单连杆机械臂系统的迭代学习控制方法、设备及介质
本文件涉及机械臂控制,尤其涉及一种单连杆机械臂系统的迭代学习控制方法、设备及介质。
背景技术:
1、随着智能制造、人工智能等新技术的快速发展,工业互联网中的控制系统成为了近年来研究的热点。机械臂是在机器人技术领域得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗以及太空探索等领域有着广泛的应用。机械臂常见的工作模式是在相同的运行区间内不断重复操作,例如:搬运、切割等。在现实生产过程中,不可避免地发生一些突发事件,如产品掉落、设备故障等。为了保证人员和设备地安全,此时应该立即停止生产,由此导致智能生产系统的运行区间随机变化。
2、随着工业生产过程多样性和复杂性的提升,具有强耦合性、强非线性和不确定性的动态系统不断增多,其精确的数学模型越来越难以获得,并且由于系统不确定性和外部干扰的存在,极易令原有的数学模型失效,从而使得基于模型的传统控制方法无法完成高速、精确的跟踪任务。相比于传统控制方法,迭代学习控制有着许多优点,例如:对受控系统的先验知识要求比较低,它能够迭代的确定控制输入,从而在固定的时间间隔内跟踪给定的参考信号。但迭代学习控制仍然存在许多问题。例如:大部分已提出的迭代学习控制方法都要求学习的轨迹在迭代域中必须严格相同,如果控制目标或者任务规范发生变化,无论这个变化有多么小,受控系统都必须重新学习。而在实际的项目中,不同的迭代中,由于控制目标或者任务规范发生变化,导致参考轨迹发生变化,参考轨迹不再是迭代域中的不变集时,传统的迭代学习控制技术将不起作用。因此,需要一种针对机械臂的变期望轨迹的运行区间随机变化的迭代学习控制方法,有效克服当参考轨迹发生迭代变化和运行区间随机变化时,机械臂的控制问题。
技术实现思路
1、本说明书一个或多个实施例提供了一种单连杆机械臂系统的迭代学习控制方法,包括:
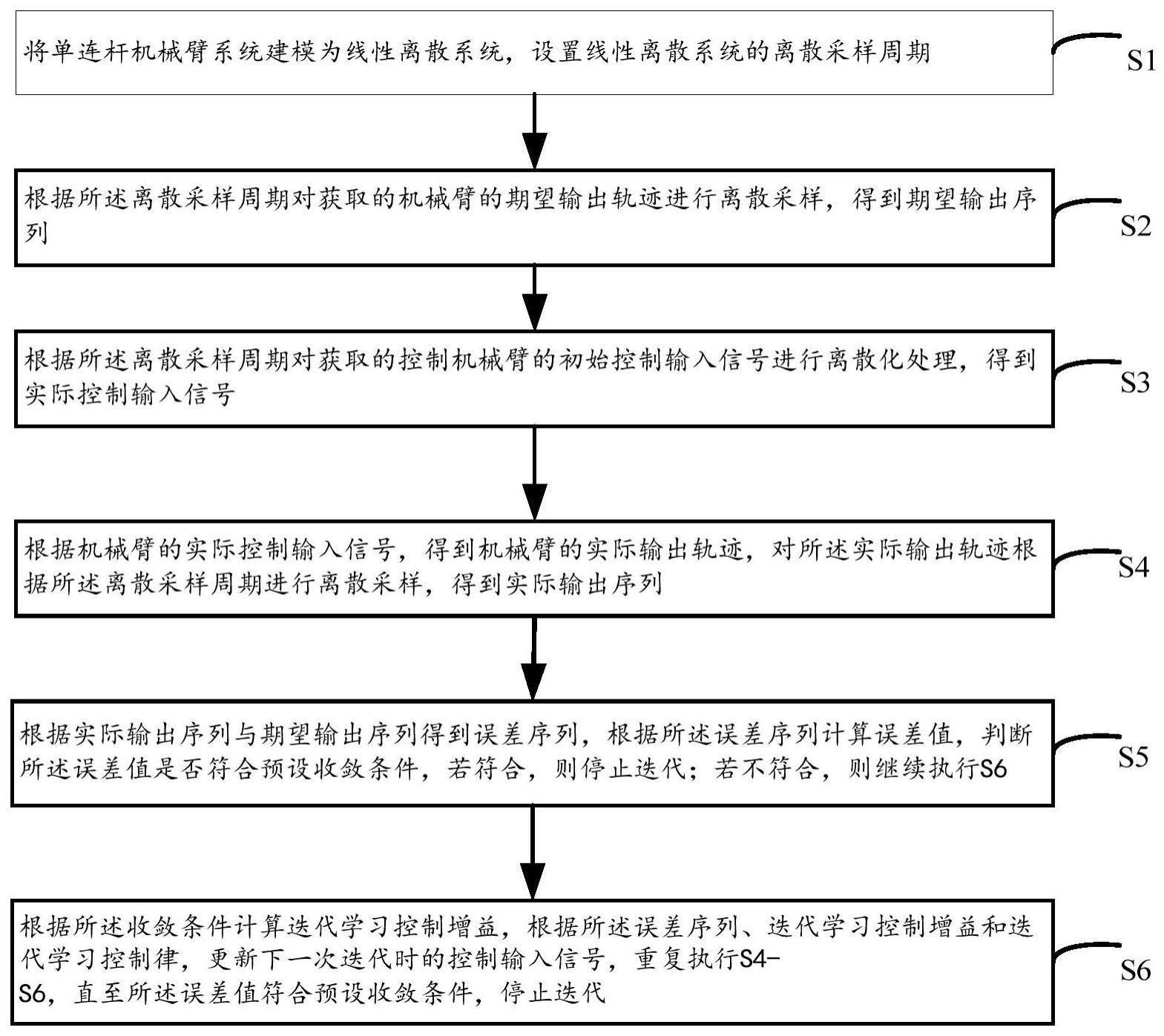
2、s1.将单连杆机械臂系统建模为线性离散系统,设置线性离散系统的离散采样周期;
3、s2.根据所述离散采样周期对获取的机械臂的期望输出轨迹进行离散采样,得到期望输出序列;
4、s3.根据所述离散采样周期对获取的控制机械臂的初始控制输入信号进行离散化处理,得到实际控制输入信号;
5、s4.根据机械臂的实际控制输入信号,得到机械臂的实际输出轨迹,对所述实际输出轨迹根据所述离散采样周期进行离散采样,得到实际输出序列;
6、s5.根据实际输出序列与期望输出序列得到误差序列,根据所述误差序列计算误差值,判断所述误差值是否符合预设收敛条件,若符合,则停止迭代;若不符合,则继续执行s6;
7、s6.根据所述收敛条件计算迭代学习控制增益,根据所述误差序列、迭代学习控制增益和迭代学习控制律,更新下一次迭代时的控制输入信号,重复执行s4-s6,直至所述误差值符合预设收敛条件,停止迭代。
8、本说明书一个或多个实施例提供了一种电子设备,包括:
9、处理器;以及被安排成存储计算机可执行指令的存储器,所述计算机可执行指令在被执行时使所述处理器实现上述单连杆机械臂的迭代学习控制方法的步骤。
10、本说明书一个或多个实施例提供了一种存储介质,用于存储计算机可执行指令,所述计算机可执行指令在被执行时实现上述单连杆机械臂的迭代学习控制方法的步骤。
11、本发明的有益效果如下:
12、本发明在期望轨迹迭代变化和运行区间随机变化的情况下,通过迭代学习控制方法对单连杆机械臂进行控制,可以有效克服当参考轨迹发生迭代变化和运行区间随机变化时,机械臂的控制问题;本发明可应用于期望轨迹迭代变化时,完成其它轨迹跟踪任务的系统,能够提高系统的工作效率,减少系统的运行时间,从而达到减少能源的消耗,降低生产的成本。
13、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术特征:
1.一种单连杆机械臂系统的迭代学习控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,单连杆机械臂系统模型表示为:
3.根据权利要求2所述的方法,其特征在于,所述将单连杆机械臂系统建模为线性离散系统具体为:
4.根据权利要求1所述的方法,其特征在于,步骤s2所述方法具体为:
5.根据权利要求1所述的方法,其特征在于,所述机械臂的期望输出轨迹yd,l(t)的运行区间为实际的输出轨迹yi,l(t)的运行区间为[0,nl];nl在每一次迭代时随机变化,且
6.根据权利要求5所述的方法,其特征在于,所述根据实际输出序列与期望输出序列得到误差序列具体为:
7.根据权利要求1所述的方法,其特征在于,所述收敛条件具体如下所示:
8.根据权利要求1所述的方法,其特征在于,所述迭代学习控制律根据所述跟踪误差序列和迭代学习控制增益l(k+1)进行计算,具体如下:
9.一种电子设备,其特征在于,包括:
10.一种存储介质,其特征在于,用于存储计算机可执行指令,所述计算机可执行指令在被执行时实现如权利要求1至8任一所述的单连杆机械臂的迭代学习控制方法的步骤。
技术总结
本说明书实施例提供了一种单连杆机械臂系统的迭代学习控制方法、设备及介质,其中,方法包括:对单连杆机械臂系统建模,设置离散采样周期;对机械臂的期望输出轨迹进行离散采样,得到期望输出序列;对初始控制输入信号进行离散化处理,得到实际控制输入信号,进而得到机械臂的实际输出轨迹,根据离散采样周期进行离散采样得到实际输出序列;根据实际输出序列与期望输出序列得到误差序列计算误差值,通过判断误差值是否符合预设收敛条件,若不符合,则计算迭代学习控制增益,根据误差序列、迭代学习控制增益和迭代学习控制律更新下次迭代的控制输入信号,直至误差值符合预设收敛条件时,停止迭代。
技术研发人员:韦蕴珊,鲍旭俊,尚文利,赵志甲
受保护的技术使用者:广州大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!