一种旋转式机械臂和硅片加工设备的制作方法
本发明实施例涉及半导体加工,尤其涉及一种旋转式机械臂和硅片加工设备。
背景技术:
1、硅片生产加工过程中,例如现有的硅片刻蚀等加工工艺中,常使用旋转式机械臂对硅片进行加工和支撑,然而,现有旋转式机械臂通常为整体结构,只能整体同步旋转,这导致现有的机械臂可能无法适应多个晶圆不同的状态,导致晶圆卡偏,同时,为了保护晶圆,现有的旋转式机械臂表面通常需要涂覆保护层,然而所使用的保护层材质较脆且成本较高,使用时,一旦损坏会导致机械臂整体报废,适用成本较高。
技术实现思路
1、本发明实施例提供一种旋转式机械臂和硅片加工设备,以解决现有整体式旋转式机械臂仅能整体同步旋转,以及损坏时需要整体报废的问题。
2、为解决上述问题,本发明是这样实现的:
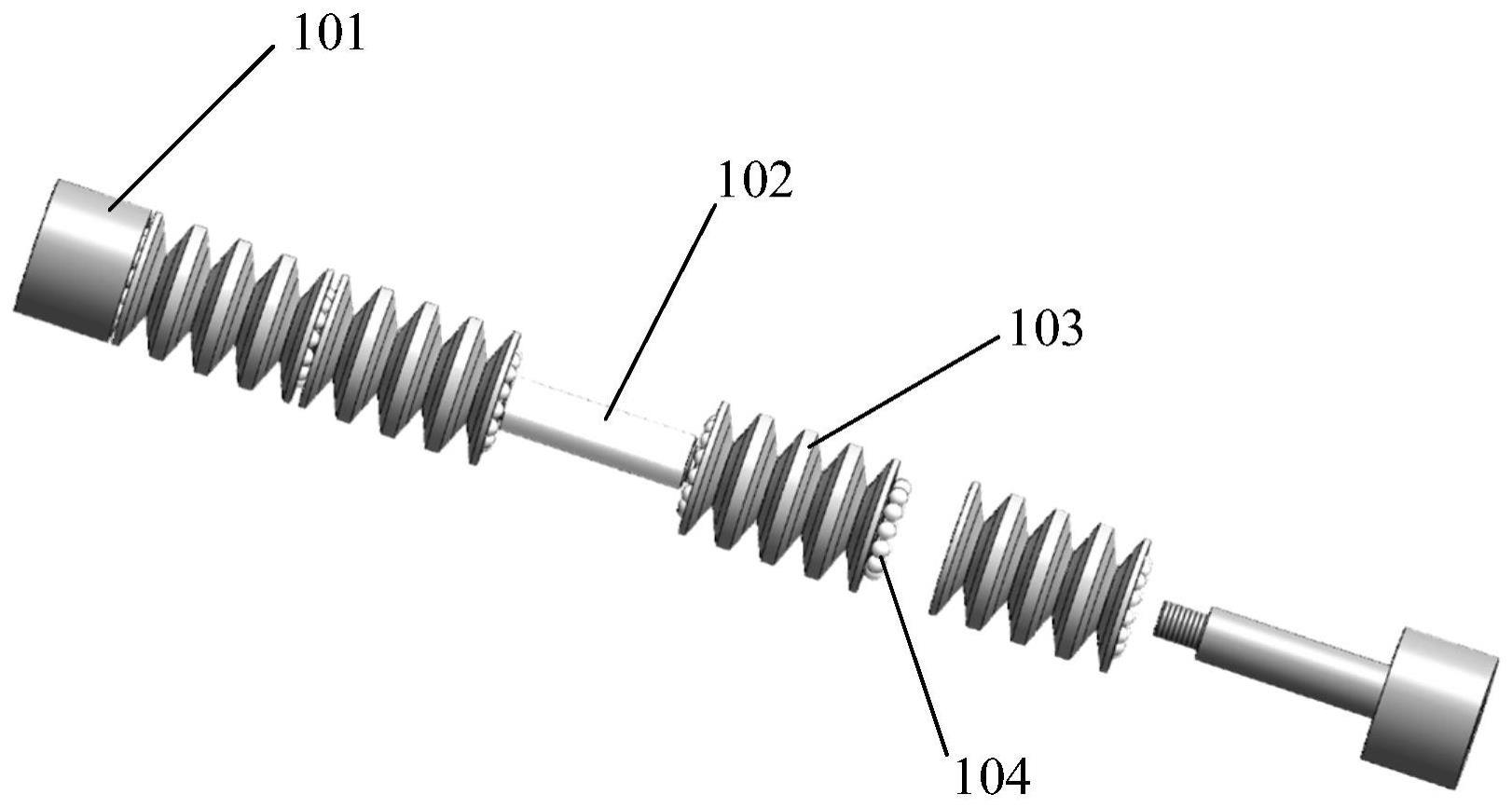
3、第一方面,本一种旋转式机械臂,用于承载硅片,所述旋转式机械臂包括:
4、连接头;
5、连接杆,连接于两个所述连接头之间;以及
6、多个支撑结构,沿所述支撑结构的顶部到底部的轴线方向上,所述支撑结构的尺寸逐渐减小,所述支撑结构开设有沿所述轴线方向的通孔,所述支撑结构通过所述通孔套设于所述连接杆,所述支撑结构的方向交替设置,以使部分相邻的所述支撑结构的顶部相对设置,且部分相邻的所述支撑结构的底部相对设置,在相邻两个所述支撑结构的顶部相对设置的情况下,相邻两个所述支撑结构的顶部之间形成承载硅片的承载位。
7、在其中一些实施例中,还包括深沟球轴承,所述深沟球轴承套设于所述连接杆上,所述深沟球轴承设置于底部相对设置的两个所述支撑结构之间,且与所述支撑结构的底部相抵接。
8、在其中一些实施例中,多个所述支撑结构和深沟球轴承相互连接形成支撑模组,且所述支持模组的两端为支撑结构,且位于所述支撑模组两端的所述支撑结构的底部朝向所述支撑模组的外侧。
9、在其中一些实施例中,所述连接头朝向所述连接杆的一侧设置有环形的凹槽,其中,最靠近所述连接头的支撑结构的底部朝向所述连接头设置,且最靠近所述连接头的支撑结构的底部通过深沟球轴承与所述连接头上的凹槽相配合。
10、在其中一些实施例中,所述连接杆的长度小于第一厚度和第二厚度之和,其中,所述第一厚度为套设于所述连接杆上的支撑结构沿所述连接杆的长度方向上的尺寸,所述第二厚度为套设于所述连接杆上的深沟球轴承沿所述连接杆的长度方向的尺寸。
11、在其中一些实施例中,所述连接杆由多根子杆首尾依次连接形成。
12、在其中一些实施例中,所述子杆的端部设置有螺纹或螺杆,所述多根子杆通过所述螺纹和所述螺杆相配合以首位依次连接。
13、在其中一些实施例中,在垂直于所述支撑结构的轴线方向上,所述支撑结构的截面呈圆形。
14、在其中一些实施例中,各所述支撑结构的表面设置有聚醚醚酮涂层。
15、第二方面,本发明实施例提供了一种硅片加工设备,包括第一方面中任一项所述的旋转式机械臂。
16、本发明实施例的旋转式机械臂,通过套设在连接杆上的多个支撑结构形成支撑晶圆的支撑部,使得各支撑部能够相对独立的绕连接杆旋转,而并非必须整体同步旋转,这样,当需要支撑的晶圆处于不同姿态时,能够通过支撑结构自适应的旋转以满足对处于不同状态的晶圆的支撑需求,同时,由于各支撑结构套设在依次连接的支撑杆上,当支撑结构局部损坏时,可以拆卸支撑杆以对损坏的支撑结构进行更换,而不需要整体报废,有助于降低维护和使用成本。
技术特征:
1.一种旋转式机械臂,用于承载硅片,所述旋转式机械臂包括:
2.如权利要求1所述的旋转式机械臂,其特征在于,还包括深沟球轴承,所述深沟球轴承套设于所述连接杆上,所述深沟球轴承设置于底部相对设置的两个所述支撑结构之间,且与所述支撑结构的底部相抵接。
3.如权利要求2所述的旋转式机械臂,其特征在于,多个所述支撑结构和深沟球轴承相互连接形成支撑模组,且所述支持模组的两端为支撑结构,且位于所述支撑模组两端的所述支撑结构的底部朝向所述支撑模组的外侧。
4.如权利要求2所述的旋转式机械臂,其特征在于,所述连接头朝向所述连接杆的一侧设置有环形的凹槽,其中,最靠近所述连接头的支撑结构的底部朝向所述连接头设置,且最靠近所述连接头的支撑结构的底部通过深沟球轴承与所述连接头上的凹槽相配合。
5.如权利要求2所述的旋转式机械臂,其特征在于,所述连接杆的长度小于第一厚度和第二厚度之和,其中,所述第一厚度为套设于所述连接杆上的支撑结构沿所述连接杆的长度方向上的尺寸,所述第二厚度为套设于所述连接杆上的深沟球轴承沿所述连接杆的长度方向的尺寸。
6.如权利要求1所述的旋转式机械臂,其特征在于,所述连接杆由多根子杆首尾依次连接形成。
7.如权利要求6所述的旋转式机械臂,其特征在于,所述子杆的端部设置有螺纹或螺杆,所述多根子杆通过所述螺纹和所述螺杆相配合以首位依次连接。
8.如权利要求1所述的旋转式机械臂,其特征在于,在垂直于所述支撑结构的轴线方向上,所述支撑结构的截面呈圆形。
9.如权利要求1至8中任一项所述的旋转式机械臂,其特征在于,各所述支撑结构的表面设置有聚醚醚酮涂层。
10.一种硅片加工设备,其特征在于,包括权利要求1至9中任一项所述的旋转式机械臂。
技术总结
本发明提供一种旋转式机械臂和硅片加工设备。旋转式机械臂,用于承载硅片,所述旋转式机械臂包括:连接头;连接杆,连接于两个所述连接头之间;以及多个支撑结构,沿所述支撑结构的顶部到底部的轴线方向上,所述支撑结构的尺寸逐渐减小,所述支撑结构开设有沿所述轴线方向的通孔,所述支撑结构通过所述通孔套设于所述连接杆,所述支撑结构的方向交替设置,以使部分相邻的所述支撑结构的顶部相对设置,且部分相邻的所述支撑结构的底部相对设置,在相邻两个所述支撑结构的顶部相对设置的情况下,相邻两个所述支撑结构的顶部之间形成承载硅片的承载位。本发明实施例在支撑结构损坏时,能够便于更换,不需要整体报废,有助于降低维护和使用成本。
技术研发人员:康家榕,胡一洲,张立易,程瑜,张世东
受保护的技术使用者:西安奕斯伟材料科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!