一种轧机线上的在线机器人精整平台的制作方法
本发明涉及冶金精整自动化,特别涉及一种轧线上的在线机器人精整平台。
背景技术:
1、轧制加工需要合格的原料,即不能有表面和内部缺陷。否则会产生残、次品。传统的轧机在轧制过程中对于轧材原料的表面、内部缺陷没有控制手段,轧制完成后补救余地就小多了。以轧钢的工序为例,轧钢的原料必须经过表面检测或内部质量检测合格才能送轧钢工序。对不合格的轧坯需经过精整处理后再送轧钢。但是一直至今仍没有满意的内部质量检测手段和处理内部缺陷的方法。如何准确的确定尺寸小于5mm以下的内部缺陷,而且用最小的清除量去除缺陷,这些都是压力加工行业一直期望解决的目标。特别是对于钢坯热连轧而言,在基本不影响热装热送节奏和热轧制节奏的同时以最小的清除量清除缺陷,这些都是钢铁行业一直期望解决的问题。
2、针对上述问题本发明提出一种可行的在线实施精整平台,以解决这些问题。
技术实现思路
1、本发明为解决其技术问题采用的思路是:在轧制线上合理的布置检测和精整工具,能最大的提升产品合格率,而同时又不影响轧制过程。本发明的技术方案是这样实现的:
2、轧机线上的在线机器人精整平台,步骤如下:
3、1 .配置成能够在轧制线区域实时采集被轧制件表面图像的摄像机系统;
4、配置成能够根据图像实时检测缺陷位置及大小的图像处理系统;
5、配置成能够在轧制线区域实时进行缺陷精整处理的机器人系统;
6、配置成能够实时控制机器人系统进行缺陷精整处理的控制计算机;
7、其中,所述摄像机系统与所述图像处理系统相连接,所述图像处理系统、所述机器人系统均分别与所述控制计算机相连接。
8、2 . 配置成能够实时检测被轧制件与精整机器人或被轧制件与轧机之间相对位置的位置传感器及相关位置计算软件工具;所述位置传感器及计算位置数据传送给所述图像处理系统。
9、其中,所述机器人系统包括精整机器人。在轧机线上,所述精整机器人为多个,所述精整机器人为可移动设备。能够随缺陷移动而移动进行精整处理,也能在检修时离开轧机。
10、所述精整机器人包括底座、设置在所述底座上的具有移动功能臂以及设置在所述臂上的精整工具。精整工具包括:修磨砂轮,铣削、刨削刀具或火焰清理工具、气刨工具。
11、所述精整工具为多个并可以用不同工具重复处理缺陷,如钢坯精整,先用气刨处理、后用砂轮磨光。
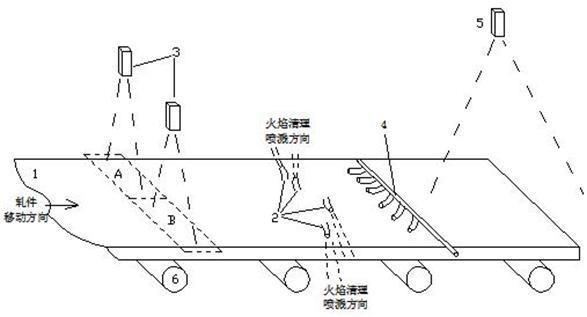
12、所述精整工具为砂轮或火焰清理时,精整修磨砂轮修磨切线方向、火焰清理渣子喷溅方向与被轧制件的移动方向的夹角范围为45°至135°。
13、所述摄像机系统包括设置于轧机轧辊出口区域、入口区域的摄像机,包括位于送被轧件去轧机输送线上的摄像机。
14、所述摄像机系统包括能拍摄所述精整机器人处理区域的摄像机或能与精整机器人确定相对位置的摄像机。此时摄像机能观测到缺陷移动位置,实时指示机器人如何移动去清除缺陷。这种工况要求所述摄像机为面阵摄像头。
15、配有能够生成被轧制件的整个轧制表面图像或在整个轧制表面区域上标注出各个缺陷相对于被轧制件端部的相对位置及缺陷大小的图像的图样系统。这个图像系统包括拼接图像系统。或配有能够生成被轧制件的多幅局部轧制表面图像,在各个图像上标注出各个缺陷相对于被轧制件端部的相对位置及缺陷大小的图像系统。控制计算机以此为依据对缺陷进行跟踪定位、控制精整机器人对被轧制件
16、对于小断面轧材,如薄带、棒材、线材、薄壁类型材,精整机器人进行精整时,被轧件承接精整力会出现变形,为此配置帮助或支撑被轧制件承受精整力且随所述被轧制件移动的部件。且这种部件可以是多个。配置这种部件位于被轧制件背面、起支撑作用的支撑块,或配置位于被轧制件正面带有吸力的吸力块。支撑面与被轧件背面平行或相近。为了避免支撑面划伤轧材面,支撑件支撑面的中间区域曲面与轧件同步移动。能采用的包括:由个或多个与轧件背面平行、相切的园辊支撑、且转动与被轧件移动方向相同;或采用单个或多个与被轧件背面平行、相近的支撑块支撑部件、且转移与轧件移动方向相同。
17、所述精整平台综合考虑整条线上的各个精整机器人精整量负担,其中位于送被轧件去轧机输送线上的精整机器人多采用火焰清理、气刨处理方式。
18、相比现有工艺流程,本发明具有以下优点:能大幅度提高轧材合格率。特别对于钢坯热装热送,可以在不影响热送热装温度的同时大幅提高最终产品合格率。
技术特征:
1.一种轧机线上的在线机器人精整平台,其特征在于,包括:
2.根据权利要求1所述的平台,其特征在于,还包括:
3.根据权利要求1所述的平台,其特征在于,所述精整机器人为多个、分布在轧机线上。
4.根据权利要求5所述的平台,其特征在于,所述精整工具包括修磨砂轮,铣削、刨削刀
5.根据权利要求1所述的平台,其特征在于,所述精整工具为多个、多种工具复用。
6.根据权利要求1所述的平台,其特征在于,所述摄像机系统包括能拍摄所述精整机
7.根据权利要求1所述的平台,其特征在于,还包括: 配有能够生成被轧制件的整个轧制表面图像、在整个轧制表面区域上标注出各个缺陷相对于被轧制件端部的相对位置及缺陷大小的图像系统,或配有能够在生成的多幅轧制件局部表面图像组上标注出各个缺陷相对于被轧制件端部的相对位置及缺陷大小的图像系统。
8.根据权利要求1所述的平台,其特征在于,还包括:配置成能够帮助或支撑被轧制件承受精整力且随所述被轧制件移动或转动的部件。
9.根据权利要求1、8所述的平台,其特征在于,所述部件为多个。
10.根据权利要求14所述的平台,其特征在于,所述部件采用设置在所述被轧制件背面
技术总结
本发明公开了一种轧机线上的在线机器人精整平台。该平台是把机器人精整工具应用于轧制线上,在轧机将被轧材轧薄过程中、能实时发现轧材表面新出现缺陷、实时精整处理对应缺陷的平台。该在线机器人精整平台具有能实时发现、处理铸坯内部缺陷。此方法能提高轧材的合格率。尤其在钢铁行业中能提高连铸连轧的轧材的合格率。
技术研发人员:白丹,崔立新
受保护的技术使用者:北京鼎新时代科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!