仓库散料堆的自动化库存监测方法、机器人和网络系统与流程
本发明涉及仓库监测,例如涉及一种仓库散料堆的自动化库存监测方法、机器人和网络系统。
背景技术:
1、仓库中的散料堆例如粮食堆需要经常进行库存盘点,以统计库存质量的变化,从而在库存质量较少或库存质量较多的情况下采取对应的措施。现有的散料堆库存盘点方法主要分为两类,第一类方法是人工监测,每天安排巡库人员到达仓库,在仓库内的指定位置拍照,通过人工比对不同日期拍摄的照片的散料堆轮廓来判断散料堆的变化情况。第二类方法是基于图像处理对散料堆进行库存盘点,例如cn116002270a公开了从仓库货物的历史物流记录中提取每种货物的历史出仓数量,根据历史出仓数量,判断对应货物是否处于仓储短缺状态,并将处于仓储短缺状态的货物在仓库内部的仓储区域确定为目标监测区域。指示接入到物联网的摄像头采集目标监测区域的全景区域影像,对全景区域影像进行分析处理,得到目标监测区域的货物存放总数量和当前存放的货物的包装状态信息,以此作为库存信息。
2、但是,上述第一类散料堆库存盘点方法存在人工判断库存变化量的准确度较低,且人力资源成本较高的问题。第二类散料堆库存盘点方法存在需要提取货物的历史出仓量,若历史出仓量的准确性较低,则可能选择错误的目标监测区域,导致得到错误的库存信息。
技术实现思路
1、本发明目的在于:提供一种仓库散料堆的自动化库存监测方法、机器人和网络系统,其能够解决现有的散料堆库存盘点方法存在的人工判断库存变化量的准确度较低,以及历史出仓量的准确性较低导致得到错误的库存信息的问题。
2、为达到上述目的,本发明第一方面提供了一种仓库散料堆的自动化库存监测方法,包括:
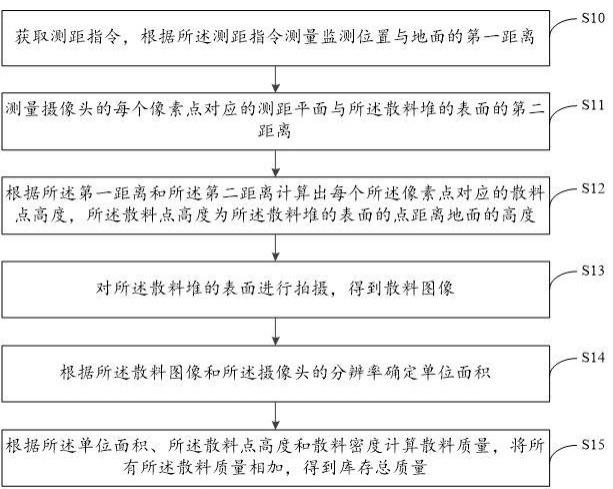
3、获取测距指令,根据所述测距指令测量监测位置与地面的第一距离;
4、测量摄像头的每个像素点对应的测距平面与所述散料堆的表面的第二距离;
5、根据所述第一距离和所述第二距离计算出每个所述像素点对应的散料点高度,所述散料点高度为所述散料堆的表面的点距离地面的高度;
6、对所述散料堆的表面进行拍摄,得到散料图像;
7、根据所述散料图像和所述摄像头的分辨率确定单位面积;
8、根据所述单位面积、所述散料点高度和散料密度计算散料质量,将所有所述散料质量相加,得到库存总质量。
9、优选地,所述根据所述散料图像和所述摄像头的分辨率确定单位面积,包括:
10、从所述散料图像中提取出所述摄像头覆盖的地面面积;
11、将所述地面面积与所述摄像头的分辨率的比值作为单位面积。
12、优选地,所述根据所述单位面积、所述散料点高度和散料密度计算散料质量,包括:
13、根据以下公式计算第个散料质量:
14、;
15、其中,为散料密度,为所述第一距离,为所述摄像头的第个所述像素点对应的所述第二距离,为所述摄像头的第个所述像素点对应的所述散料点高度,为所述地面面积,为所述摄像头的分辨率,为所述单位面积,为第个所述散料质量。
16、优选地,所述根据所述测距指令测量监测位置与地面的第一距离之前,还包括:
17、接收所述测距指令,对所述测距指令进行解密,得到解密指令;
18、根据所述解密指令检测是否位于所述监测位置,若否,则沿架空路线移动至所述监测位置。
19、优选地,所述根据所述第一距离和所述第二距离计算出像素对应的散料点高度,包括:
20、将所述第一距离减去所述第二距离,得到所述散料点高度;所述监测位置为摄像头的位置。
21、优选地,所述将所有所述散料质量相加,得到库存总质量,包括:
22、根据以下公式计算库存总质量:
23、;
24、其中,为所述库存总质量,为第个所述散料质量,为所述散料质量的总数。
25、优选地,所述将所有所述散料质量相加,得到库存总质量之后,还包括:
26、对所述库存总质量进行加密,得到已加密总质量;
27、将所述已加密总质量发送至控制服务器。
28、本发明第二方面提供了一种机器人,应用于上述任一项仓库散料堆的自动化库存监测方法,机器人包括:
29、摄像头,用于根据所述测距指令测量监测位置与地面的第一距离,以及对所述散料堆的表面进行拍摄,得到散料图像;
30、机械臂,所述机械臂的第一端设置有所述摄像头,所述机械臂用于调节所述摄像头的高度;
31、计算模块,所述计算模块与所述摄像头连接,所述计算模块用于测量摄像头的每个像素点对应的测距平面与所述散料堆的表面的第二距离;根据所述第一距离和所述第二距离计算出每个所述像素点对应的散料点高度;根据所述散料图像和所述摄像头的分辨率确定单位面积,以及根据所述单位面积、所述散料点高度和散料密度计算散料质量,将所有所述散料质量相加,得到库存总质量;
32、控制模块,所述控制模块与所述机械臂连接,所述控制模块用于获取测距指令;所述控制模块用于控制所述机械臂的自由度。
33、优选地,行走轮,所述行走轮与所述控制模块连接,所述行走轮用于接收所述控制模块的控制信号,根据所述控制信号沿架空路线移动至所述监测位置;
34、供电模块,所述供电模块与所述摄像头、所述计算模块和所述控制模块电连接,所述供电模块用于向所述摄像头、所述计算模块和所述控制模块供电。
35、本发明第三方面提供了一种网络系统,应用于上述机器人,网络系统包括:
36、控制服务器,用于发送加密后的测距指令;
37、前置仓库服务器,所述前置仓库服务器通过公共网络与所述控制服务器连接,所述前置仓库服务器用于接收所述测距指令,对所述测距指令进行解密,得到解密指令;将所述解密指令发送至所述控制模块,将所述计算模块反馈的所述库存总质量发送至所述控制服务器。
38、本发明的一种仓库散料堆的自动化库存监测方法,包括获取测距指令,根据测距指令测量监测位置与地面的第一距离。测量摄像头的每个像素点对应的测距平面与散料堆的表面的第二距离。监测位置为摄像头的位置,可以在仓库中设置多个摄像头,测量每个摄像头对应的监测位置与地面的第一距离。摄像头的每个像素点对应散料堆的表面的一个点,在散料堆的表面上不同点距离地面的高度不同。根据第一距离和第二距离计算出每个像素点对应的散料点高度,散料点高度为散料堆的表面的点距离地面的高度。对散料堆的表面进行拍摄,得到散料图像。从散料图像中可以分析出散料堆的总面积,结合摄像头的分辨率以确定单位面积。根据单位面积、散料点高度和散料密度计算散料质量,将所有散料质量相加,得到库存总质量。上述方法可以实时监测散料堆仓库的库存质量变化,基于摄像头的每个像素点对应的散料点高度,可以准确地检测散料质量,从而正确地得到库存总质量的变化情况。
技术特征:
1.一种仓库散料堆的自动化库存监测方法,其特征在于,包括:
2.根据权利要求1所述的仓库散料堆的自动化库存监测方法,其特征在于,所述根据所述散料图像和所述摄像头的分辨率确定单位面积,包括:
3.根据权利要求2所述的仓库散料堆的自动化库存监测方法,其特征在于,所述根据所述单位面积、所述散料点高度和散料密度计算散料质量,包括:
4.根据权利要求1所述的仓库散料堆的自动化库存监测方法,其特征在于,所述根据所述测距指令测量监测位置与地面的第一距离之前,还包括:
5.根据权利要求1所述的仓库散料堆的自动化库存监测方法,其特征在于,所述根据所述第一距离和所述第二距离计算出像素对应的散料点高度,包括:
6.据权利要求3所述的仓库散料堆的自动化库存监测方法,其特征在于,所述将所有所述散料质量相加,得到库存总质量,包括:
7.根据权利要求1所述的仓库散料堆的自动化库存监测方法,其特征在于,所述将所有所述散料质量相加,得到库存总质量之后,还包括:
8.一种机器人,其特征在于,应用于权利要求1-7任一项所述的仓库散料堆的自动化库存监测方法,所述机器人包括:
9.根据权利要求8所述的机器人,其特征在于,还包括:
10.一种网络系统,其特征在于,应用于权利要求8所述的机器人,所述网络系统包括:
技术总结
本发明公开了仓库散料堆的自动化库存监测方法、机器人和网络系统,其中方法包括获取测距指令,根据测距指令测量监测位置与地面的第一距离。测量摄像头的每个像素点对应的测距平面与散料堆的表面的第二距离。根据第一距离和第二距离计算出每个像素点对应的散料点高度。对散料堆的表面进行拍摄,得到散料图像。根据散料图像和摄像头的分辨率确定单位面积。根据单位面积、散料点高度和散料密度计算散料质量,将所有散料质量相加,得到库存总质量。上述方法可以实时监测散料堆仓库的库存质量变化,基于摄像头的每个像素点对应的散料点高度,可以准确地检测散料质量,从而正确地得到库存总质量的变化情况。
技术研发人员:伍灼研,谢斌,王壁,周广涛
受保护的技术使用者:广州侨益科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!