一种机械臂动力学标准参数的辨识方法与流程
本发明涉及机器人动力学,更具体地说,它涉及一种机械臂动力学标准参数的辨识方法。
背景技术:
1、随着机械臂的应用在医疗健康领域被深入开发研究,对于机械臂自身的控制精度要求逐步提高。机械臂结构中复杂元器件的使用以及生产装配时产生的问题导致机械臂的动力学参数与出场设定值并不相同,再有工作场合的拓展使得安装在机械臂末端的工具与手爪变得复杂,机械臂各关节的动力学惯性参数随之改变。为了使机械臂在更为复杂的工作环境下也能拥有较高的精度,或者拓展机械臂的使用场景,这需要重新对机械臂的动力学模型进行精确的建模与分析,这需要通过一系列复杂的流程与方法对机械臂的惯性参数进行辨识等工作。
2、现有动力学参数辨识的方法,如公告号为cn113021331b的专利公开了一种七自由度协作机器人动力学建模与辨识方法,所辨识出的参数为机械臂的动力学最小参数集,最小参数集可能是单独项,可能是某几个参数的耦合项。其耦合上述几项内容,是没有独立物理意义的,根据最小参数集建立的动力学方程式可用于检验机械臂的力矩相关性能,但是当机械臂安装的位置发生改变,或拓展自身是零件时,其出厂的动力学标准参数就变得不准确,此时再用最小参数集进行验证也无法得知其实际的物理性质的变化。
3、因此,如何直接辨识出机械臂当前的动力学标准参数正是本申请所要解决的技术问题。
技术实现思路
1、针对现有技术存在的不足,本发明的目的是提供一种机械臂动力学标准参数的辨识方法,当机械臂内部零部件发生改变,迁移安装位置或进行机械结构拓展时,可以用本方法辨识的标准参数直接取代机械臂出厂的标准参数重新建立动力学模型,以提高机械臂运动控制的精度。
2、为实现上述目的,提供了如下技术方案:
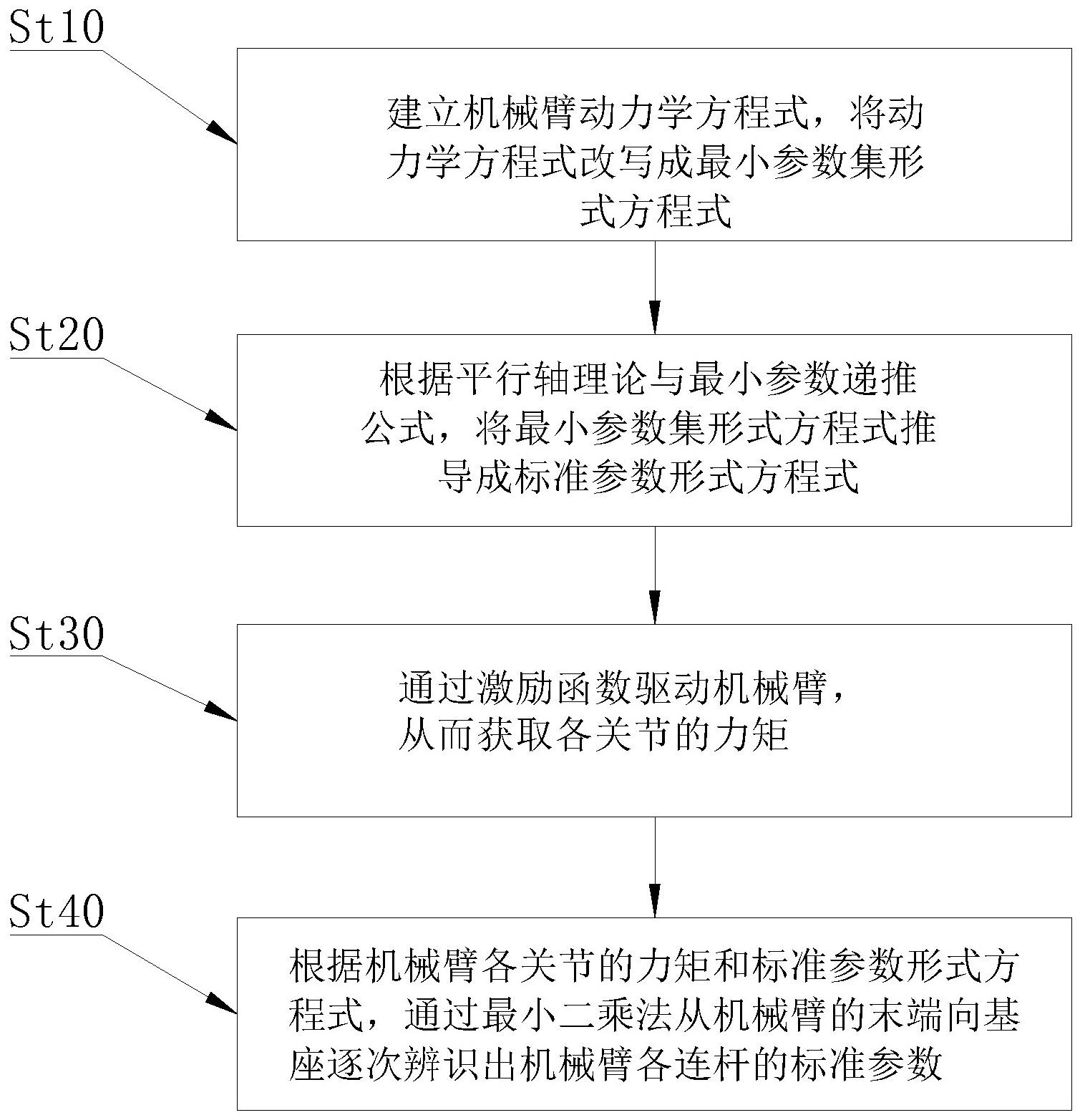
3、st10、一种机械臂动力学标准参数的辨识方法,其包括以下过程:建立机械臂动力学方程式,将动力学方程式改写成最小参数集形式方程式。
4、st20、根据平行轴理论与最小参数递推公式,将所述最小参数集形式方程式推导成标准参数形式方程式。
5、st30、通过激励函数驱动机械臂,从而获取各关节的力矩。
6、st40、根据机械臂各关节的力矩和所述标准参数形式方程式,通过最小二乘法从机械臂的末端向基座逐次辨识出机械臂各连杆的标准参数。
7、综上所述,上述技术方案具有以下有益效果:由标准参数建立的动力学方程式经过平行轴理论与最小参数递推公式的推导,将最小参数集推导回标准参数形式,最后通过实验力矩逐次辨识得到各连杆当前的标准参数,得到的标准参数具有独立物理意义,可以进行后续的开发研究,也直接用于工程化应用,解决了机械臂内部零部件发生改变,迁移安装位置或进行机械结构拓展后动力学标准参数不再精准的技术问题,得到了辨识精度更高的标准参数,在机器人进行控制时具有更高的安全性与更好的性能。
技术特征:
1.一种机械臂动力学标准参数的辨识方法,其特征在于,包括以下过程:建立机械臂动力学方程式,将动力学方程式改写成最小参数集形式方程式;
2.根据权利要求1所述的机械臂动力学标准参数的辨识方法,其特征在于,
3.根据权利要求2所述的机械臂动力学标准参数的辨识方法,其特征在于,各个连杆的标准参数集pb*分别包括各自连杆的惯性张量参数、质心参数和质量参数,标准参数集pb*为:,
4.根据权利要求3所述的机械臂动力学标准参数的辨识方法,其特征在于,根据物理一致性法则的约束条件确定各个所需待辨识的标准参数的精度区间;
5.根据权利要求4所述的机械臂动力学标准参数的辨识方法,其特征在于,物理一致性法则的约束条件包括各连杆的质量参数均大于零、各连杆惯性张量矩阵对角线上元素均大于0,以及各连杆惯性张量矩阵对角线上任意两元素之和大于第三个元素。
6.根据权利要求4所述的机械臂动力学标准参数的辨识方法,其特征在于,待辨识的标准参数的上限和下限均在出厂标准参数的50%之内。
7.根据权利要求1-6任一项所述的机械臂动力学标准参数的辨识方法,其特征在于,获取各关节的力矩后,对力矩数据进行采样与滤波。
8.根据权利要求1-6任一项所述的机械臂动力学标准参数的辨识方法,其特征在于,辨识机械臂某一连杆的标准参数时,将位于该连杆末端方向之后所有连杆的已辨识标准参数作为已辨识值参与计算。
9.根据权利要求1-6任一项所述的机械臂动力学标准参数的辨识方法,其特征在于,辨识机械臂最末端连杆的标准参数时,仅最末端连杆其自身未辨识的标准参数参与计算。
技术总结
本发明请求保护一种机械臂动力学标准参数的辨识方法,包括建立机械臂动力学方程式,将动力学方程式改写成最小参数集形式方程式。根据平行轴理论与最小参数递推公式,将最小参数集形式方程式推导成标准参数形式方程式。通过激励函数驱动机械臂,从而获取各关节的力矩。根据机械臂各关节的力矩和标准参数形式方程式,通过最小二乘法从机械臂的末端向基座逐次辨识出机械臂各连杆的标准参数。由标准参数建立的动力学方程式经过平行轴理论与最小参数递推公式的推导,将辨识参数的最小参数集推导回标准参数形式,最后通过实验力矩逐次拟合得到各连杆当前的标准参数,得到的标准参数具有独立物理意义,可以进行后续的开发研究,也直接用于工程化应用。
技术研发人员:刘振,邵超,朱蓉军,黄琦
受保护的技术使用者:合肥合滨智能机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!