一种用于软体机器人的多级纤维阻塞变刚度织物结构
本发明涉及软体机器人,具体为一种用于软体机器人的多级纤维阻塞变刚度织物结构。
背景技术:
1、随着科学技术的发展,机器人对人类生活生产的影响力与日俱增。软体机器人是一种具有高柔性、适应性的机器人分支,尤其适合人机交互密切的场景,其中织物开发软体机器人已成为热门领域,织物类软体机器人层出不穷。与其它类型机器人相比,软体机器人的机械骨骼结构既要具有良好的柔性,又要保证能够具有一定刚度而对外界进行作用,因此需要具有可变刚度的设计。
2、为了解决软体机器人机械骨骼需要变刚度的问题,目前已有丝张紧法、变相材料法、负压阻塞法。丝张紧法是对离散的结构施加压紧力、限制结构单元间的相对运动,但该方法对结构刚度要求高,不适合柔软的结构材料。相变材料法是通过控制温度来改变材料的相态,但在变相过程需要一定时间。负压阻塞法通过负压压紧离散的材料实现刚度的转换,通过气压进行控制的响应速度快。但颗粒、片材等阻塞材料占用体积较大,而纤维阻塞方法目前的设计方案只是把纤维进行简单的并行堆积,结构稳定性差,体积较大,变刚度效果也一般。
3、综上,针对软体机器人变刚度设计中面临的结构稳定性与变刚度能力局限的问题,本案由此而生。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种用于软体机器人的多级纤维阻塞变刚度织物结构,解决了上述背景技术中提出的问题。
3、(二)技术方案
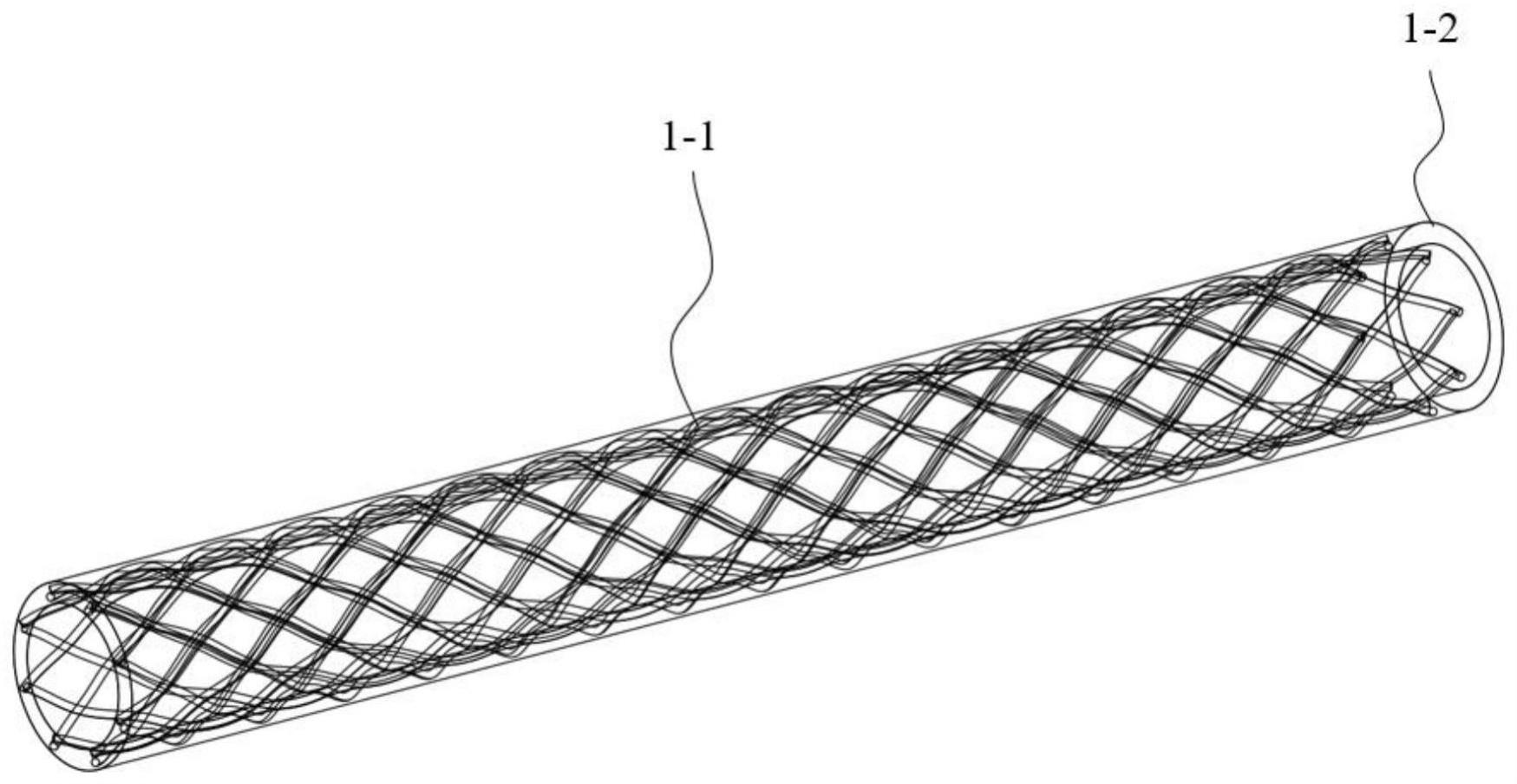
4、为实现以上目的,本发明通过以下技术方案予以实现:一种用于软体机器人的多级纤维阻塞变刚度织物结构,包括织物结构、密封膜,所述织物结构由多根编织线织成,所述编织线由多根细线编织而成,且细线间彼此可滑动,所述细线由各向同性材料制成,所述密封膜可覆盖织物结构内外表面并形成一个封闭内腔,所述织物结构置于封闭内腔中,所述封闭内腔通过抽气装置抽出腔内气体,使密封膜压紧于织物结构表面。
5、优选的,所述细线还可以用更细的线采用螺旋编织缠绕而成。再螺旋缠绕所述细线形成所述编织线。在负压、密封膜的作用下可实现编织线间、编织线内部细线间、细线的更细线间三级的纤维阻塞机制。
6、优选的,所述织物结构形状可为圆管状、片状、方管状中的一种,以满足软体机器人的定制化需求。
7、优选的,所述织物结构的多根编织线通过针织、机织、编织中的一种方式织成。
8、(三)有益效果
9、本发明提供了一种用于软体机器人的多级纤维阻塞变刚度织物结构。具备以下有益效果:
10、1、该用于软体机器人的多级纤维阻塞变刚度织物结构,通过由细线编织到编织线,再由编织线编织到织物结构,所形成的多级纤维阻塞变刚度织物结构可实现编织线间、编织线内部细线间的双级纤维阻塞,达到更佳的变刚度效果。
11、2、该用于软体机器人的多级纤维阻塞变刚度织物结构,将阻塞纤维材料通过纺织方法交错制成织物结构,与现有的并排排列阻塞纤维相比,纤维间的相对位置稳固,结构鲁棒性更强。
12、3、该用于软体机器人的多级纤维阻塞变刚度织物结构,采用各向同性材料制成的细线所最终织成的织物结构,与一般的纺织纤维相比刚度更高,结构可呈现较为稳定的结构轮廓与空间形状。
技术特征:
1.一种用于软体机器人的多级纤维阻塞变刚度织物结构,其特征在于:包括织物结构、密封膜,所述织物结构由多根编织线织成,所述编织线由多根细线编织而成,且细线间彼此可滑动,所述细线由各向同性材料制成,所述密封膜可覆盖织物结构内外表面并形成一个封闭内腔,所述织物结构置于封闭内腔中,所述封闭内腔通过抽气装置抽出腔内气体,使密封膜压紧于织物结构表面。
2.根据权利要求1所述的一种用于软体机器人的多级纤维阻塞变刚度织物结构,其特征在于:所述细线由更细的线编织而成。
3.根据权利要求1所述的一种用于软体机器人的多级纤维阻塞变刚度织物结构,其特征在于:所述织物结构形状可为圆管状、片状、方管状中的一种。
4.根据权利要求1所述的一种用于软体机器人的多级纤维阻塞变刚度织物结构,其特征在于:所述织物结构的多根编织线通过针织、机织、编织中的一种方式织成。
技术总结
本发明提供一种用于软体机器人的多级纤维阻塞变刚度织物结构,涉及软体机器人领域,包括织物结构、密封膜,所述织物结构由多根编织线织成,所述编织线由多根细线编织而成,且细线间彼此可滑动,所述细线由各向同性材料制成,所述密封膜可覆盖织物结构内外表面并形成一个封闭内腔,所述织物结构置于封闭内腔中,所述封闭内腔通过抽气装置抽出腔内气体,使密封膜压紧于织物结构表面。该用于软体机器人的多级纤维阻塞变刚度织物结构,通过由细线编织到编织线,再由编织线编织到织物结构,所形成的多级纤维阻塞变刚度织物结构可实现编织线间、编织线内部细线间的双级纤维阻塞,达到更佳的变刚度效果。
技术研发人员:尚祖峰,陈嘉睿,胡兴涛,周智凯,冯云颖
受保护的技术使用者:浙江理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!