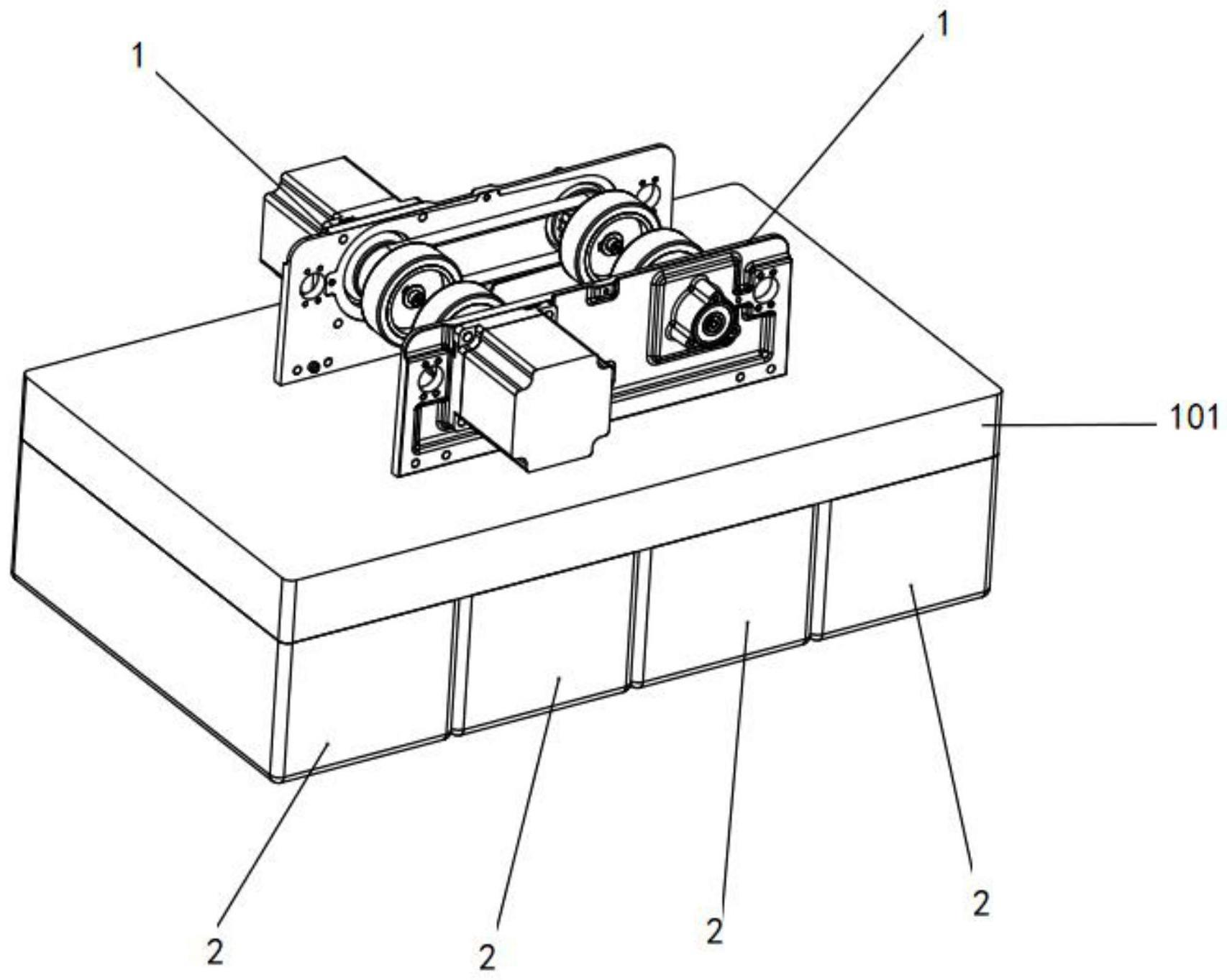
3、一种可任意更换功能模块的轨道巡检机器人,包括动力模块和多个功能模块:
4、所述动力模块包括行走机构和动力底盘,所述行走机构固定设置在所述动力底盘的外部顶面上;
5、在所述动力底盘的内部空腔内开设有多个模块安装区域,每个所述模块安装区域内均安装有不同的功能模块。
6、作为本发明进一步的方案:所述功能模块所作用的区域内设置有用于供行走机构的行走轨道;
7、所述行走机构架设在所述行走轨道上。
8、作为本发明进一步的方案:所述行走机构设置有两个,两个所述行走机构沿动力底盘水平方向上的中线对称设置在动力底盘的两侧。
9、作为本发明进一步的方案:所述行走机构包括设置在动力底盘外部盘面上的固定板,在所述固定板一侧的侧面上设置有两个行走轮,两个行走轮之间通过皮带连接;
10、在所述固定板另一侧的侧面上设置有驱动电机,驱动电机的输出轴与任意一个行走轮所对应的连接轴连接。
11、作为本发明进一步的方案:所述动力底盘的每个模块安装区域内均设置有两个第一磁铁组,所述第一磁铁组固定设置在动力底盘内部顶面上。
12、作为本发明进一步的方案:在两个所述第一磁铁组之间设置有触点连接模组插接头。
13、作为本发明进一步的方案:所述功能模块与动力底盘相接触的顶面上设置有两块第二磁铁组,两个所述第二磁铁组之间设置有触点连接模组插接口。
14、作为本发明进一步的方案:所述第一磁铁组与所述第二磁铁组的磁性相反,使第一磁铁组与第二磁铁组相吸实现功能模块在所述动力底盘内的安装。
15、作为本发明进一步的方案:所述触点连接模组插接口与所述触点连接模组插接头相适配。
16、作为本发明进一步的方案:每个所述模块安装区域内的所述功能模块工作相互独立。
17、本发明的有益效果:本发明中动力底盘通过行车机构悬挂于行车轨道上,动力底盘中包含有行走系统+控制系统+若干组磁铁模组;功能模块则分为电池模块长续航、电池模块短续航、余料检测模块、点数模块等若干模块,每个功能模块除相应功能外,均包含有固定用的磁铁模组和功能连接用的触点式连接器模组;
18、当养猪场确认好所需功能后,匹配好相应模块,现场将模块通过磁吸方式,吸附于底盘上,各功能模块则通过触点式连接器与底盘连接,开启相应功能,即可使用,达到经济和功能兼容的目的。
技术特征:
1.一种可任意更换功能模块的轨道巡检机器人,其特征在于,包括动力模块和多个功能模块(2):
2.根据权利要求1所述的一种可任意更换功能模块的轨道巡检机器人,其特征在于,所述功能模块(2)所作用的区域内设置有用于供行走机构(1)的行走轨道;
3.根据权利要求2所述的一种可任意更换功能模块的轨道巡检机器人,其特征在于,所述行走机构(1)设置有两个,两个所述行走机构(1)沿动力底盘(101)水平方向上的中线对称设置在动力底盘(101)的两侧。
4.根据权利要求3所述的一种可任意更换功能模块的轨道巡检机器人,其特征在于,所述行走机构(1)包括设置在动力底盘(101)外部盘面上的固定板,在所述固定板一侧的侧面上设置有两个行走轮,两个行走轮之间通过皮带连接;
5.根据权利要求1所述的一种可任意更换功能模块的轨道巡检机器人,其特征在于,所述动力底盘(101)的每个模块安装区域内均设置有两个第一磁铁组(102),所述第一磁铁组(102)固定设置在动力底盘(101)内部顶面上。
6.根据权利要求5所述的一种可任意更换功能模块的轨道巡检机器人,其特征在于,在两个所述第一磁铁组(102)之间设置有触点连接模组插接头(103)。
7.根据权利要求6所述的一种可任意更换功能模块的轨道巡检机器人,其特征在于,所述功能模块(2)与动力底盘(101)相接触的顶面上设置有两块第二磁铁组(201),两个所述第二磁铁组(201)之间设置有触点连接模组插接口(202)。
8.根据权利要求7所述的一种可任意更换功能模块的轨道巡检机器人,其特征在于,所述第一磁铁组(102)与所述第二磁铁组(201)的磁性相反,使第一磁铁组(102)与第二磁铁组(201)相吸实现功能模块(2)在所述动力底盘(101)内的安装。
9.根据权利要求7所述的一种可任意更换功能模块的轨道巡检机器人,其特征在于,所述触点连接模组插接口(202)与所述触点连接模组插接头(103)相适配。
10.根据权利要求1所述的一种可任意更换功能模块的轨道巡检机器人,其特征在于,每个所述模块安装区域内的所述功能模块(2)工作相互独立。
技术总结
本发明公开了一种可任意更换功能模块的轨道巡检机器人,包括动力模块和多个功能模块:所述动力模块包括行走机构和动力底盘,所述行走机构固定设置在所述动力底盘的外部顶面上;在所述动力底盘的内部空腔内开设有多个模块安装区域,每个所述模块安装区域内均安装有不同的功能模块;本发明中动力底盘通过行车机构悬挂于行车轨道上,动力底盘中包含有行走系统+控制系统+若干组磁铁模组;功能模块则分为电池模块长续航、电池模块短续航、余料检测模块、点数模块等若干模块,均包含有固定用的磁铁模组和功能连接用的触点式连接器模组;当养猪场确认好所需功能后,匹配好相应模块,开启相应功能,即可使用,达到经济和功能兼容的目的。
技术研发人员:曹井管,彭安宁
受保护的技术使用者:合肥匠新笃志智能科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!